




一、被误解的指针定义:const char *s与char *s的本质
在 C 语言中,以下两种定义其实是等价的:
c:
const char *s = "HelloWorld!"; // 推荐写法,明确字符串只读
char *s = "HelloWorld!"; // 等价,但未声明const,存在修改风险
- 本质:两者都定义了一个指向字符串字面量的指针
- 关键区别:
const修饰符只是告诉编译器「禁止通过指针修改内容」,但字符串本身的存储位置与const无关
二、内存地址对比:用数据说话
实验代码:
c
#include <stdio.h>
int main() {
// 指针指向字符串字面量(只读区)
char *s1 = "HelloWorld!";
// 数组拷贝字符串到栈区(可修改)
char s2[] = "HelloWorld!";
// 本地变量(用于地址对比)
int i = 0;
// 打印地址
printf("s1指针地址: %p\n", (void*)&s1); // 指针本身的地址(栈区)
printf("s1指向的内容地址: %p\n", (void*)s1); // 字符串字面量地址(常量区)
printf("s2数组地址: %p\n", (void*)&s2); // 数组首地址(栈区)
printf("i变量地址: %p\n", (void*)&i); // 本地变量地址(栈区)
// 尝试修改(s1会报错,s2可以修改)
// s1[0] = 'h'; // 错误!修改常量区数据(未定义行为)
s2[0] = 'h'; // 正确!修改栈区数组数据
printf("修改后的s2: %s\n", s2); // 输出:helloWorld!
return 0;
}
运行结果分析:
s1指针地址: 0x7ffd5f4d37a8 // 位于栈区(和i变量地址接近)
s1指向的内容地址: 0x4006d4 // 位于常量区(代码段)
s2数组地址: 0x7ffd5f4d3790 // 位于栈区(紧邻i变量,证明是本地数组)
i变量地址: 0x7ffd5f4d378c
修改后的s2: helloWorld! // 栈区数组可修改
核心发现:
- 指针变量
s1本身在栈区,但它指向常量区的字符串字面量(只读) - 数组
s2完全在栈区,初始化时从常量区拷贝数据到栈区(可读可写) - 地址规律:
- 常量区地址通常较小(如
0x4006d4),属于程序代码段 - 栈区地址较大(如
0x7ffd5f...),属于运行时内存
- 常量区地址通常较小(如
三、深度解析:内存四区中的字符串
1. 指针定义:char *s = "xxx"
- 存储位置:
- 指针变量
s:栈区(局部变量)或静态区(全局 / 静态变量) - 字符串内容
"xxx":常量区(代码段,只读)
- 指针变量
- 特点:
c
printf("%p %p\n", "abc", "abc"); // 输出相同地址(编译器优化,共享常量)- 相同字符串字面量只会存储一次
- 通过指针修改会导致未定义行为(写入常量区)
2. 数组定义:char s[] = "xxx"
- 存储位置:
- 数组变量
s:栈区(局部)或静态区(全局 / 静态) - 字符串内容:从常量区拷贝到数组空间(栈区 / 静态区)
- 数组变量
- 特点:
char a[] = "abc", b[] = "abc"; printf("%p %p\n", a, b); // 输出不同地址(各自拷贝)- 每次定义数组都会独立拷贝数据
- 可以修改数组元素(操作栈区数据)
