



 本文详细介绍了3D结构光的原理,从三维空间点到二维像素点的转换过程,涉及相机坐标系、世界坐标系的关系,以及双目系统和编码结构光在匹配像素点中的应用,阐述了光路可逆的单目结构光概念。
本文详细介绍了3D结构光的原理,从三维空间点到二维像素点的转换过程,涉及相机坐标系、世界坐标系的关系,以及双目系统和编码结构光在匹配像素点中的应用,阐述了光路可逆的单目结构光概念。
1概述:
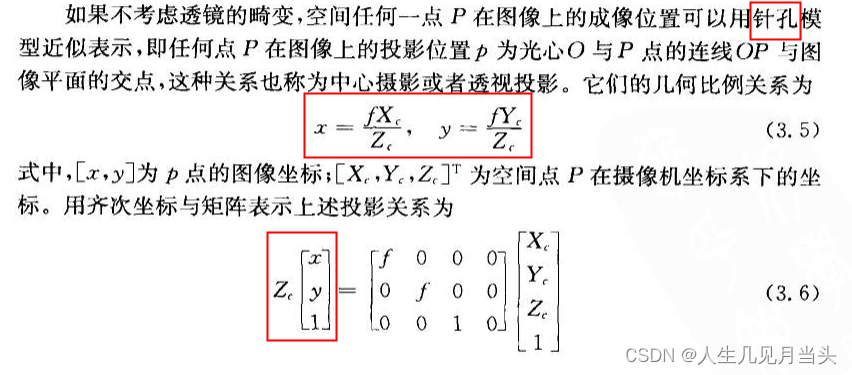
如何描述二维相平面中的一个点?
该二维相面,即 三维空间 的一个点

两个船桨位于 水面(二维平面)的点,通过支架(光心),两桨(光机相机)相交于一三维空间点的一点。
水面表示相机面和光机面;
可以想象,船桨交点的任意空间位置,有唯一的 船桨(两桨)水面位置,即两个二维面上的点表示了任意三维的点。
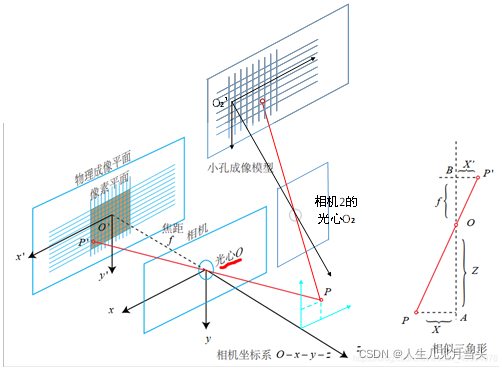
某一固定桨位的侧视图:

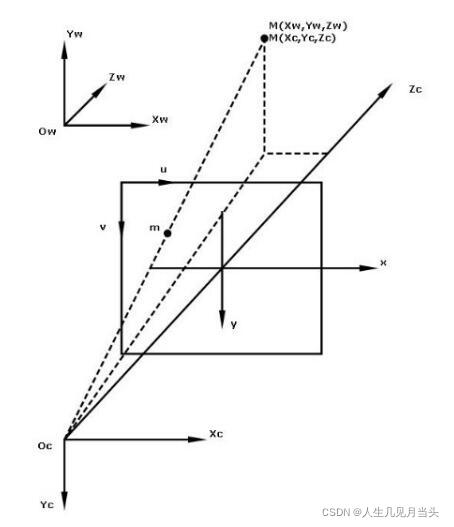
如何描述空间中的一个点?坐标系、两空间线(矢量)相交
如何确认一条空间线?需要空间中的两个点(像素平面的点和光心)
所在线表示: p=q +λ v ;p为组成该线的点,q为起始点,λ为缩放长度,v为向量(u,v,-f)

光心点坐标(0,0,0)(在相机坐标系下),像素平面点(u,v,z),z=-f,则得到矢量线方向:

