



函数
- 函数:定义好的、可重用的功能模块
- 定义函数:将一个模块的算法用 C++描述出来
- 函数名:功能模块的名字
- 函数的参数:计算所需要的数据和条件
- 函数的返回值:需要返回的计算结果
函数的调用
调用函数需要先声明函数原型
- 若函数定义在调用点之前,可以不另外声明;
- 若函数定义在调用点之后,必须要在调用函数前声明函数原型:
- 函数原型:类型标识符 被调用函数名(含类型说明的形参表)
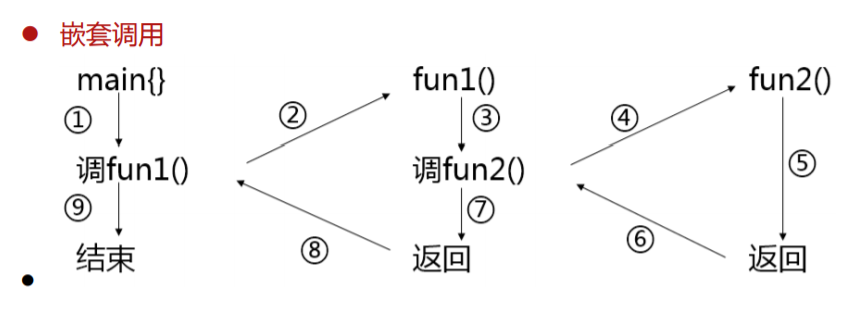
函数的嵌套调用
函数直接或间接地调用自身,称为递归调用。
内联函数
- 声明时使用关键字 inline。
- 编译时在调用处用函数体进行替换,节省了参数传递、控制转移等开销。
注意:
- 内联函数体内不能有循环语句和 switch 语句;
- 内联函数的定义必须出现在内联函数第一次被调用之前;
- 对内联函数不能进行异常接口声明。
constexpr 函数
constexpr 函数语法规定
- constexpr 修饰的函数在其所有参数都是 constexpr 时,一定返回 constexpr;
- 函数体中必须有且仅有一条 return 语句。
constexpr 函数举例
- constexpr int get_size() { return 20; }
- constexpr int foo = get_size(); //正确:foo 是一个常量表达式
带默认参数值的函数
默认参数值的说明次序
- 有默认参数的形参必须列在形参列表的最右,即默认参数值的右面不能有无默认值的参数;
- 调用时实参与形参的结合次序是从左向右。
例:
- int add(int x, int y = 5, int z = 6);//正确
- int add(int x = 1, int y = 5, int z);//错误
- int add(int x = 1, int y, int z = 6);//错误
函数重载
函数重载的概念
- C++允许功能相近的函数在相同的作用域内以相同函数名声明,从而形成重载。方便使用,便于记忆。
注意事项
- 重载函数的形参必须不同:个数不同或类型不同。
- 编译程序将根据实参和形参的类型及个数的最佳匹配来选择调用哪一个函数。
- 不要将不同功能的函数声明为重载函数,以免出现调用结果的误解、混淆。
rand 函数
- 函数原型:int rand(void);
- 所需头文件:<cstdlib>
- 功能和返回值:求出并返回一个伪随机数
srand 函数
- void srand(unsigned int seed);
- 参数:seed 产生随机数的种子
- 所需头文件:<cstdlib>
- 功能:为使 rand()产生一序列伪随机整数而设置起始点。使用 1 作为 seed 参数,可以重新初化 rand()。
C++系统函数
系统函数
C++的系统库中提供了几百个函数可供程序员使用,例如:
- 求平方根函数(sprt)
- 求绝对值函数(abs)
使用系统函数时要包含相应的头文件,例如cmath。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









