







 本文介绍了Linux系统中进程间通信的多种方法,包括管道(有名和无名)、消息队列(System V和POSIX)、信号量(System V和POSIX)、共享内存(内存映射和普通共享内存)以及信号。详细阐述了各种通信方式的原理、特点、创建和操作函数,还提及了相关命令的使用。
本文介绍了Linux系统中进程间通信的多种方法,包括管道(有名和无名)、消息队列(System V和POSIX)、信号量(System V和POSIX)、共享内存(内存映射和普通共享内存)以及信号。详细阐述了各种通信方式的原理、特点、创建和操作函数,还提及了相关命令的使用。
进程间通信
进程间通信(IPC):指多个进程之间传输数据或共享信息的机制,在操作系统中每个进程的地址空间和资源是独立的,为了实现多个进程间的数据交换和协作,需要使用IPC机制。最终结果就是进程能够访问相同的内存区域。
进程间通信的方法:
- 管道:有名管道,无名管道。
- 消息队列
- 信号量
- 共享内存:内存映射实现,共享内存传递数据。
- 信号:通过特定信号执行处理情况。
- socket:主要是网络通信中用到。
管道
无名管道:有亲缘关系的进程间单向通信。管道的本质其实就是内核中的一块内存(或者叫内核缓冲区),这块缓冲区中的数据存储在一个环形队列中,因为管道在内核里边,因此我们不能直接对其进行任何操作。
- 半双工,数据单向流动,要实现全双工通信,要用两个管道。
- 字节流通信,数据格式由用户自行定义
- 多用于父子进程间
- 管道对应的内核缓冲区大小是固定的,默认为4k
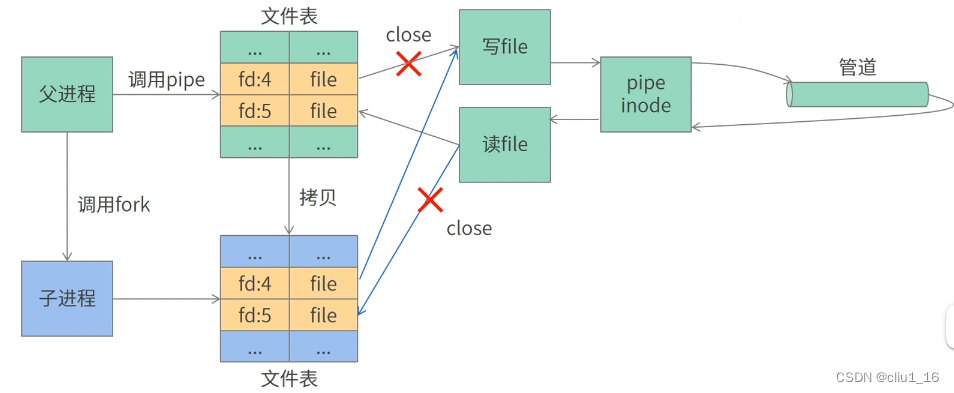
无名管道实现原理:
- 父进程调用pipe函数会创建两个文件分别用作读和写,对应节点为pipe inode。
- 父进程调用fork创建子进程,子进程拷贝父进程的文件表,由于父子进程文件表内容相同,指向的file相同,所以最终父子进程操作的pipe管道相同。
- fork函数成功后,父子进程不能同时保留读写文件描述符,需要关闭读或写文件描述符,防止父子进程同时读写引发数据错误。
创建无名管道进行父子进程的通信:
#include<unistd.h>
#include<iostream>
using namespace std;
int pipe_test(){
int fd[2];
int ret = pipe(fd);
if(ret == -1){
perror("pipe");
return -1;
}
ret = fork();
if(ret == -1){
perror("fork");
return -1;
}else if(ret == 0){
// 子进程
close(fd[0]); // 关闭读端
string s = "123456";
while(1){
write(fd[1],s.c_str(),s.size());
sleep(1);
}
}else if(ret>0){
// 父进程
close(fd[1]); // 关闭写端
while(1){
char buf[1024] = {0};
read(fd[0],buf,1024);
cout<<buf<<endl;
}
wait(NULL);
}
}
int main(){
pipe_test();
return 0;
}
有名管道:(FIFO文件)是一种特殊类型的文件,在磁盘上有实体文件, 文件类型为p ,有名管道文件大小永远为0,因为有名管道也是将数据存储到内存的缓冲区中,打开这个磁盘上的管道文件就可以得到操作有名管道的文件描述符,通过文件描述符读写管道存储在内核中的数据。
- 可以通过名称进行识别和访问,而不仅仅依赖于文件描述符,因此相比于无名管道,有名管道可以用于没有亲缘关系的进程间通信。
- 可以像其他文件一样进行访问和管理,文件类型为p。
- 半双工通信,同时写入和读取操作,但需要多个fifo文件。
有名管道的创建方式有两种:
- 通过命令:mkfifo 文件名
- 通过函数:int mkfifo(const char *pathname, mode_t mode); pathname是要创建的管道的名字,mode为文件权限。

