




编码器脉冲值变化如下

这里以AB相双边沿四倍频为例说明
| A相上升沿 | B相高电平 | 脉冲值加一 |
| B相低电平 | 脉冲值减一 | |
| A相下降沿 | B相高电平 | 脉冲值减一 |
| B相低电平 | 脉冲值加一 |
准备
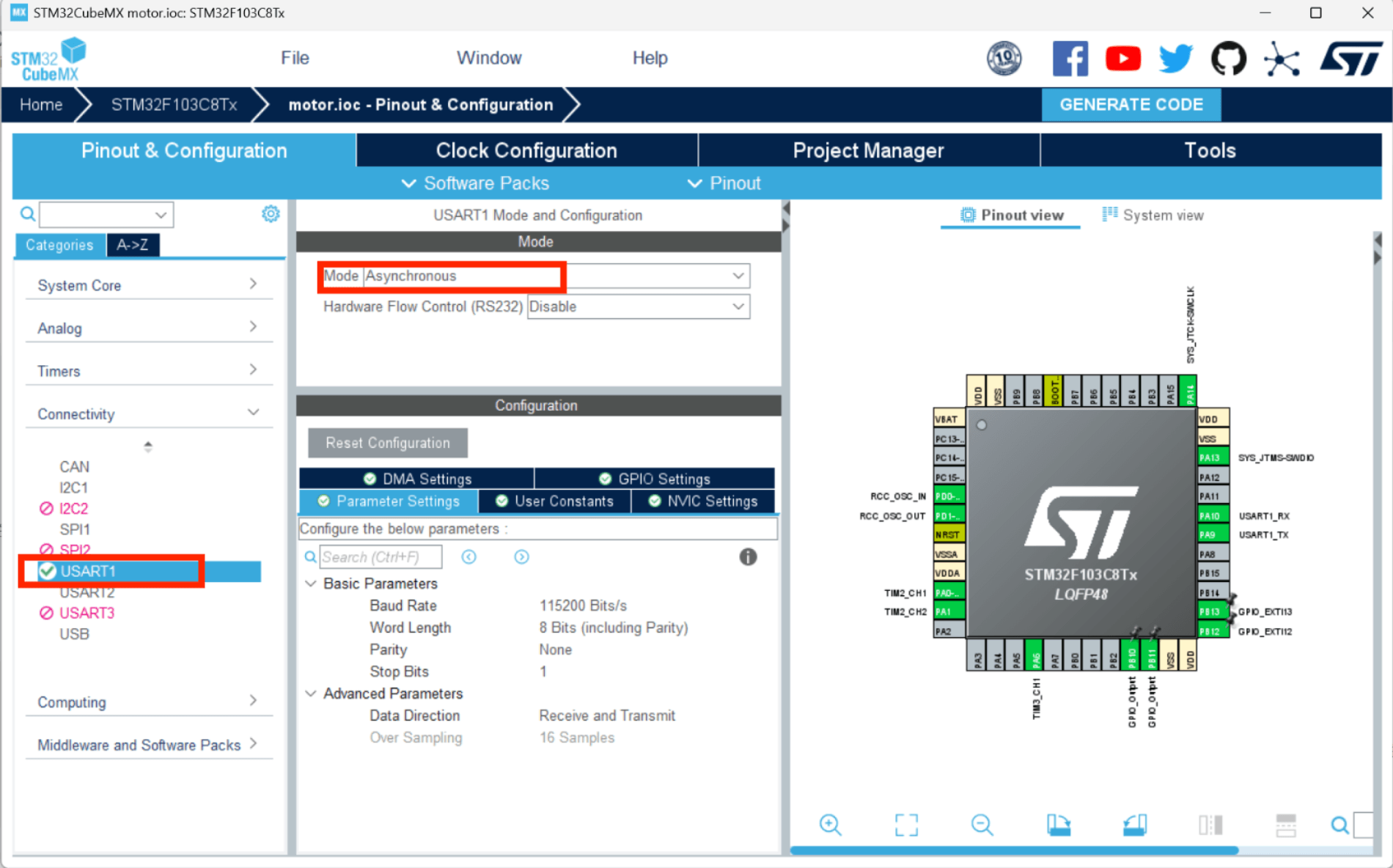
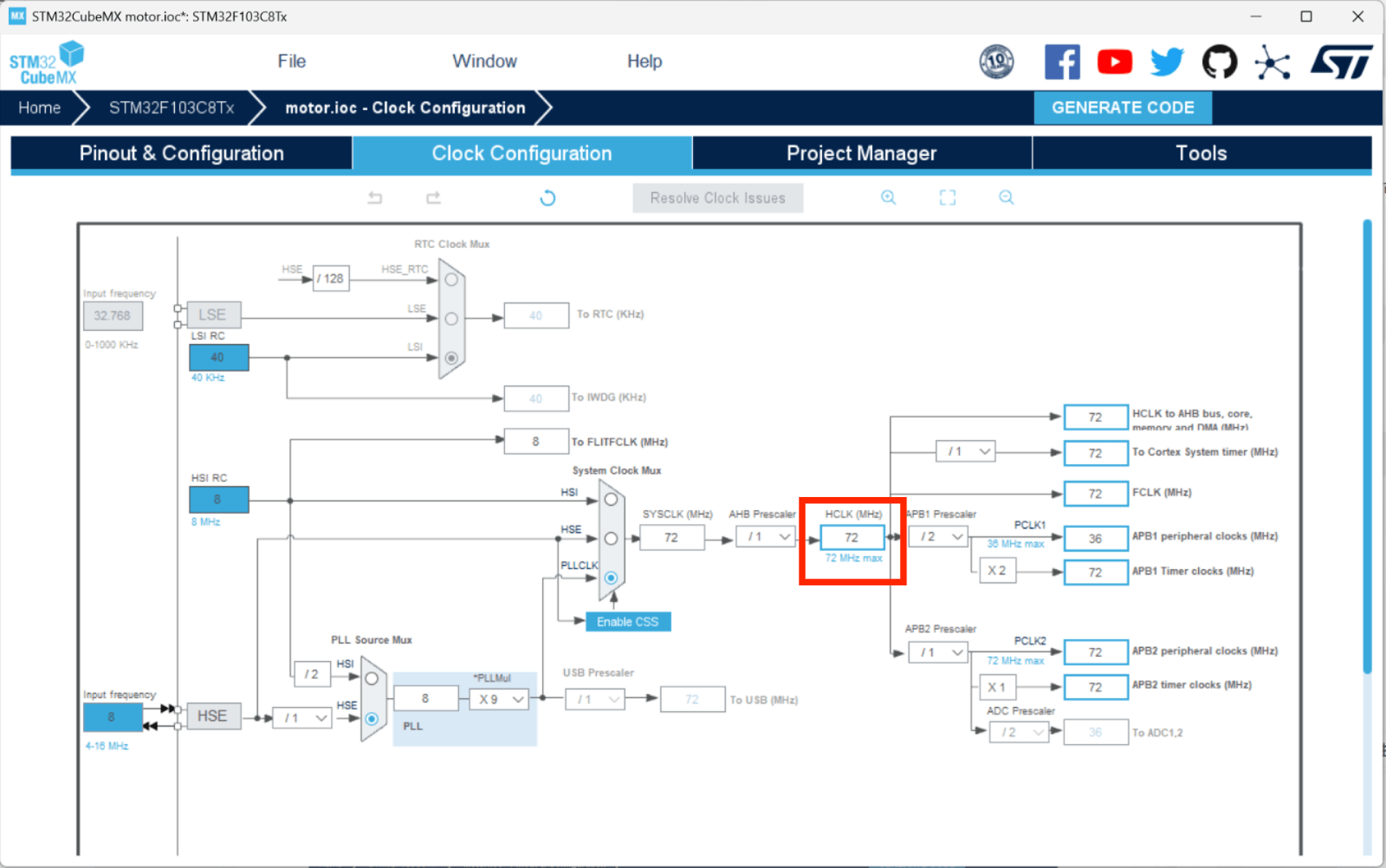
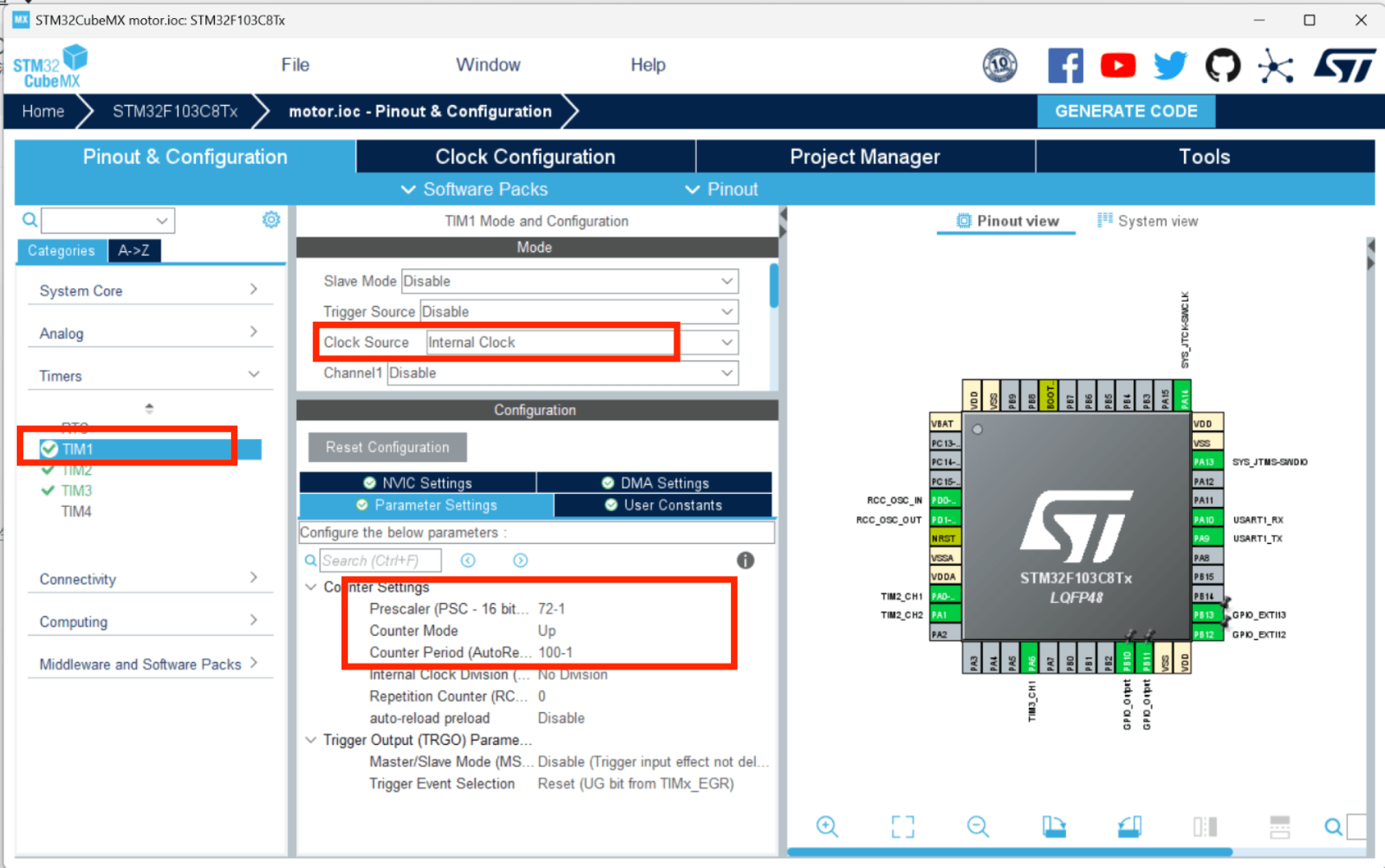
这里使用串口1用于编码器脉冲值的打印,并使用TIM1做100us周期定时器
cubemx配置
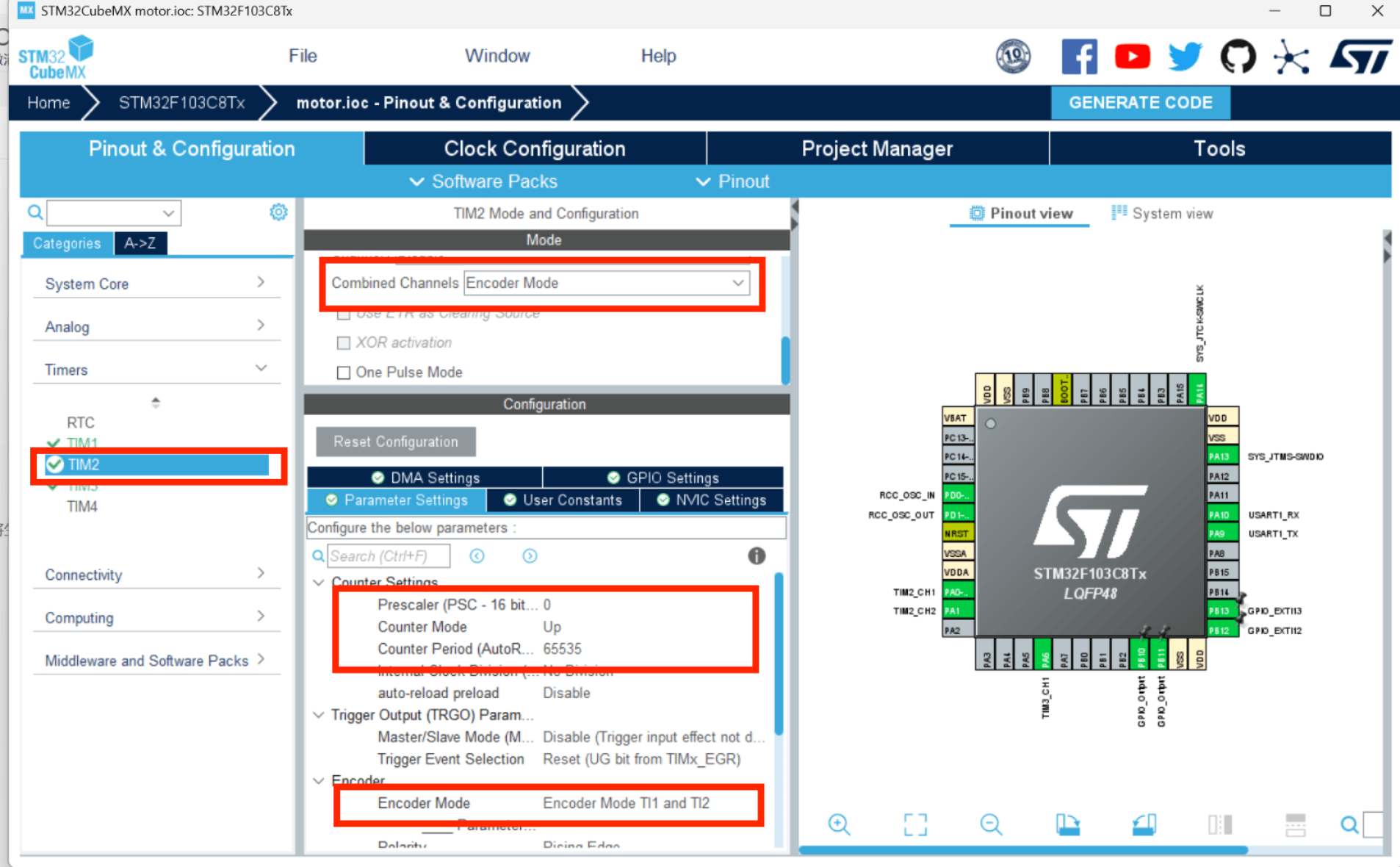
T = (PSC+1) * (ARR+1) / 72MHz = 100us
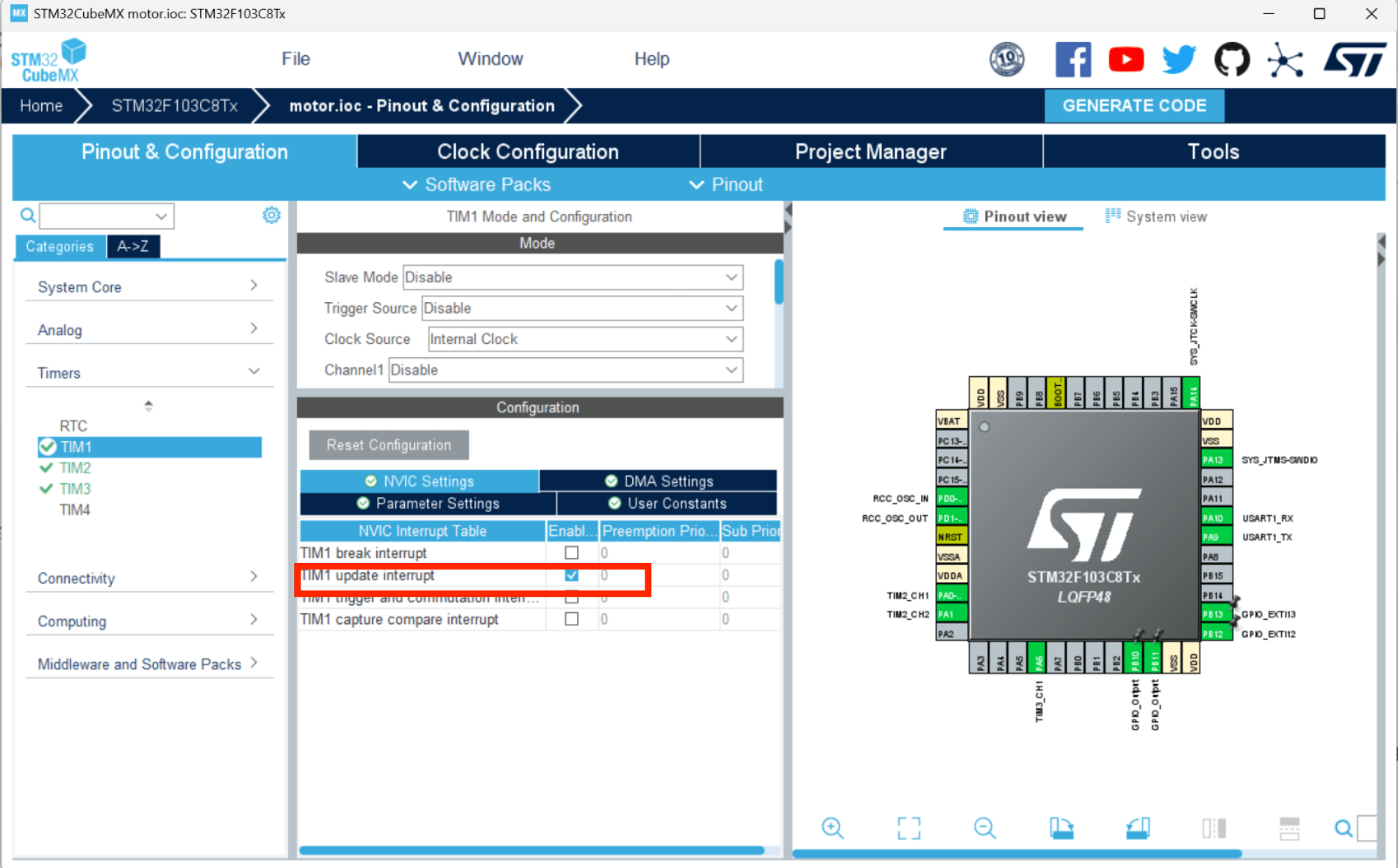
记得开启中断
代码
//uart.h
#ifndef __UART_H
#define __UART_H
#include "stm32f1xx_hal.h"
