




 本文详细分析了goto语句的副作用及其对程序结构的影响,并对比了void在函数声明中的使用,包括func(void)与func()的区别,以及void修饰指针的应用。
本文详细分析了goto语句的副作用及其对程序结构的影响,并对比了void在函数声明中的使用,包括func(void)与func()的区别,以及void修饰指针的应用。
goto和void分析
1、goto关键字副作用分析
goto语句会破坏程序的结构
程序示例:
#include <stdio.h>
#include <malloc.h>
void func(int n)
{
int* p = NULL;
if( n < 0 )
{
goto STATUS;
}
p = (int*)malloc(sizeof(int) * n);
STATUS:
p[0] = n;
free(p);
}
int main()
{
printf("begin...\n");
printf("func(1)\n");
func(1);
printf("func(-1)\n");
func(-1);
printf("end...\n");
return 0;
}
输出结果为:
2、void的意义
(1)func(void)和func()的区别
#include <stdio.h>
void func()
{
}
int main(void)
{
func(1,2,3);
return 0;
}
能够编译通过,func()代表能够传递任意参数,而func(void)代表不能传递参数;
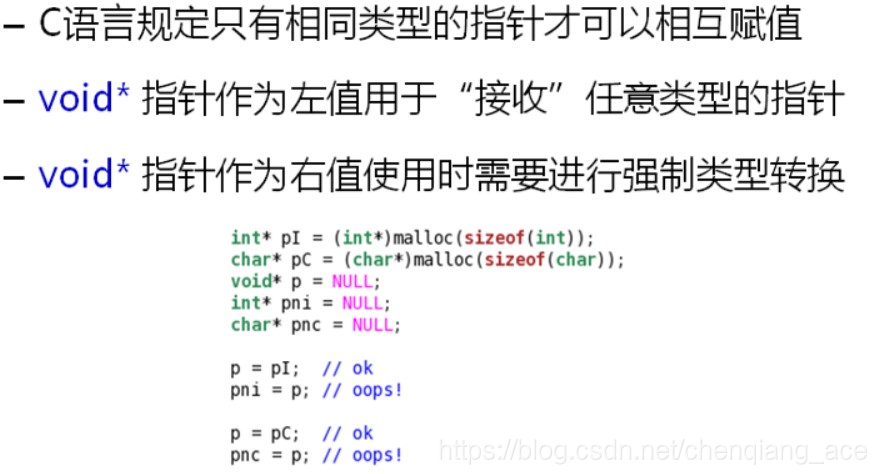
(2)void主要用来修饰函数返回值和参数的,不可以修饰变量,但可以修饰指针;
#include <stdio.h>
int main(void)
{
void var;
void array[10];
void* p = NULL;
return 0;
}
输出结果为:
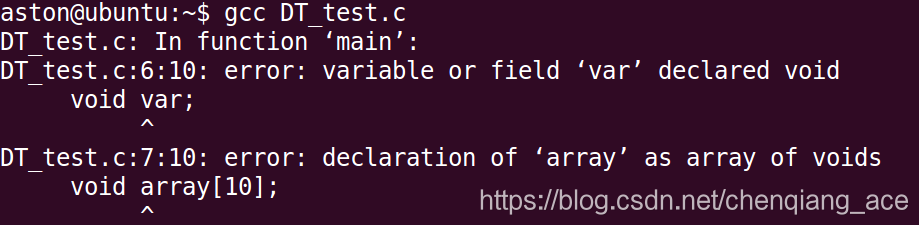
只有两个错误,证明void可以修饰指针;
(3)void类型大小是多少?
- ANSI C:标准C语言规范
- 扩展C:在ANSI C的基础上进行了扩充
#include <stdio.h>
int main(void)
{
printf("sizeof(void) == %d\n",sizeof(void));
return 0;
}
在gcc编译器上输出结果为:


(4)void指针的意义
实例分析:
memset函数的实现
#include <stdio.h>
void MemSet(void* src, int length, unsigned char n)
{
unsigned char* p = (unsigned char*)src;
int i = 0;
for(i=0; i<length; i++)
{
p[i] = n;
}
}
int main(void)
{
int a[5] = {1,2,3,4,5};
int i = 0;
MemSet(a, sizeof(a), 0);
for(i=0; i<5; i++)
{
printf("%d\n", a[i]);
}
return 0;
}
输出结果为:
3、小结

















 1515
1515

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









