



 3D技术在教学中的应用极大地提升了学习效率。通过构建获得直接经验的学习环境,学生可以更直观地理解事物的内部结构和工作原理。3D技术不仅改变了教学形式,使其更加生动形象,还促进了学生主动学习和互动交流。此外,3D技术还能帮助教师创新教学模式,提高教学质量。
3D技术在教学中的应用极大地提升了学习效率。通过构建获得直接经验的学习环境,学生可以更直观地理解事物的内部结构和工作原理。3D技术不仅改变了教学形式,使其更加生动形象,还促进了学生主动学习和互动交流。此外,3D技术还能帮助教师创新教学模式,提高教学质量。
在3D技术飞速发展的今天,3D教学具有美好的前景,3D技术在知识的呈现、学习情境的创设方面有着无与伦比的优势。在实际教学过程中,运用3D技术可以激发学生的求知欲、为学生构建可获得直接经验、主动参与的学习环境,充分激发学生的想象力、培养学生自主写作学习的能力,更能辅助教师进行高效率的教学活动。
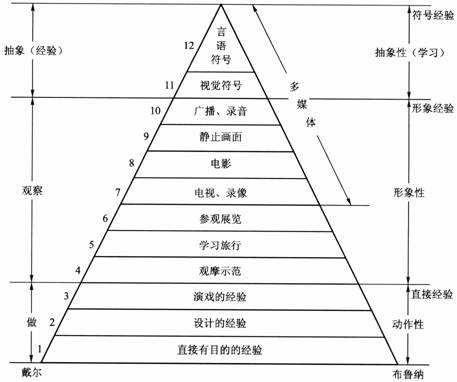
首先从学生学习的角度,3D技术的应用可以最大程度的构建获得直接经验的环境,学习环境直接影响学习效率。根据美国视听专家埃德加·戴尔提出“经验之塔”理论,人类认知规律是由简单向复杂、由形象逐渐到抽象、形象和抽象相互结合。在学生学习过程中实际也是对只是内容的一个认知过程,符合认知规律,越是直接具体的经验,就越易于学生学习。在教学中应用3D扫描技术,可以完美演进事物从形象到抽象的一整个过程,结合3D影像技术,就能最大程度地构建获得直接经验的学习环境。学生们通过3D影像对事物的内部结构和工作原理会有更加直观的观念。
其次,为学生提供主动体验学习过的情景。采用3D技术进行教学在外在形式上有了重大突破,它由原来的平面影像转变为更加生动形象的3D影像,对学生来说,它能长时间调动学生学习的积极性和学生的注意力,大大提高学习效率。再者,在内在结构上,更多地注重学生的自学,增添了更多的互动环节,不仅仅是师生互动,还有更多的人机交互和学生之间的互动交流。
此外,采用3D技术进行授课也会促使教学模式产生积极的变化。在3D教学模式下,学生不仅是被动的从教室那里听取知识,学习过程中加入了更多动态元素,生动形象,能够让学生亲身体验这一过程,加深了学生对知识的印象,也增加了学生的能动性和对学习的兴趣,从而提升学生的学习效率。教师转化教学模式,从传统教学模式转变成适合3D教学的模式。在这个过程中,教师不断自主探索创新,不仅加深了对3D教学的理解,也逐渐完善出符合未来教育的教学模式和理念。
知象光电的3D教育实施方案中,依托知象光电Scanking系列桌面三维扫描仪、三维后处理软件、3D打印机等快速成型设备,配备专业级的应用讲解课件,对高教、普教和学前教育等不同教育层级的3D技术教学需求,均给予个性化的响应和满足,可以有效促进3D技术教育课程在全领域的普及和转化。

采用了3D技术的教学在教学内容和形式上有了重大突破,它由原来的平面影像转变为更加生动形象的3D影像;不仅如此,在某些场景下,通过采用三维扫描仪获取模型,并通过老师的模型变更,配合3D打印机输出演进的模型,深入掌握特定事物的变更规律。其次,在教学的内在结构上,更多的注重学生的自学和参与感培养,增添了更多的互动环节。虽然这会增加教师的负担,但从长远看,它利于教师自身能力的发展,扩展了教师的教学视野;同时,也在培养学生的动手能力上有很大的突破。与传统的教学手段相比,通过3D教学培养出的学生,除了在专业知识方面有更加深刻的理解和记忆外,在思维活跃、课外知识积累、动手能力上也有较大优势,有利于学生未来的发展。

















 1426
1426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