(u-0,v-0,-f-0),即(u,v,-f),则线(上图红色线 PP')变为
p(Xc,Yc,Zc)=q(0,0,0)+λ(u,v,-f)
得到
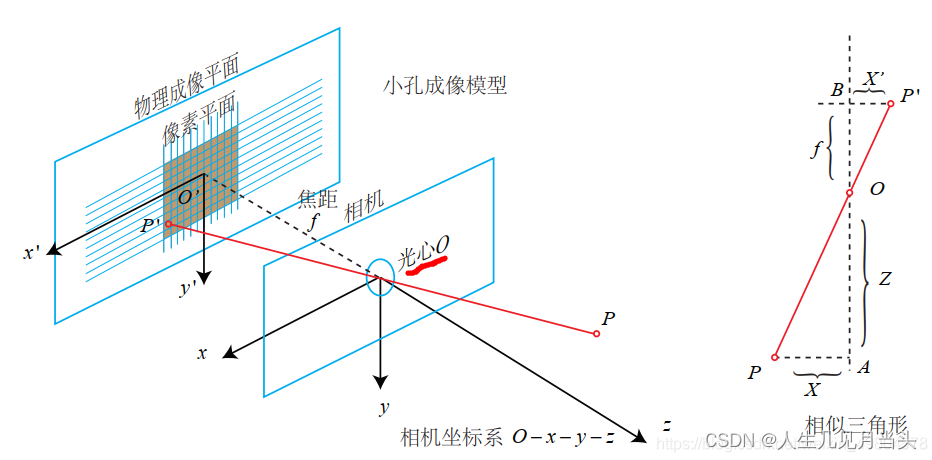
(Xc,Yc,Zc)= λ(u,v,-f)
得到
u=f/Zc *Xc
该结果和小孔成像模型的结果一致。
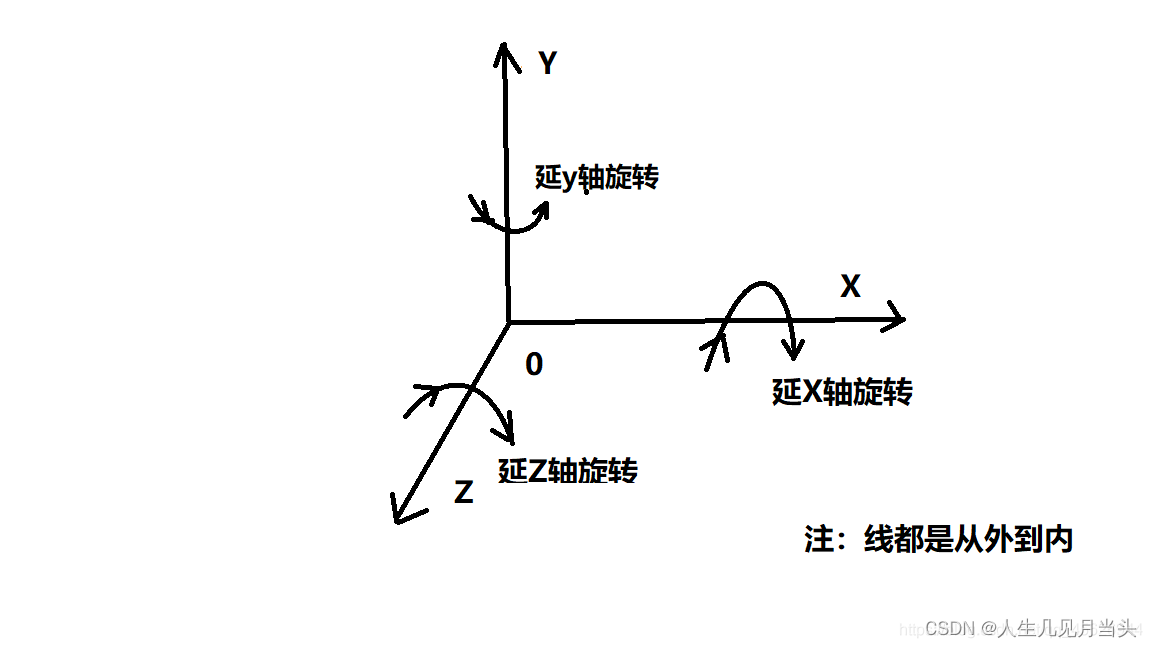
又立体空间中的两个 空间点到各自坐标原点的线段(即坐标系)可以通过“旋转 R+平移 T”实现(按上面的直线矢量模型,旋转改变v,平移改变q):
p(Xc,Yc,Zc,1)=[R T] Pw(Xw,Yw,Zw,1)
代入,得到最终的线描述方程组:
[R T](Xw,Yw,Zw,1)= λ(u,v,-f,1)
未知数是λ Xw Yw Zw四个,方程只有3个,解不出;从物理意义看,空间中,一条线无法确定一个点,所以有λ 这个自由度 。
引入另一根直线表示: [R2 T2](Xw,Yw,Zw,1)= λ2(u2,v2,-f2,1)