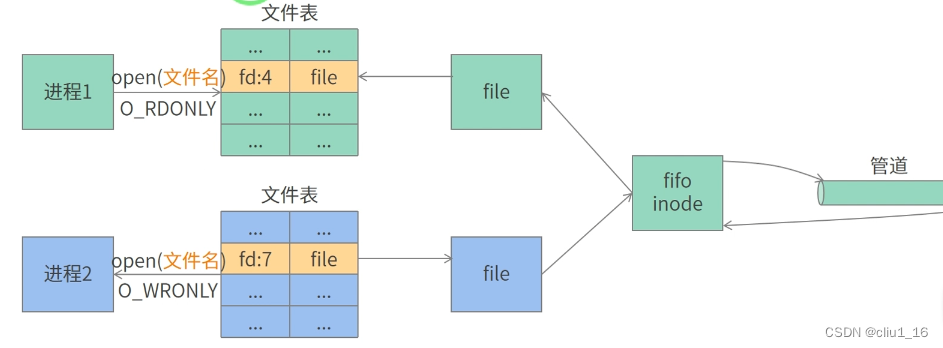
有名管道实现原理:管道创建成功以后,进程调用open打开FIFO文件,多个进程都可以打开相同的inode节点,进程间都可以看到管道内存空间,所以进程间能够正常通信。多个进程同时读写一个命名管道可能会出现数据异常,所以进程调用open函数时需要指定打开标志为O_RDONLY或者O_WRONLY。
#include<unistd.h>
#include<iostream>
#include <sys/wait.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <string.h>
using namespace std;
#define FIFO_PATH "./testfifo"
int fifo_read(){
int rfd = open(FIFO_PATH, O_RDONLY);
if(rfd == -1)
{
perror("open");
return -1;
}
while(1){
char buf[1024] = {0};
read(rfd,buf,1024);
cout<<buf<<endl;
}
close(rfd);
return 0;
}
int fifo_write(){
int ret = mkfifo(FIFO_PATH,0644);
if((ret == -1)&& errno!= EEXIST){
perror("mkfifo");
return -1;
}
int wfd = open(FIFO_PATH, O_WRONLY);
if(wfd == -1)
{
perror("open");
return -1;
}
int i = 0;
while(i<100)
{
char buf[1024];
sprintf(buf, "hello, fifo, 我在写管道...%d\n", i);
write(wfd, buf, strlen(buf));
i++;
sleep(1);
}
close(wfd);
return 0;
}
int fifo_test(){
int ret = fork();
if(ret == 0){
fifo_read();
}else if(ret > 0){
fifo_write();
}else{
perror("fork");
return -1;
}
return 0;
}
int main(){
fifo_test();
return 0;
}
消息队列
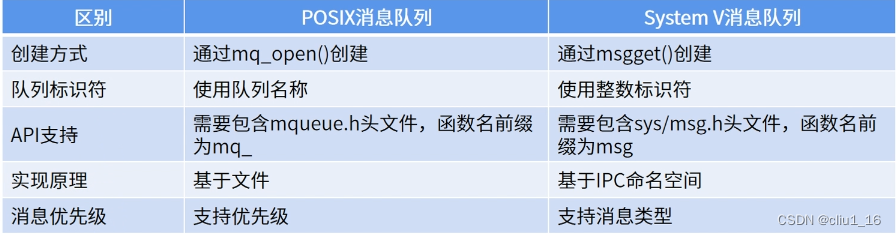
System V消息队列:允许在同一系统上运行的不同进程间进行消息传递。
- 可以实现独立的进程间通信,不受进程的启动和结束顺序的影响。
- 允许多个进程同时向消息队列中写入和读取消息,实现了并发处理。
- 通过消息优先级机制,可以优先处理重要的消息。
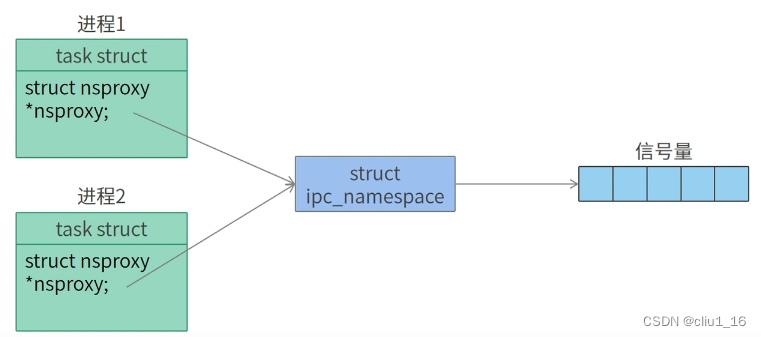
消息队列实现原理:具有相同IPC命名空间的进程可以同时访问IPC命名空间相同内存。
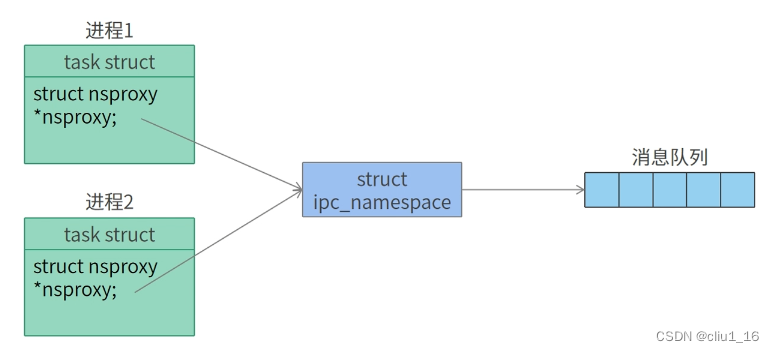
IPC对象是消息队列,信号量,共享内存的父对象
- ftok函数用于产生Sytem V键值。
- msgget函数用于创建或获取一个System V消息队列,返回标识ID,后续根据标识ID查找消息队列进行进程间通信。
- msgsnd函数将一个消息添加到一个指定的消息队列中。msgsnd函数的参数非常重要,需要仔细查阅用法。
- msgrvc函数接收缓冲区中的消息。
- msgctl函数对消息队列中进行控制操作。
ipcs命令可用于查看System V IPC对象信息(消息队列,信号量,共享内存)
ipcs -a // 查看消息队列,信号量,共享内存
ipcs -q // 查看消息队列
ipcmk主要用于创建IPC对象信息。
ipcmk -Q 创建消息队列
ipcrm -q 删除消息队列
// 打开两个终端进行读写即可看到消息队列的交互
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>