#include "stdio.h"
int fputc(int ch,FILE *F);
#endif
//uart.c
#include "uart.h"
extern UART_HandleTypeDef huart1;
int fputc(int ch,FILE *F)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xffff);
return ch;
}
1.编码器模式
cubemx配置
代码如下
//encoder_tim.h
#ifndef __ENCODER_TIM_H
#define __ENCODER_TIM_H
#include "stm32f1xx_hal.h"
void Encoder_Init(void);
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim);
#endif
//encoder_tim.c
#include "encoder_tim.h"
#include "uart.h"
extern TIM_HandleTypeDef htim1;
extern TIM_HandleTypeDef htim2;
//定义脉冲值,用volatile保护
static volatile short en_pulse;
//初始化,中断模式启动定时器,清零计数值和脉冲值
void Encoder_Init(void)
{
HAL_TIM_Base_Start_IT(&htim1);
HAL_TIM_Encoder_Start(&htim2,TIM_CHANNEL_ALL);
__HAL_TIM_SetCounter(&htim2,0);
en_pulse = 0;
}
//100us定时器,如后续需周期读取,可使用分频的方法
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim == &htim1)
{
//使用short类型,可以得到正负数值,分辨方向
en_pulse = (short)__HAL_TIM_GetCounter(&htim2 );
//打印脉冲值
printf("Encoder pulse : %d\r\n",en_pulse );