未知数是λ1, λ2, Xw Yw Zw 5个,6个方程,有解。
(为了书写方便,有些数学推论不严谨)
参考文献:
Build Your Own 3D Scanner:
3D Photography for Beginners
另一种解释(从维度):
1概述:
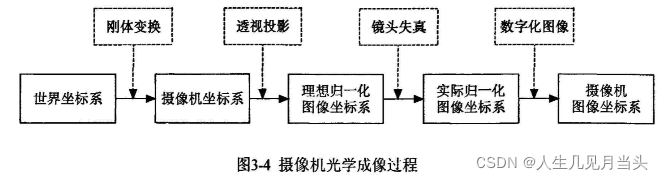
空间点到像素点,要经历3个步骤:
1、最重要:空间点到平面点,相机坐标系到像素平面,三维到二维
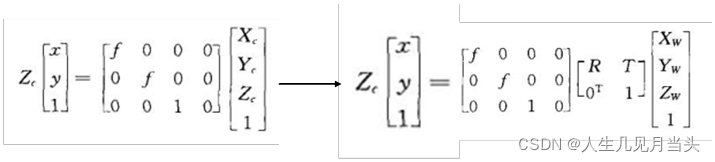
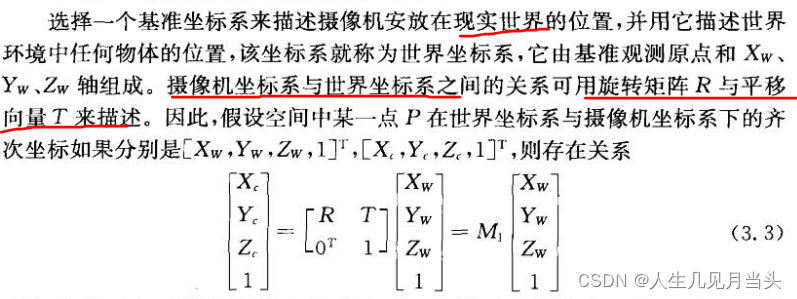
2、次重要:空间点到空间点,世界坐标系到相机坐标系,三维到三维:Pc=[R T] Pw
3、次次重要:平面点到平面点,像素平面到理想像素平面,二维到二维(可以先不考虑)
未知数是Zc Xw Yw Zw四个,方程只有3个,解不出。