#include <iostream>
#include <string.h>
#include <unistd.h>
using std::cout;
using std::endl;
struct message {
long mtype;
char mtext[100];
};
int main(int argc, char *argv[]){
int mode = atoi(argv[1]);
key_t key = 1234;//也可以用ftok
int id = msgget(key,0644|IPC_CREAT); //通过key值创建消息队列
while(1){
if(mode == 0){
message msg;
msg.mtype = atoi(argv[2]);
int ret = msgrcv(id, &msg, sizeof(msg), msg.mtype, 0); // 接收消息
if(ret == -1){
perror("msgrcv");
break;
}
cout<<" type: "<<msg.mtype <<" mtext: "<<msg.mtext<<endl;
}else{
message msg;
msg.mtype = atoi(argv[2]);
strcpy(msg.mtext, "Hello Message Queue"); //可以手动输入
int ret = msgsnd(id,&msg,sizeof(msg),0); // 发送消息
if(ret == -1){
perror("msgsnd");
break;
}
sleep(1);
}
}
msgctl(id,IPC_RMID,0); // 通过id删除消息队列
return 0;
}
POSIX消息队列:POSIX消息队列是一种基于文件的消息队列,system v进程间通信实现方式不能和文件兼容,Linux一切皆文件,所以选择posix进程间通信方式会更好些。
POSIX消息队列是基于mqueue文件系统实现,POSIX消息队列其实就是mqueue文件系统的一个inode节点。
mount | grep “mqueue” 查看mqueue文件系统挂载点,挂在路径为/dev/mqueue。
POSIX消息队列底层实现为mqueue inode节点,基于红黑树存储信息。
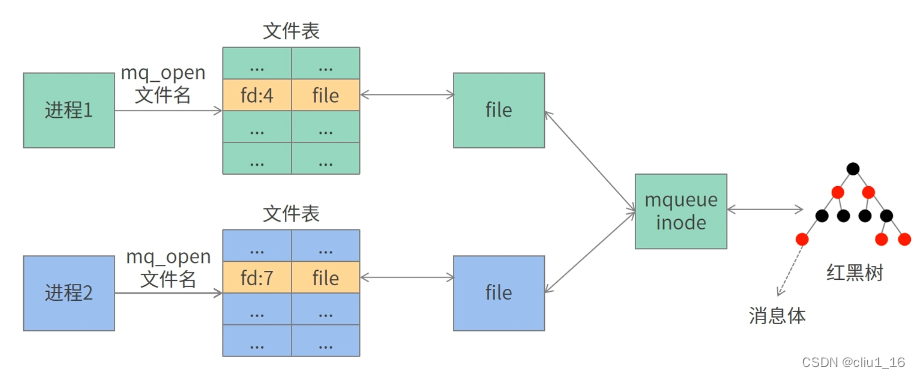
mq_open:打开或创建一个消息队列
mq_send:将消息太耐到消息队列,如果消息队列已满,则阻塞、
mq_receive:接收消息队列中的消息。
mq_notify:消息队列有通知的系统调用,可以用于进程发送通知,告诉它有新的消息到达了消息队列。
mq_cloas:关闭一个消息队列。
mq_unlink:删除一个消息队列,新使用一个消息队列,删除旧的。
POSIX消息队列编译的时候要加上 -lrt
// 消息队列,用mq_notify多线程的方式去读数据
#include<fcntl.h>
#include<sys/stat.h>
#include<mqueue.h>
#include<iostream>
#include<unistd.h>
#include<signal.h>
using std::cout;
using std::endl;
#define TEST_STRING "123456"
int do_notify(int fd);
void test_proc(sigval_t val);
// 处理函数
void test_proc(sigval_t val){
int fd = val.sival_int; //进程收到通知后,注册信息失效,需要重新注册
do_notify(fd);
char rbuf[2048] = {0};
unsigned int prio = 0;
int ret = mq_receive(fd,rbuf,2048,&prio);
if(ret == -1 ){
perror("mq_receive");
return;
}
cout<<"ret: "<<ret <<" prio: "<<prio<<" rbuf: "<<rbuf<<endl;