//清除标志位,可选
__HAL_TIM_CLEAR_FLAG(&htim1,TIM_FLAG_UPDATE);
}
}
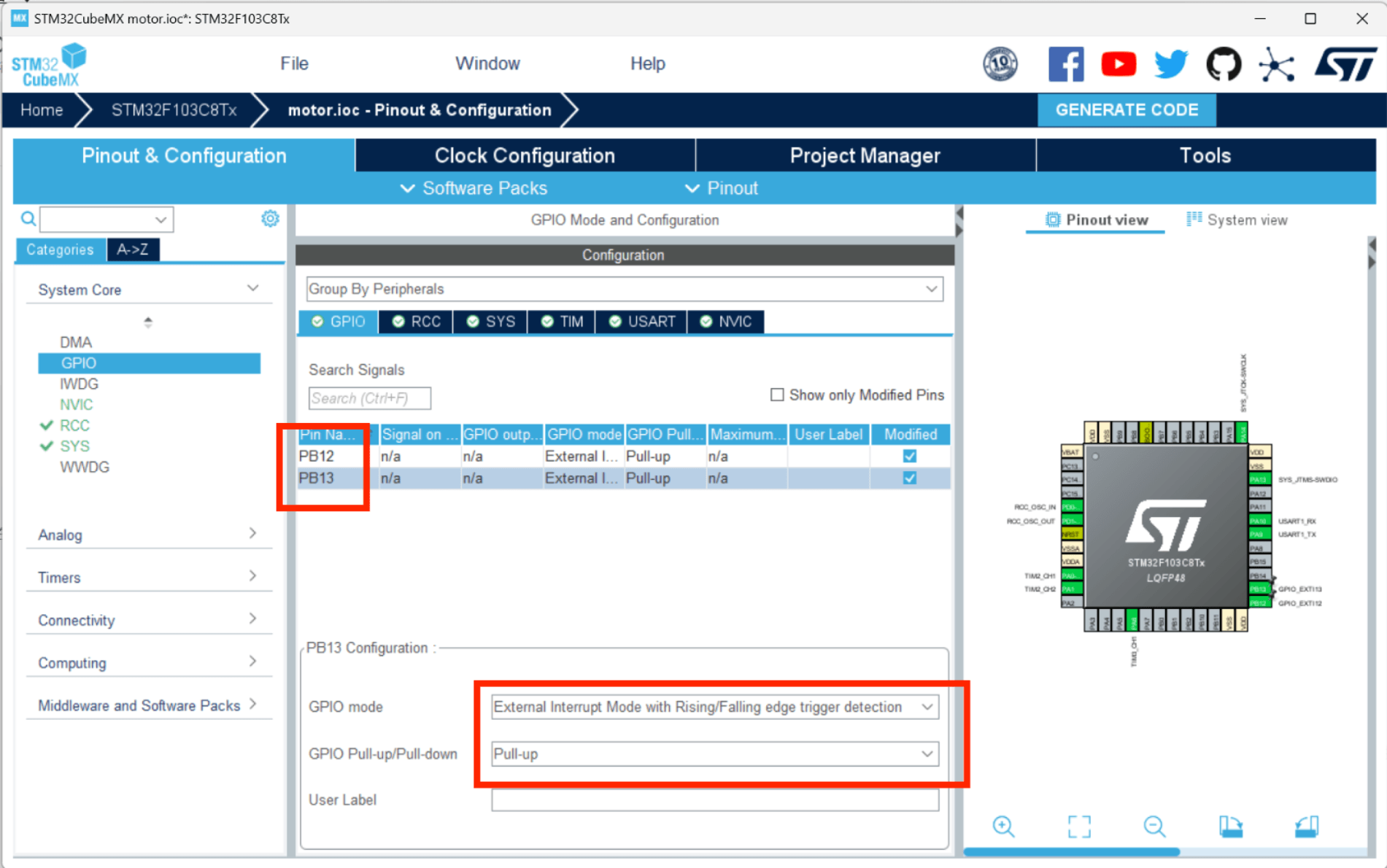
2.外部中断模式
cubemx配置
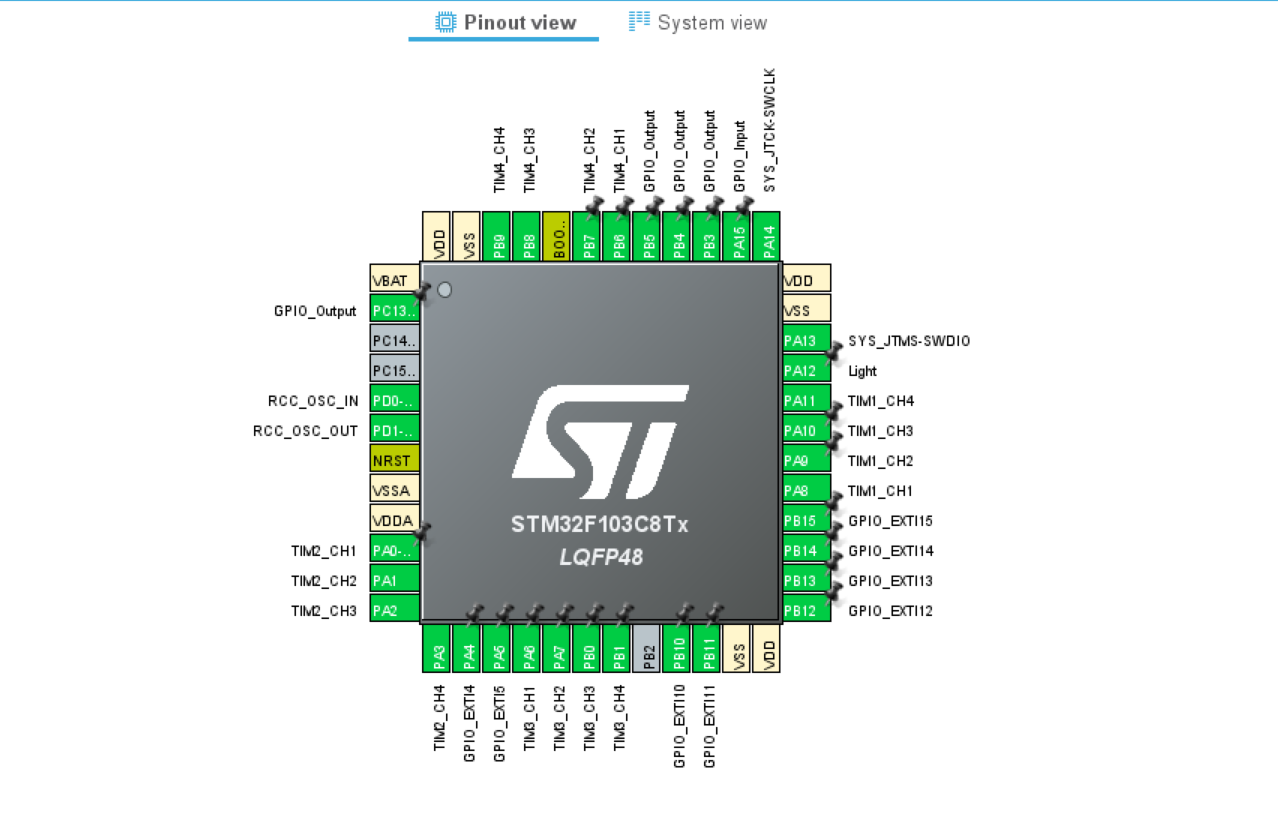
这里使用PB12/13 对应接线为 PB12-->A相 PB13-->B相
配置双边沿触发,上拉
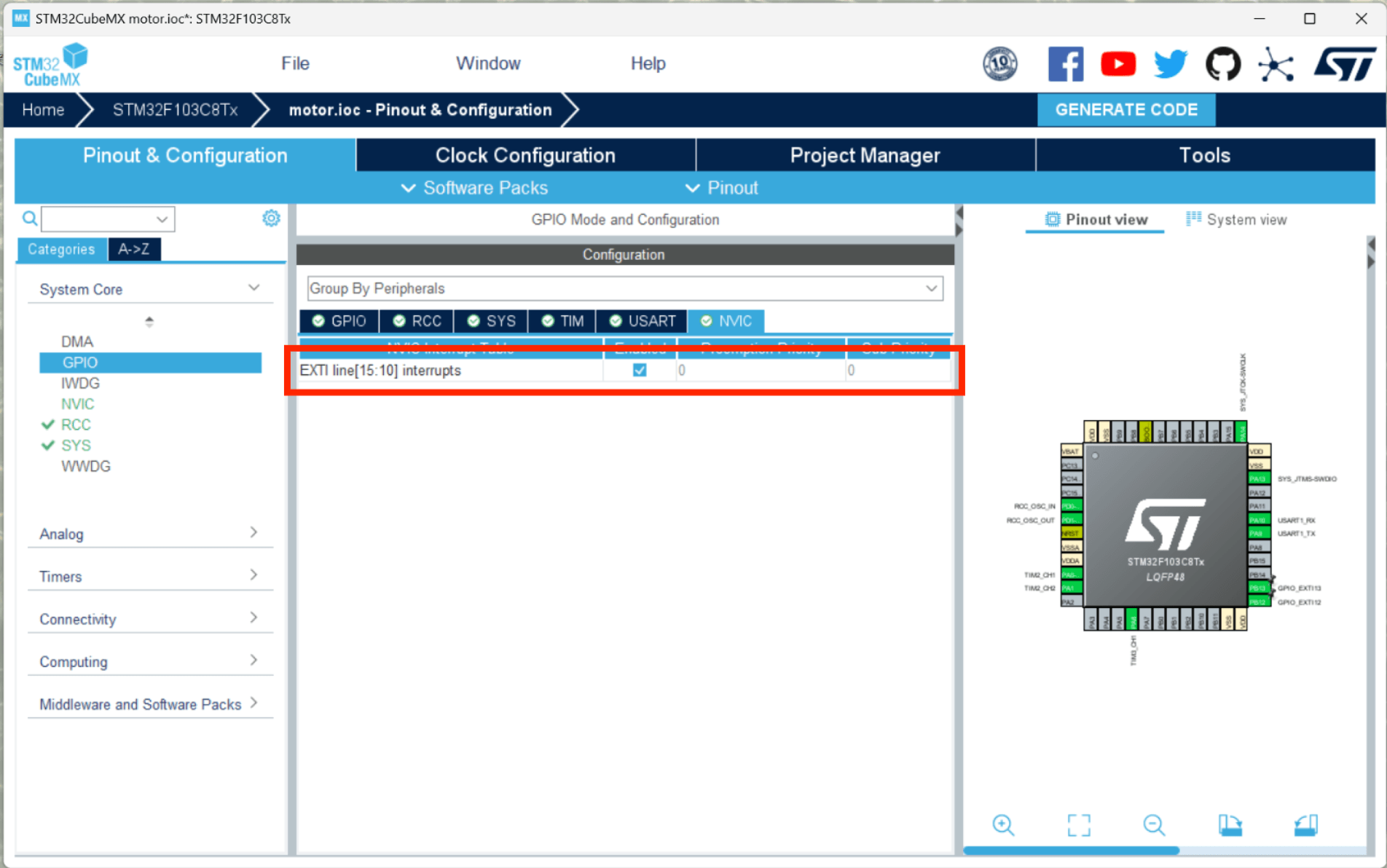
记得开启中断
代码
//encoder_exti.h
#ifndef __ENOCODER_EXTI_H
#define __ENOCODER_EXTI_H
#include "stm32f1xx_hal.h"
void Encoder_Init(void);
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin);
int16_t Get_Encoder(void);
#endif
//encoder_exti.c
