





 超级会员免费看
超级会员免费看


一、文章主要内容总结
本文针对图像地理定位任务中现有方法可解释性不足、数据集场景单一、模型推理能力有限等问题,提出了一套以推理为核心的解决方案,核心内容包括:
- 问题背景:传统图像地理定位方法(分类、检索式)依赖海量数据训练,缺乏推理过程的可解释性;基于大型视觉语言模型(LVLMs)的方法虽具备推理潜力,但受限于场景单一的数据集和效果有限的有监督微调(SFT),泛化能力不足。
- 核心方案:
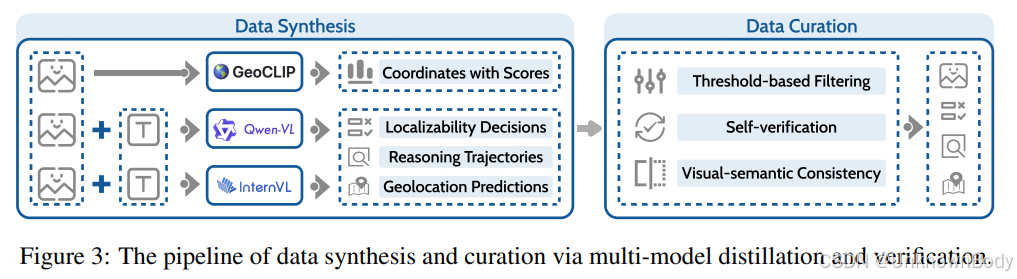
- 构建了推理导向的地理定位数据集 MP16-Reason:基于MP-16数据集扩展,整合多样化社交媒体图像,通过多模型知识蒸馏生成定位可行性评估、推理轨迹和预测位置,并经多维度验证(视觉-语义一致性、跨模型一致性)过滤噪声。
- 提出模型 GLOBE:采用基于组相对策略优化(GRPO)的强化学习框架,设计三个任务特定奖励(定位可行性奖励、视觉接地一致性奖励、地理定位准确性奖励),联合优化模型的推理能力与定位精度。
- 实验结果:GLOBE在MP16-Reason-Test、IM2GPS3K等多个基准数据集上,超越现有开源LVLMs,在多样化场景(室内、自然、城市)中表现出更强的泛化能力,同时生成可解释、视觉接地的推理轨迹。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2421
2421

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











