






 TrajNet++是一个针对自动驾驶和服务机器人等领域的轨迹预测基准测试平台,着重于拥挤场景中的人际交互建模。该平台提供大量轨迹数据和统一的评估系统,以便对不同方法进行公平比较。主要指标包括平均位移误差(ADE)、最终位移误差(FDE)、预测碰撞(Col-I)和地面真实碰撞(Col-II),以及多模态预测的Topk_ADE、Topk_FDE和平均负对数似然(NLL)。这些指标用于衡量预测轨迹的准确性和多样性。
TrajNet++是一个针对自动驾驶和服务机器人等领域的轨迹预测基准测试平台,着重于拥挤场景中的人际交互建模。该平台提供大量轨迹数据和统一的评估系统,以便对不同方法进行公平比较。主要指标包括平均位移误差(ADE)、最终位移误差(FDE)、预测碰撞(Col-I)和地面真实碰撞(Col-II),以及多模态预测的Topk_ADE、Topk_FDE和平均负对数似然(NLL)。这些指标用于衡量预测轨迹的准确性和多样性。
概述
由于自动驾驶和服务机器人等人工智能新兴应用的需求不断增长,拥挤场景中的轨迹预测已成为近年来的一个重要话题。轨迹预测的一项重要挑战是有效地建模社交互动。在过去的几年中,已经提出了几种新颖的方法。然而,这些方法已经在可用数据的不同子集上进行了评估,因此很难客观地比较结果。
TrajNet++,是一个大规模的以交互为中心的基于轨迹的基准测试。不仅包含适当的轨迹采样数据,而且提供统一的广泛评估系统来测试收集的方法以进行公平比较。
标注格式
场景
{“scene”: {“id”: 266, “p”: 254, “s”: 10238, “e”: 10358, “fps”: 2.5, “tag”: 2}}
id: scene id
p: pedestrian ID
s, e: starting and ending frames id of pedestrian “p”
fps: frame rate.
tag: trajectory type. Discussed in detail below.
轨迹
{“track”: {“f”: 10238, “p”: 248, “x”: 13.2, “y”: 5.85, “pred_number”: 0, “scene_id”: 123}}
f: frame id
p: pedestrian ID
x, y: x and y coordinates in meters of pedestrian “p” in frame “f”.
pred_number: prediction number. This is useful when you are providing multiple predictions as opposed to a single prediction. Max 3 predictions allowed
scene_id: This is useful when you are providing predictions of other agents in the scene as opposed to only primary pedestrian prediction.
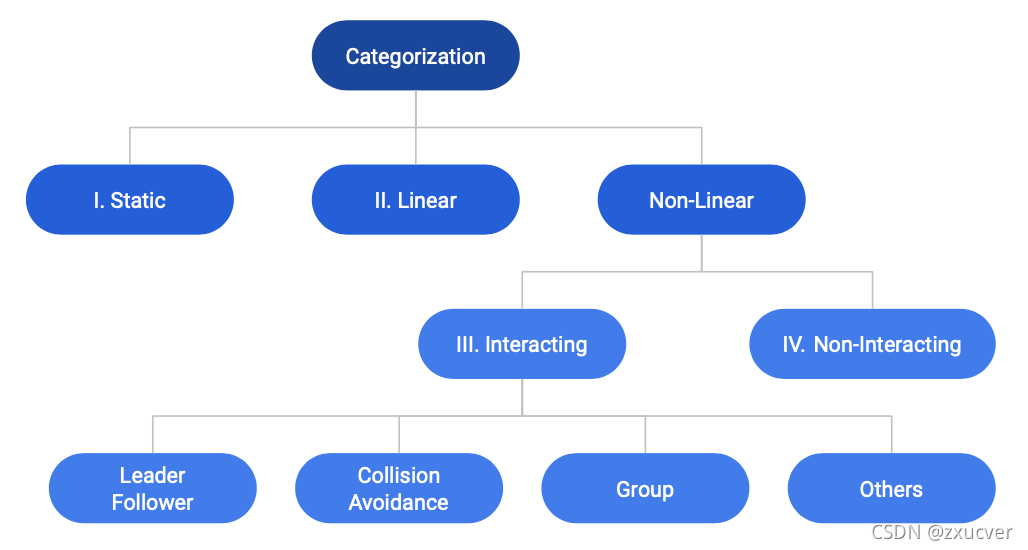
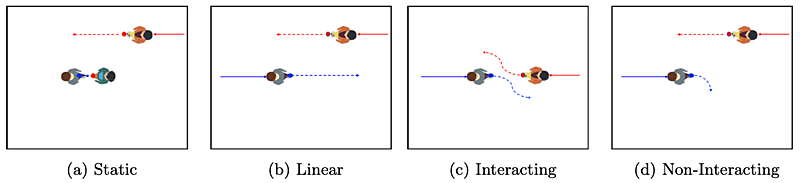
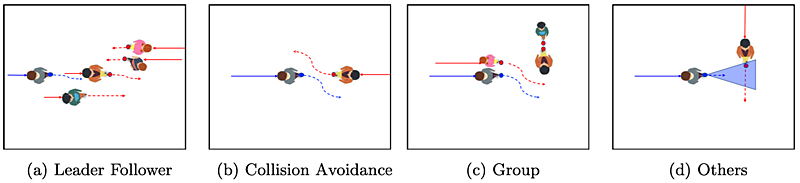
轨迹分类
评价
UNIMODAL METRICS: SINGLE PREDICTION
Average Displacement Error (ADE): Average L2 distance between the ground truth and prediction of the primary pedestrian over all predicted time steps. Lower is better.
Final Displacement Error (FDE): The L2 distance between the final ground truth coordinates and the final prediction coordinates of the primary pedestrian. Lower is better
Prediction Collision (Col-I): Calculates the percentage of collisions of primary pedestrian with neighbouring pedestrians in the scene. The model prediction of neighbouring pedestrians is used to check the occurrence of collisions. Lower is better.
Ground Truth Collision (Col-II): Calculates the percentage of collisions of primary pedestrian with neighbouring pedestrians in the scene. The ground truth of neighbouring pedestrians is used to check the occurrence of collisions. Lower is better.
MULTIMODAL METRICS: MULTIPLE PREDICTION
Topk Average Displacement Error (Topk_ADE): Given k output predictions for an observed scene, the metric calculates the ADE of the prediction which is closest to the groundtruth trajectory in terms of ADE. Lower is better. In this challenge, k=3
Topk Final Displacement Error (Topk_FDE): Given k output predictions for an observed scene, the metric calculate the FDE of the prediction which is closest to the groundtruth trajectory in terms of ADE. Lower is better. In this challenge, k=3
Average NLL (NLL): Given n output predictions for an observed scene, the metric calculates the average negative log-likelihood of groundtruth trajectory in the model prediction distribution over the prediction horizon. Higher is better. In this challenge, n=50.


















 1203
1203

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