四、实战避坑指南
1. 何时用指针?何时用数组?
| 场景 | 指针char *s | 数组char s[] |
|---|---|---|
| 只读字符串 | 首选(配合const) | 不推荐(浪费栈空间) |
| 可修改字符串 | 禁止(指向常量区) | 必须(在栈区创建拷贝) |
| 字符串长度固定 | 不适用(需手动管理长度) | 适用(数组长度自动推断) |
| 作为函数参数 | 必须(数组会退化为指针) | 需传递长度参数 |
2. 安全写法示例:
// 只读场景(推荐)
const char *msg = "Error: File not found"; // 明确不可修改
// 可修改场景(必须用数组)
char buffer[100];
strcpy(buffer, "Hello"); // 操作栈区数组,安全可写
// 函数参数场景(指针形式)
void process_string(const char *str) { // 用const保证只读
// 安全读取str内容
}
3. 致命错误对比:
// 指针修改(未定义行为,可能崩溃)
char *ptr = "test";
ptr[0] = 'T'; // 写入常量区,触发段错误(Segmentation Fault)
// 数组修改(合法操作)
char arr[] = "test";
arr[0] = 'T'; // 写入栈区,正常修改
五、总结:一张图看懂内存布局
内存布局示意图:
+------------------+
| 常量区(代码段) | ← "HelloWorld!"等字符串字面量存储在此,只读
+------------------+
| 栈区 | ← char *s(指针变量)、char s[](数组)、int i等局部变量
+------------------+
| 堆区 | ← malloc分配的内存(本文未涉及)
+------------------+
| 静态区 | ← 全局变量、static变量
+------------------+
关键区别:
- 指针:指向常量区(只读),指针变量本身在栈区/静态区
- 数组:拷贝常量区数据到栈区/静态区(可读可写)
六、开发者必须记住的 3 个结论
- 字符串字面量是常量:永远存储在常量区,通过指针访问时禁止修改
- 数组是数据拷贝:定义数组会在栈区 / 静态区创建独立副本,允许修改
const是保护盾:使用const char *s明确标记只读意图,避免误操作
掌握这些知识,就能在 C 语言中正确处理字符串存储,避免内存错误和未定义行为。下次遇到类似问题,记得回想今天的布局图哦! 🚀
7 附录:
1 图片:
实际上是:
const char *s === char*s , 实际上是
2.如果改成指针模式:
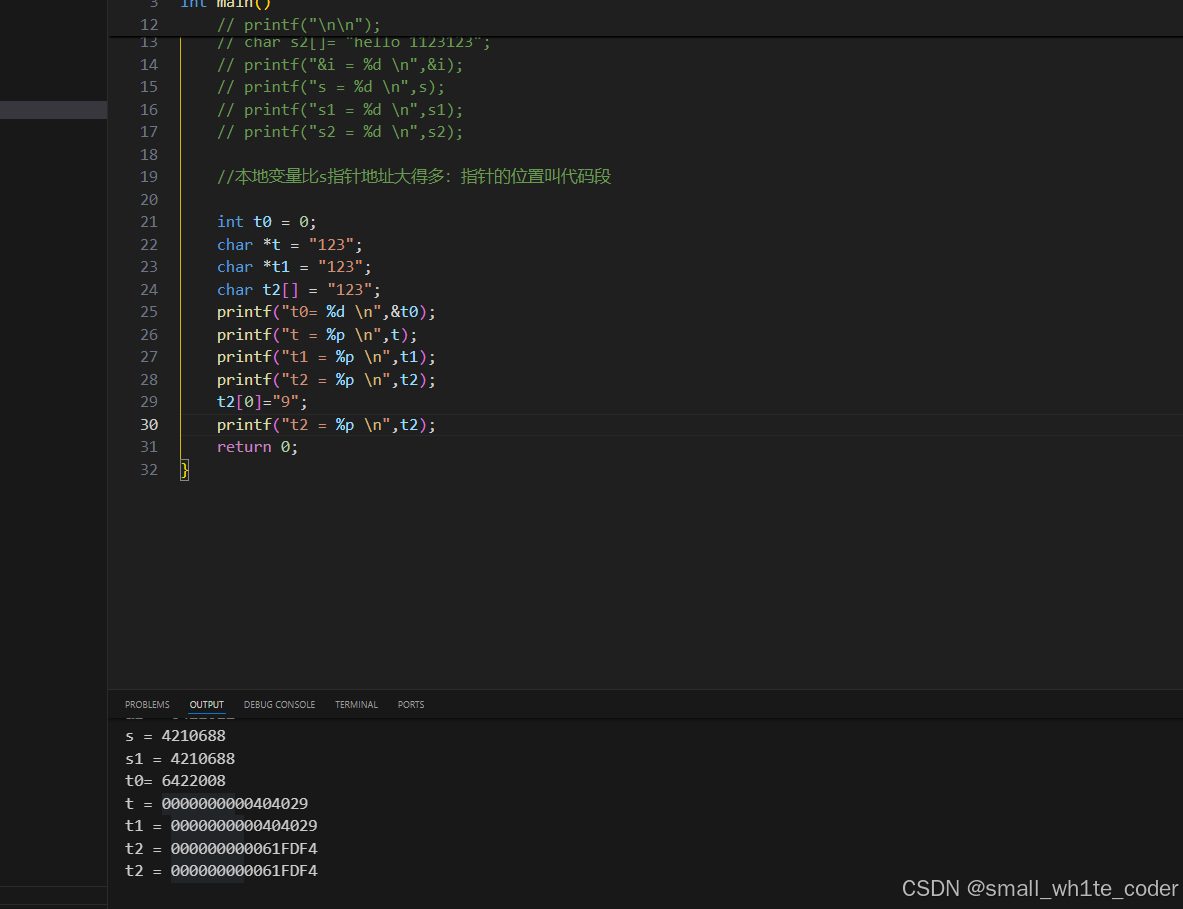
我们可以发现数组s2的地址和指针中所存放的地址是不一样的,并且和本地变量i的地址是相近的。这说明数组定义的字符串和指针定义的字符串存放的位置是不一样的,通过数组定义的字符串也可以进行修改。
3.总结:
1 char* c1="HelloWorld!"中,c1指向代码段中的常量,只读不写,且常量相同,指向的地址也相同!!!
2 char c2[]="HelloWorld!"中,c2指向堆栈段中的数据,可读可写,相当于把代码端的数据拷贝了出来!!!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