}
// mq_notify多线程的方式去读数据
int do_notify(int fd){
struct sigevent ev;
ev.sigev_value.sival_int = fd;
ev.sigev_notify = SIGEV_THREAD; // 线程
ev.sigev_notify_function = test_proc; //绑定函数
ev.sigev_notify_attributes = NULL;
int ret = mq_notify(fd,&ev);
if(ret == -1 ){
perror("mq_notify");
return -1;
}
return 0;
}
int main(int argc, char *argv[]){
int mode = atoi(argv[1]);
if(mode == -1){
mq_unlink("/posixMq1"); // 删除之前的消息队列,如果消息队列有更新,不清除的话,会占用
return 0;
}
struct mq_attr attr; //设置mq属性
attr.mq_flags = 0;
attr.mq_maxmsg = 10;
attr.mq_msgsize = 1500;
mqd_t fd = mq_open("/posixMq1", O_RDWR|O_CREAT, 0664, &attr);
if(fd == -1 ){
perror("mq_open");
return -1;
}
if(mode==0)
do_notify(fd); //完成注册
while(1){
if(mode == 0){
sleep(1);
#if 0
char rbuf[2048] = {0};
unsigned int prio = 0;
int ret = mq_receive(fd,rbuf,2048,&prio);
if(ret == -1 ){
perror("mq_receive");
break;
}
cout<<"ret: "<<ret <<" prio: "<<prio<<" rbuf: "<<rbuf<<endl;
#endif
}else{
int ret = mq_send(fd,TEST_STRING,sizeof(TEST_STRING),1);
if(ret == -1 ){
perror("mq_send");
break;
}
sleep(1);
}
}
return 0;
}
信号量
System V 信号量(System V Semaphores)和 POSIX 信号量(POSIX Semaphores)都是用于多进程或多线程之间进行进程同步和互斥的机制。
System V 信号量是一种在系统级别上维护的计数器,用于控制对共享资源的访问。它使用三个基本操作来操作信号量:创建、初始化和执行 P(proberen)和 V(verhogen)操作。P 操作用于申请资源,如果资源不可用,则进程会等待。V 操作用于释放资源,允许其他进程继续访问该资源。System V 信号量可以在不同进程间共享,并且可以持久化存储在系统中。
- P操作:等待操作或者减操作,用于申请资源,当信号量的值大于0时,将其减一,当信号量的值等于0时,进程将被阻塞。
- V操作:释放操作或加操作,用于释放资源,将信号量的值加一,并唤醒等待的进程。
实现原理:具有相同IPC命名空间的进程能够同时访问IPC命名空间相同内存空间,命名空间内维护信号量,和消息队列大同小异。
semget:创建或打开一个信号量集
semop:对信号量进行操作,semval:信号量值。
semctl:对一个已经存在的信号量集值进行各种操作,比如获取信号量集值的信息,设置信号量集的值,删除信号量等。
ipcs-a:查看消息队列,信号量,共享内存
ipcs-s:查看信号量
ipcmk -S 2 -p 0644 //创建信号量,权限为0644
ipcrm -s 6 //删除标识ID 6的信号量。
#include <fcntl.h>
#include <sys/stat.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