#include "encoder_exti.h"
#include "uart.h"
extern TIM_HandleTypeDef htim1;
static volatile int16_t en_pulse;
//初始化,中断开启定时器,计数值清零
void Encoder_Init(void)
{
HAL_TIM_Base_Start_IT(&htim1);
en_pulse = 0;
}
//使用外部中断回调函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
//定义变量表示AB相电平状态
uint8_t en_a=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_12) ;
uint8_t en_b=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_13) ;
//A相
if(GPIO_Pin == GPIO_PIN_12)
{
if(en_a == GPIO_PIN_SET)
{
if(en_b == GPIO_PIN_RESET) en_pulse++;
else en_pulse--;
}
else
{
if(en_b == GPIO_PIN_SET) en_pulse++;
else en_pulse--;
}
}
//B相
if(GPIO_Pin == GPIO_PIN_13)
{
if(en_a == GPIO_PIN_SET)
{
if(en_b == GPIO_PIN_SET) en_pulse++;
else en_pulse--;
}
else
{
if(en_b == GPIO_PIN_RESET) en_pulse++;
else en_pulse--;
}
}
//清除标志位
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_Pin);
}
//返回脉冲值函数,后续需要可以调用
int16_t Get_Encoder(void)
{
return en_pulse;
}
//100us定时器,如后续需周期读取,可使用分频的方法