引入直线2,Zc不一样,但是Xw Yw Zw一样,5个未知数,6个方程,可以解出。
(计算过程中,把Zc消除,方程变为2个,即3个未知数对2个方程;两线则是3个未知数,对应4个方程)
非理想情况,需要考虑像素平面的问题以及镜头的畸变,完善之:
2三维到二维:
3三维:
相机坐标系和世界坐标系的关系(R和T):
结论:把P点从相机坐标系改为世界坐标系表示:
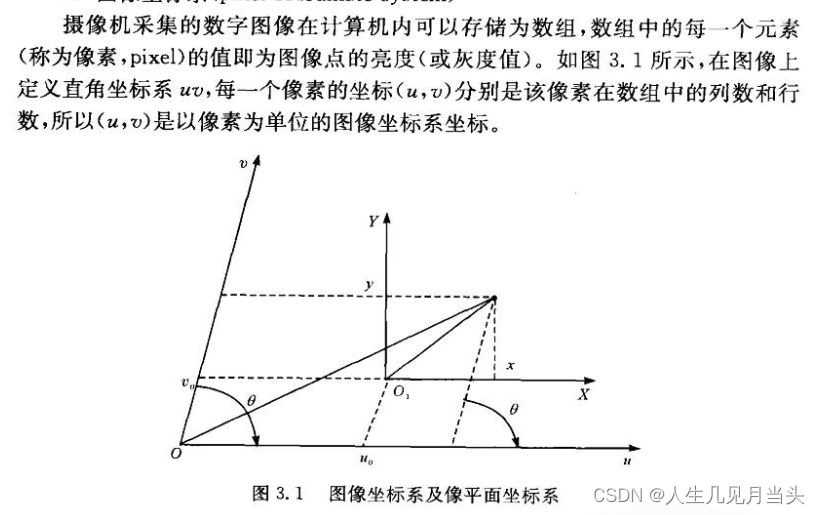
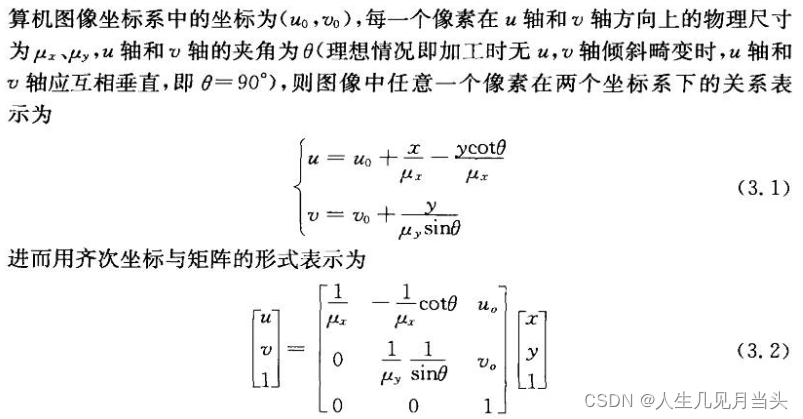
4二维:
像素坐标系和 成像坐标系关系:
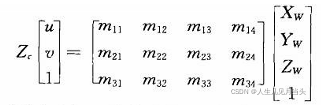
5三个转换综合:
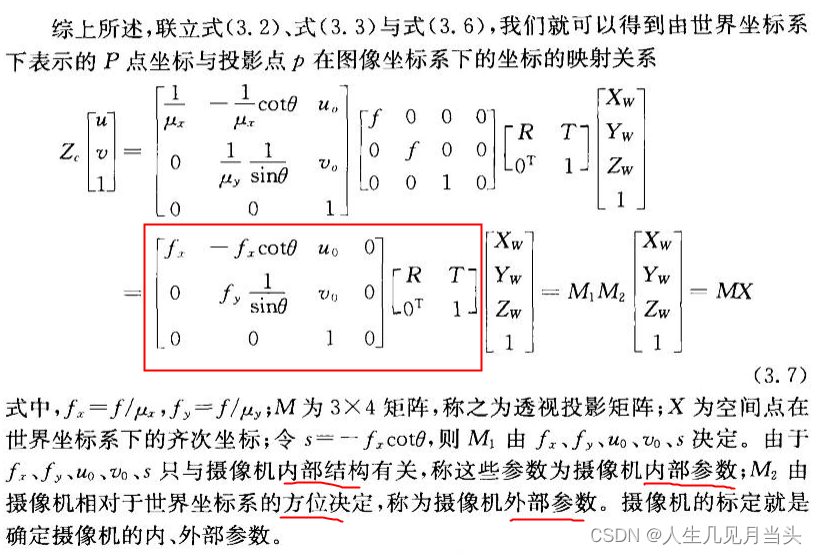
同样的,能得到一个投影仪的式子:
相机一:
未知数是Zc Xw Yw Zw四个,方程只有3个,解不出。
计算过程中,把Zc消除,方程变为2个,即3个未知数对2个方程;两线则未知数3个不变,对应4个方程:

再增加一组相机,即可得到4个方程。
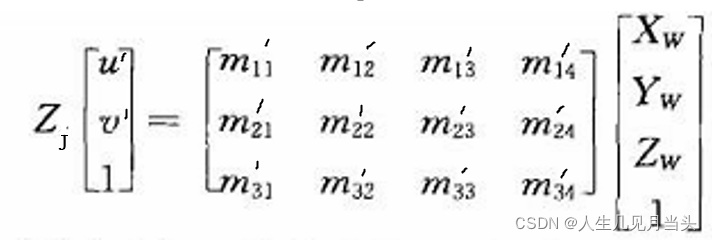
相机二: 得到

已知M 、M' 、 u 、v 、u' 、 v',未知: Xw Yw Zw
可求。
以上是双目系统的成像。
(在标定时需要6个点(6x2=12)。用最小二乘法能得求出 m 矩阵12个值。
多点多图可降低误差;)
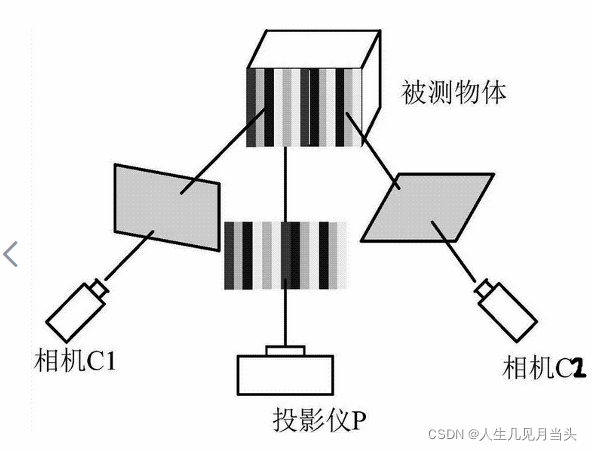
6 如何将u、v 和u' 、 v'对应?
新的问题是,如何确定XYZ对应到两个相机的点P1和P2 ?
答案是,编码结构光:

一般的平面图上,确定一点,需要知道行列的位置。比如,22行,18列。
可用二进制表示为:1_0110行,1_0010列
每张图表示1bit,则行列各需要5张图:

通过类似二进制数的表示方式,每一bit对应一张图,10bit能区分出1024个像素点;
横竖各10张图,则能标记出1024*1024的分辨率。
(为了降低误码率,二进制改成功能一致的编码规则变化的格雷码)
通过相机收到的编码图,就知道相机上某一像素对应的投影仪的像素,从而完成一一对应。
例如,1024*0124的相机,第一个像素位置(1,1),通过解20张图,解出格雷码(3,4),即对应投影仪位置为(3,4)
u=1,v=1,u'=3,v'=4 ;
遍历全图,可以一一对应。
Uc1 、Uprj 、Uc2 三者对应;Vc1 、Vprj 、Vc2也一样。
去除Uc2呢 ?
根据光路可逆,把投影仪当做是相机。
->
单目结构光!
标定cam,得到m,标定prj,得到m’

















 1321
1321

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