#include <iostream>
#include <unistd.h>
#include <signal.h>
using std::cout;
using std::endl;
union semun {
int val; // 用于 SETVAL 操作,设置信号量的初始值
struct semid_ds *buf; // 用于 IPC_STAT 和 IPC_SET 操作,获取和设置信号量的状态信息
unsigned short *array; // 用于 GETALL 和 SETALL 操作,获取和设置信号量的值数组
struct seminfo *__buf; // 用于 IPC_INFO 操作,获取系统的信号量信息
void *__pad;
};
// 初始化信号量,用setval命令
int sem_init_value(int id,int num,int value){
union semun un;
un.val = value;
int ret = semctl(id,num,SETVAL,un);
if(ret == -1){
perror("semctl SETVAL");
return -1;
}
cout<<"sem init value:"<<value<<endl;
return 0;
}
// 删除信号量
int sem_del_sem(int id) {
union semun un;
if (semctl(id,0,IPC_RMID,un)==-1) {
perror("semctl IPC_RMID");
exit(1);
}
return 0;
}
// 获取信号量值
int sem_get_value(int id,int num){
union semun un;
int ret = semctl(id,num,GETVAL,un);
if(ret == -1){
perror("semctl GETVAL");
return -1;
}
cout<<"sem get value:"<<ret<<endl;
return 0;
}
int sem_p(int id){
struct sembuf buf;
buf.sem_num = 0; // 信号量编号
buf.sem_op = -1; // P操作代表符号
buf.sem_flg |= SEM_UNDO;
int ret=semop(id,&buf,1);
if(ret == -1){
perror("semop p");
return -1;
}
return 0;
}
int sem_w(int id){
struct sembuf buf;
buf.sem_num = 0; //信号量编号
buf.sem_op = 0; // w操作代表符号
buf.sem_flg |= SEM_UNDO; //系统退出前未释放信号量,系统自动释放
int ret=semop(id,&buf,1);
if(ret == -1){
perror("semop w");
return -1;
}
return 0;
}
// 释放资源
int sem_v(int id){
struct sembuf buf;
buf.sem_num = 0; //信号量编号
buf.sem_op = 1; // v操作代表符号
buf.sem_flg |= SEM_UNDO; //系统退出前未释放信号量,系统自动释放
int ret=semop(id,&buf,1);
if(ret == -1){
perror("semop v");
return -1;
}
return 0;
}
int main(int argc, char *argv[]){
int op = atoi(argv[1]);
int value = atoi(argv[2]); //信号量的值初始化为value
key_t key = ftok("./system_v_msg",1); // 产生键值
if(key == -1){
perror("ftok");
return -1;
}
int id = semget(key,5,0644|IPC_CREAT); //创建信号量
