



 铜石岭位于广西北流市,是一座融合丹霞地貌与喀斯特地貌的自然奇观。这里不仅有奇山、奇石、奇洞,还有悠久的铜矿冶炼历史,是古代铜鼓的重要产地之一。如今已开发为旅游景区。
铜石岭位于广西北流市,是一座融合丹霞地貌与喀斯特地貌的自然奇观。这里不仅有奇山、奇石、奇洞,还有悠久的铜矿冶炼历史,是古代铜鼓的重要产地之一。如今已开发为旅游景区。
我国是一个历史悠久、地大物博的伟大国度,这里有很多壮美的山川和神奇的景观,长江三峡、桂林山水、九寨黄龙、三山五岳、雪域高原、大漠孤烟、辽阔草原……太多闻名世界的风景名胜。但也有很多尚不闻名,却依然神奇无比的地方,比如今天渝帆要介绍的铜石岭。
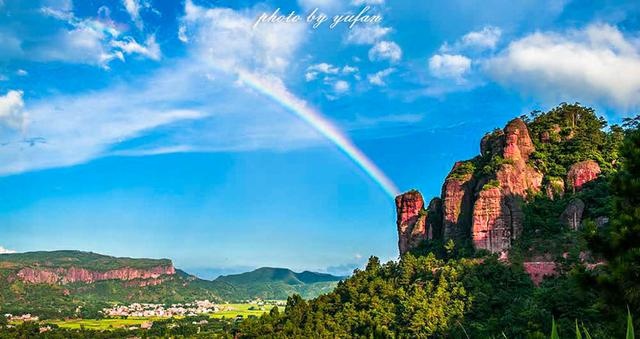
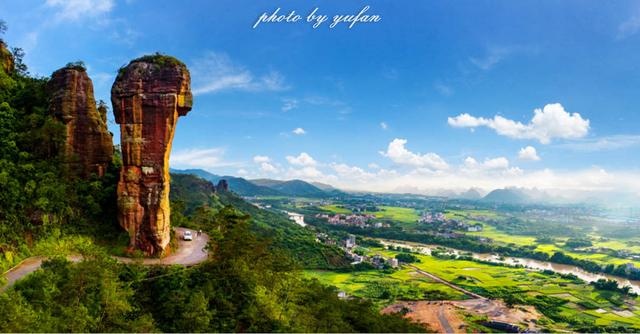
铜石岭有很多神奇的地方,比如说它是世界上唯一融丹霞地貌与卡斯特地貌于一体的自然奇观。
中国的丹霞美景很多,比如说丹霞地貌的命名地——广东丹霞山、强抬升深切割高原峡谷曲流的代表——福建泰宁、密集型圆顶丹霞峰丛代表——湖南崀山、疏散形丹霞峰林的代表——江西龙虎山、高位孤峰型地貌代表——浙江江郎山等,这些都是世界闻名的地质遗产,名气都比铜石岭大得多。
中国的卡斯特地貌分布也非常广,其中云南石林、贵州荔波、重庆武 隆、广西桂林、贵州施秉、重庆金佛山和广西环江等七个地方还成功的联合申报了中国南方喀斯特世界地质遗产。但说到喀斯特,却没有几人会想到名不见经传的铜石岭。
隆、广西桂林、贵州施秉、重庆金佛山和广西环江等七个地方还成功的联合申报了中国南方喀斯特世界地质遗产。但说到喀斯特,却没有几人会想到名不见经传的铜石岭。
然而,铜石岭就是这样一个神奇的地方,竟然在亿万年前的地质变化中,意外的形成了丹霞地貌和喀斯特地貌两种地质奇观,这在世界范围内也不是多见的奇迹。
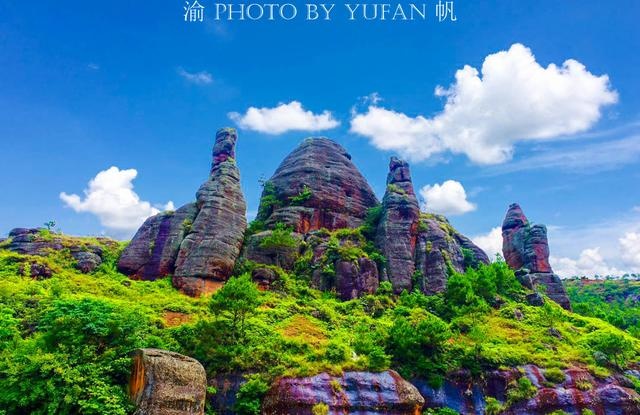
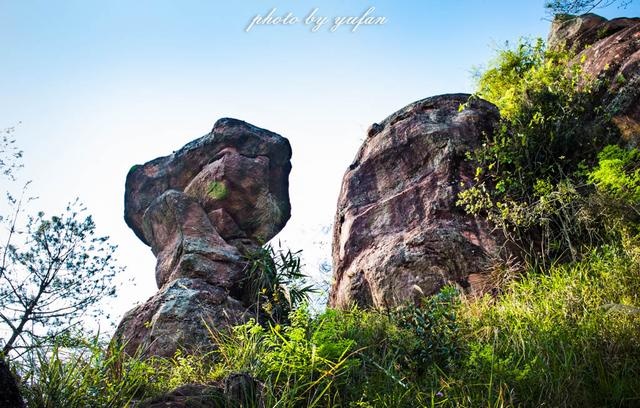
讲了这么久,铜石岭在什么地方呢?它位于广西壮族自治区玉林北流市的东郊,分大小两山,圭江自南而北饶过山前,山层变耸秀、巍峨壮观,石皆紫铜色,有的兀然独立,骨骼清奇;有的苍茫一片,气势雄浑。这些令人叹为观止的奇峰怪石,丛立造型各异,千姿百态、栩栩如生。
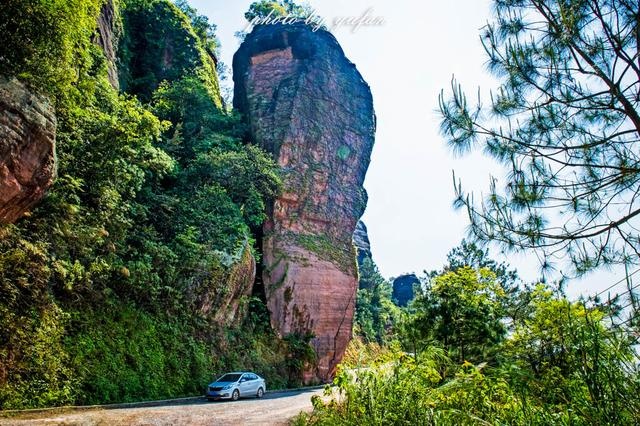
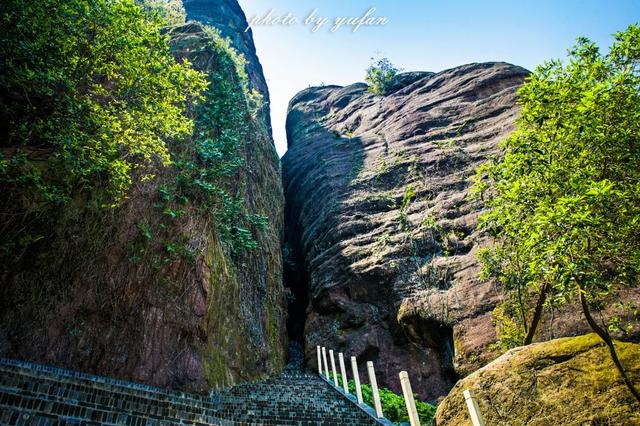
据相关专家考证,铜石岭是在亿万年前海底火山爆发、地壳隆起而形成的一座奇特山岭,地质结构十分复杂:基部是水成岩(石灰石),中部是火成岩(紫红石),顶部是风化石(泥土),集许多深洞、石岩、悬崖、峭壁在一起,自然形成的铜石奇景就有108个,还有七洞、十岩、十泉、三池,加上凉洞、门头洞、三娘洞、鸭儿洞、石花厅、会仙岩、千佛岩、人字岩等,都很有观赏价值。
不仅如此,铜石岭还是一个历史悠久的铜矿冶炼地,早在汉朝时期,南越王赵陀便在这里开矿炼铜,估计这也是铜石岭这个名称的来源。而北流出土的上百面古代大型铜鼓,都是出自此山,其中还有一面是全球最大的铜鼓王。
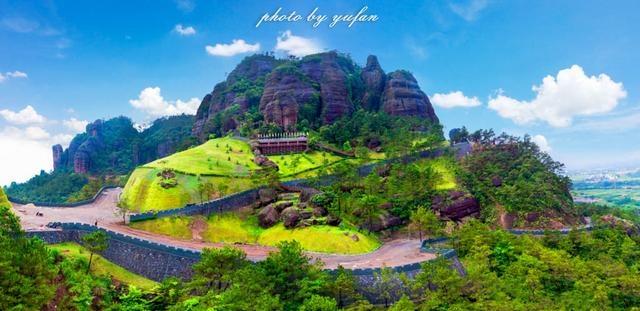
这个地方之前只有当地人知道,根本就不是景区,但前两年被当地人民重视起来,现在已经开发成旅游景点,要不然还是养在深山人未识。不过即便现在已经是景区了,还并没有太多商业化的痕迹,只是对参观的道路进行必要的规范,以确保游览安全而已。
景区内,各种山峰千姿百态,有的像蘑菇,有的像骆驼,有的像蟒蛇,三分形象,七分想象。