cout<<id<<endl;
if(value>=0){
sem_init_value(id,0,value);
}
sem_get_value(id,0);
if(op == -1){
// 申请资源 P操作
sem_p(id);
}else if(op == 0){
// wait
sem_w(id);
}else{
// 释放资源 V操作
sem_v(id);
}
sem_get_value(id,0);
sleep(2);
sem_del_sem();
return 0;
}
POSIX信号量:
- POSIX 信号量是与 System V 信号量相似,但使用更简单的 API。编译的时候需要链接 -pthread
- POSIX 信号量也是计数器,但它使用两个基本操作来操作信号量:初始化和执行 wait 和 post 操作。wait 操作类似于 P 操作,用于申请资源并等待,而 post 操作类似于 V 操作,用于释放资源。
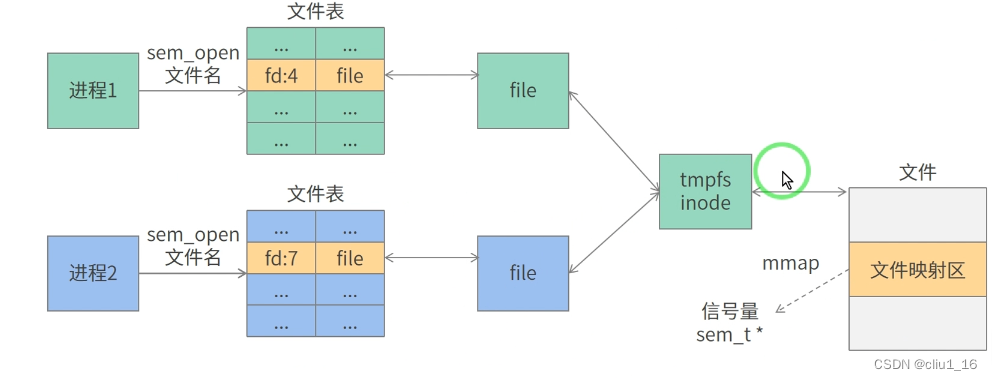
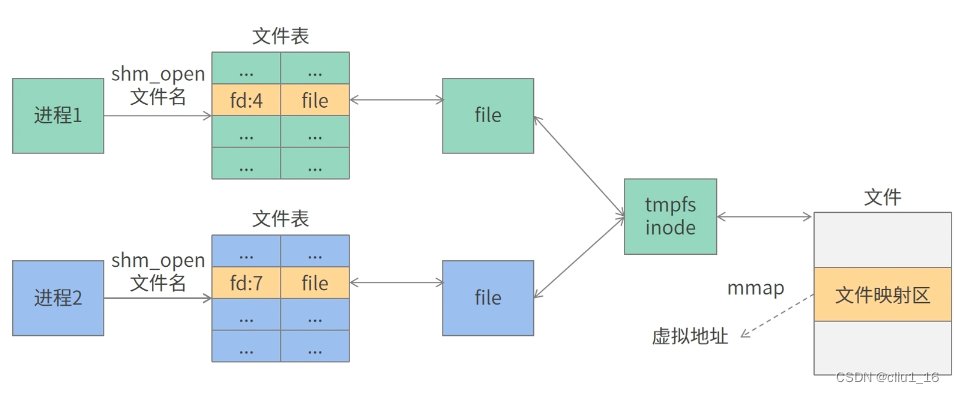
- POSIX信号量有两种类型:命名信号量和无名信号量,分别用于进程和线程的通信。命名信号量是用tmp文件来实现,无名信号量用全局变量实现。
- POSIX信号量由tmpfs文件系统和mmap内存映射共同实现,sem_open函数会创建一个tmpfs文件,然后通过mmap函数将文件进行内存映射,mmap函数调用成功后,将虚拟地址以sem_t*的形式返回给应用层。
为什么无名信号量只能用于线程中?使用无名信号量一般会定义一个全局变量,别的进程是无法访问的,只有线程能用。
sem_open:创建或打开一个命名的信号量的系统调用。命名信号量(用于进程间通信)。
sem_init:初始化一个无名信号量。(用于线程间通信)。
sem_close:关闭一个打开的信号量。
sem_unlink:删除一个已命名的信号量。
命名信号量
#include <iostream>
#include <semaphore.h>
#include <unistd.h>
#include<fcntl.h>
#include<sys/stat.h>
using std::cout;
using std::cerr;
using std::endl;
int main(int argc, char* argv[]) {
int mode = atoi(argv[1]);
sem_t *sem= sem_open("/posixSem",O_RDWR|O_CREAT, 0664,0);
if(sem == SEM_FAILED){
cerr << "SEM_FAILED"<<endl;
return -1;
}
while(1){
if(mode==0){
sem_wait(sem); // P
cout<<"sem--"<<endl;
}else{
sleep(1);
sem_post(sem); // V
cout<<"sem++"<<endl;
}
}
// 关闭信号量
sem_close(sem);
sem_unlink("/posixSem");
return 0;
}
无名信号量
#include <iostream>
#include <semaphore.h>
using std::cout;
using std::cerr;
using std::endl;
int main() {
sem_t sem;
// 初始化信号量,第二个参数为0表示信号量在进程内共享,否则在进程间共享
if (sem_init(&sem, 0, 0) == -1) {
std::cerr << "Failed to initialize semaphore\n";
return 1;
}
// 以一定的方式使用信号量,如:
// sem_wait(&sem) // 等待信号量
// sem_post(&sem) // 发送信号量
// 销毁信号量
if (sem_destroy(&sem) == -1) {
std::cerr << "Failed to destroy semaphore\n";