这个景区的总面积约40平方公里,它的总体特征被当地人总结为“三奇、三美、三地”。
其中,“三奇”指的是奇山、奇石、奇洞;
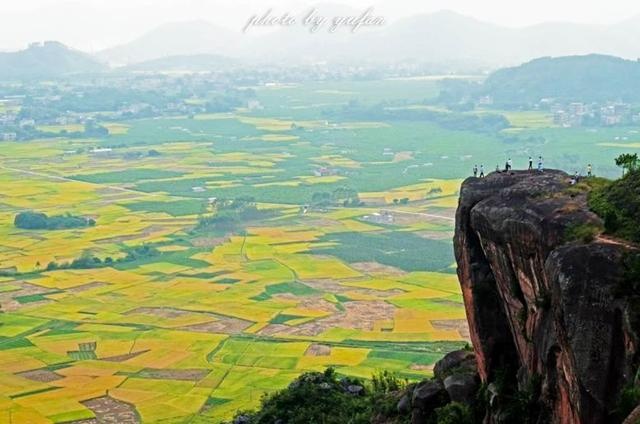
“三美”便是指壮美的自然山水、秀美的乡村田园、优美的生态环境;
“三地”则是指古老的汉代冶铜铸造地、隐逸修仙的洞天福地、最大的铜鼓出土地。
这个景区大家听说过吗?去到广西了,有没有兴趣去看看呢?

















 1735
1735

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