return 1;
}
return 0;
}
共享内存
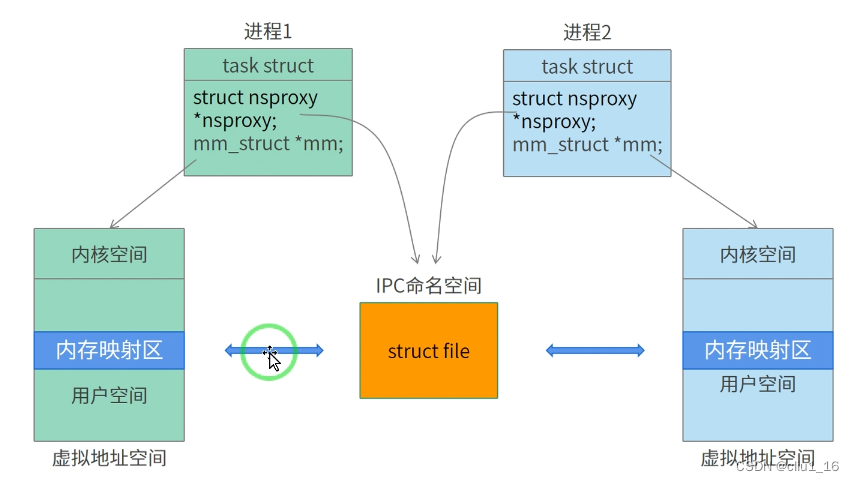
SystemV 内存映射:内存映射是一种将文件系统中的文件映射到进程内存空间的技术。可以像操作内存一样操作文件,而不需要读写操作,可以提高文件的读写效率,减少IO操作,提高系统性能。
#include <sys/mman.h>
// 创建内存映射区
void *mmap(void *addr, size_t length, int prot, int flags, int fd, off_t offset);
// 解除内存映射
int munmap(void *addr, size_t length);
共享内存不同于内存映射区,它不属于任何进程,并且不受进程生命周期的影响。
- 共享内存不同于内存映射区,它不属于任何进程,并且不受进程生命周期的影响。
- 通过调用Linux提供的系统函数就可得到这块共享内存。使用之前需要让进程和共享内存进行关联,得到共享内存的起始地址之后就可以直接进行读写操作了,进程也可以和这块共享内存解除关联, 解除关联之后就不能操作这块共享内存了。
在所有进程间通信的方式中共享内存的效率是最高的。
shmget:创建或获取共享内存
shmat:与共享内存做内存映射的函数
shmdt:将共享内存与当前进程分离。
shmctl:对共享内存段进行操作,如创建、删除获取和修改属性
ipcs -m 查看共享内存
ipcmk - M 4096 共享内存为4096字节
ipcrm -m 2 删除标识为2的共享内存。
内存映射区和共享内存的区别:
- 共享内存只需要一块共享内存区就可以进行进程间通信,内存映射区位于每个进程的虚拟地址空间中,需要关联磁盘文件才能实现进程间数据通信。
- 共享内存效率更高,内存映射区需要文件数据同步,效率较低。
- 共享内存独立于进程,内存映射区属于进程。
- 突发情况下,内存映射区可以数据同步到文件中,共享内存不可以,因为共享内存在内存中。
SystemV 共享内存
#include <iostream>
#include <sys/ipc.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <sys/types.h>
#include <sys/shm.h>
#include <unistd.h>
#include <string.h>
using std::cout;
using std::cerr;
using std::endl;
int main(int argc, char* argv[]) {
int mode = atoi(argv[1]);
key_t shmkey = ftok("./system_v_shm",1); // 产生键值,这个名字一定要和程序名字一样。。
if(shmkey == -1){
perror("ftok");
return -1;
}
// 键值 共享内存大小 权限
int shmid = shmget(shmkey,1024,0644|IPC_CREAT);
void* addr = shmat(shmid,NULL,0);
if(addr == (void*)-1){
cerr<<"shmat"<<endl;
return -1;
}
int i=0;
while(1){
if(mode==0){
char rbuf[1024] = {0};
memcpy(rbuf,addr,1024);
cout<<rbuf<<endl;
}else{
char wbuf[1024] = {0};
sprintf(wbuf,"%d",i++);
memset(addr,0,1024);//清空
memcpy(addr,wbuf,strlen(wbuf));
sleep(1);
}
}
shmctl(shmid,IPC_RMID,NULL); //删除共享内存
return 0;
}
POSIX共享内存:也是通过mmap函数实现,编译的时候需要加一个rt的库,-lrt。
shm_open函数创建一个共享内存对象。
shm_unlink关闭共享内存。
ftruncate函数设置共享内存大小。
mmap函数将共享内存映射到进程的地址空间中
#include <iostream>
#include <sys/ipc.h>
#include <sys/types.h>
#include <unistd.h>
#include <string.h>
#include <sys/mman.h>
#include <sys/stat.h> /* For mode constants */
#include <fcntl.h> /* For O_* constants */
using std::cout;
using std::cerr;
using std::endl;
#define SHM_PATH "./system_v_shm"
int main(int argc, char* argv[]) {
int mode = atoi(argv[1]);
int fd = shm_open(SHM_PATH,O_RDWR|O_CREAT,0644); //打开或创建共享内存
if(fd==-1){
perror("shm_open");
return -1;
}
int ret = ftruncate(fd,4096); //设置共享内存大小
if(ret==-1){
perror("ftruncate");
return -1;
}
void* addr = mmap(NULL,4096,PROT_READ|PROT_WRITE,MAP_SHARED,fd,0); // 内存映射
if(addr == (void*)-1){
cerr<<"mmap"<<endl;
return -1;
}
int i=0;
while(1){
if(mode==0){
//读内存
char rbuf[1024] = {0};
memcpy(rbuf,addr,1024);
cout<<rbuf<<endl;
}else{
char wbuf[1024] = {0};
sprintf(wbuf,"%d",i++);
memset(addr,0,1024);//清空
memcpy(addr,wbuf,strlen(wbuf));
}
sleep(1);
}
munmap(addr,4096); //解除内存映射
shm_unlink(SHM_PATH);// 删除内存映射
return 0;
}
信号
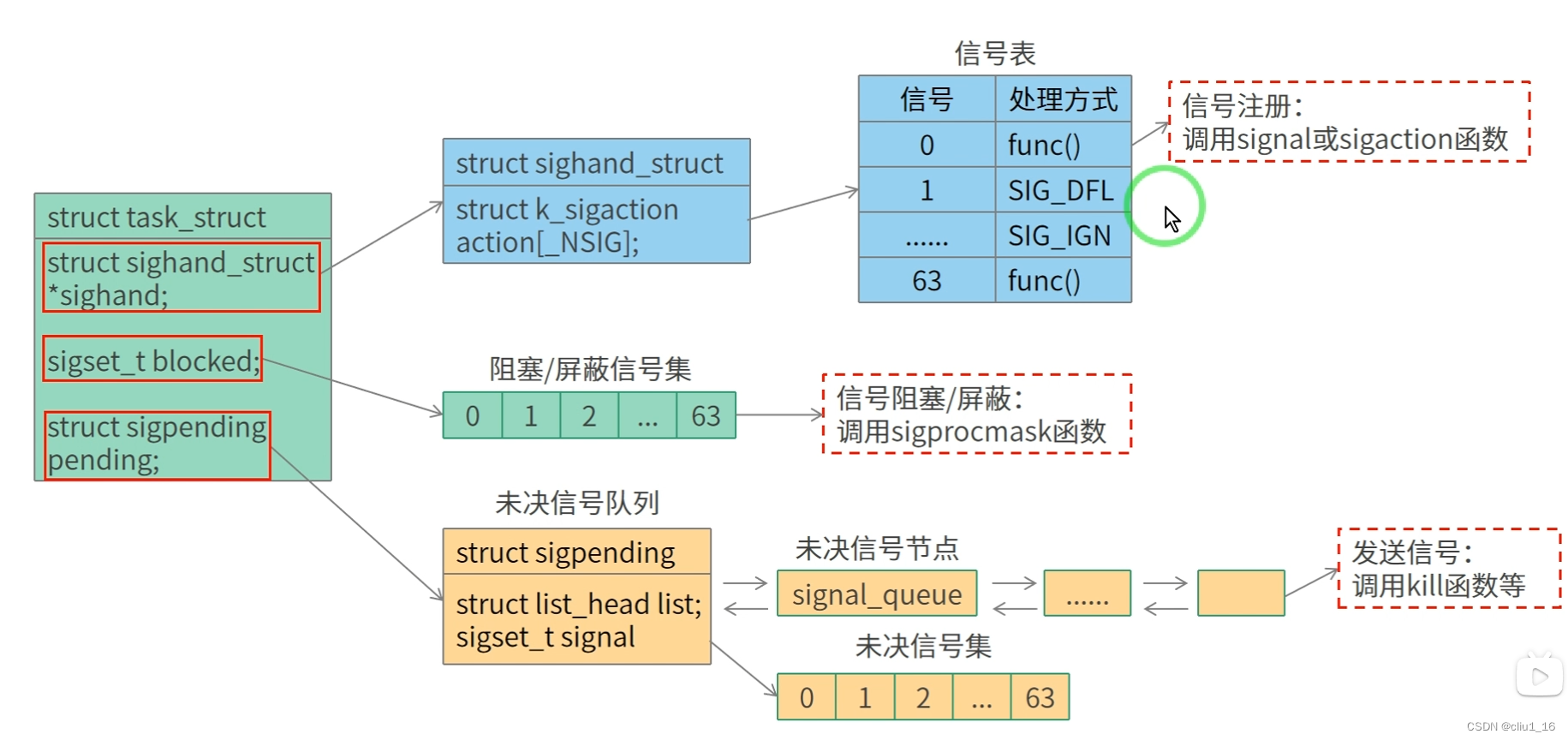
Linux内核中实现信号的关键是信号处理函数和信号传递,每个进程都有一个信号来表示该进程对不同信号的处理情况。
当一个进程向另一个进程发送信号时,内核会将信号添加到目标进程的信号队列中。
信号产生:可以由多种事件触发,如硬件中断,软件异常,用户自定义信号灯。产生信号以后就会进行信号传递,处理,终止。
Linux每个进程都会维护一张信号表,信号表记录了每个信号和信号处理方法,用户调用signal或sigaction函数可以修改函数处理方法。
signal函数:捕捉产生的信号,并将信号的处理函数设置为handler
sigaction:捕捉产生的信号,注册和处理信号处理器
SIGCHLD 信号:子进程退出,暂停或暂停恢复运行的时候,会给父进程一个SIGCHLD信号。
Linux信号的三种状态:产生,未决,递达。
kill:杀死进程的信号
raise:给当前进程发送指定的信号
abort:给当前进程发送一个固定信号 (SIGABRT),杀死当前进程。
alarm:定时器,单词定时信号,完成时发射一个信号。
settimer:周期性触发信号。
信号集函数:
sigprocmask:将信号加到阻塞信号集 or 解除 or 覆盖
sigpending:读取未决信号集。
参考列表
https://www.bilibili.com/video/BV1ob4y1u7ZL/
https://subingwen.cn/linux/pipe/
https://zhuanlan.zhihu.com/p/672264623

















 1475
1475

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