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim == &htim1)
{
printf("Encoder pulse : %d\r\n",en_pulse );
//清除标志位,可选
__HAL_TIM_CLEAR_FLAG(&htim1,TIM_FLAG_UPDATE);
}
}
两个程序main.c是一样的,只需要添加头文件和初始化函数即可,这里以编码器模式的为例
//main.c
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "encoder_tim.h" //头文件
//#include "encoder_exti.h"
#include "uart.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM3_Init();
MX_TIM1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
Encoder_Init(); //初始化函数
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
烧录后,用手转动电机就会有数值变化了,
如果是编码器电机,转动一圈脉冲值变化为 减速比*线数*4(因为这里是四倍频)
如,30减速比500线电机,一圈变化为 30*500*4=600000
写在最后:
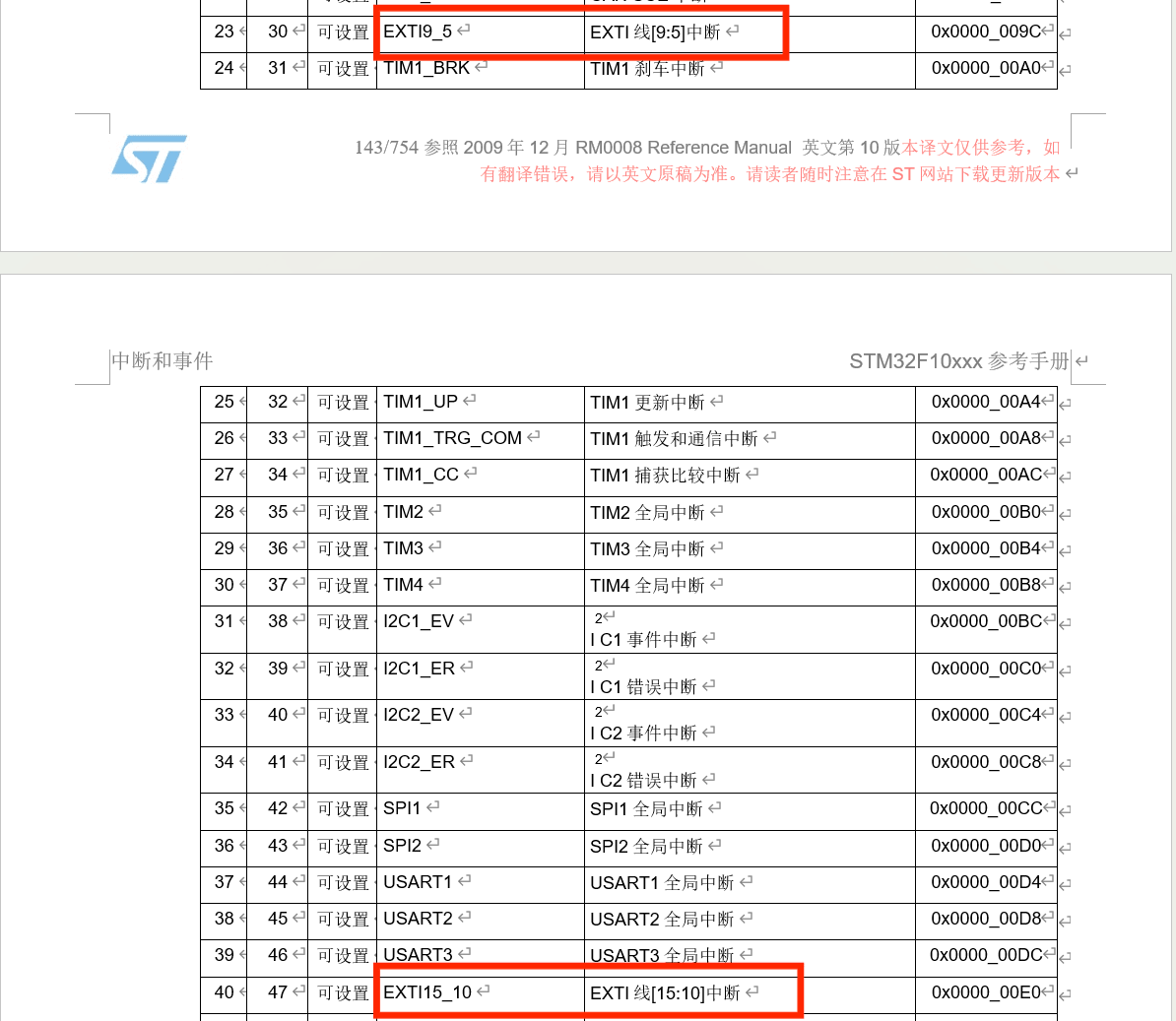
外部中断的方法可行,但是肯定还是直接使用编码器模式方便高效,且外部中断还需要考虑中断线的情况,因为STM32 的 EXTI 中断不是按 “GPIO 引脚号” 分配,而是按 “EXTI 线” 分配,且每根 EXTI 线在同一 GPIO 端口下仅对应 1 个引脚。

特指的是考虑使用外部中断方法做四轮小车的编码器测脉冲后续使用pid算法,可能就需要好好考虑一下引脚分布了,尤其如果你使用的还是STM32C8T6,那还是打算换一个芯片吧,或者使用串口通信使用两个STM32C8T6.
不过其实也可以做的,因为我当时真的分配出了8条中断线,最后剩下了PC13/14/15引脚,哈哈哈,贴出来给大家当个笑话,别学我。哦,PC13用来点灯了
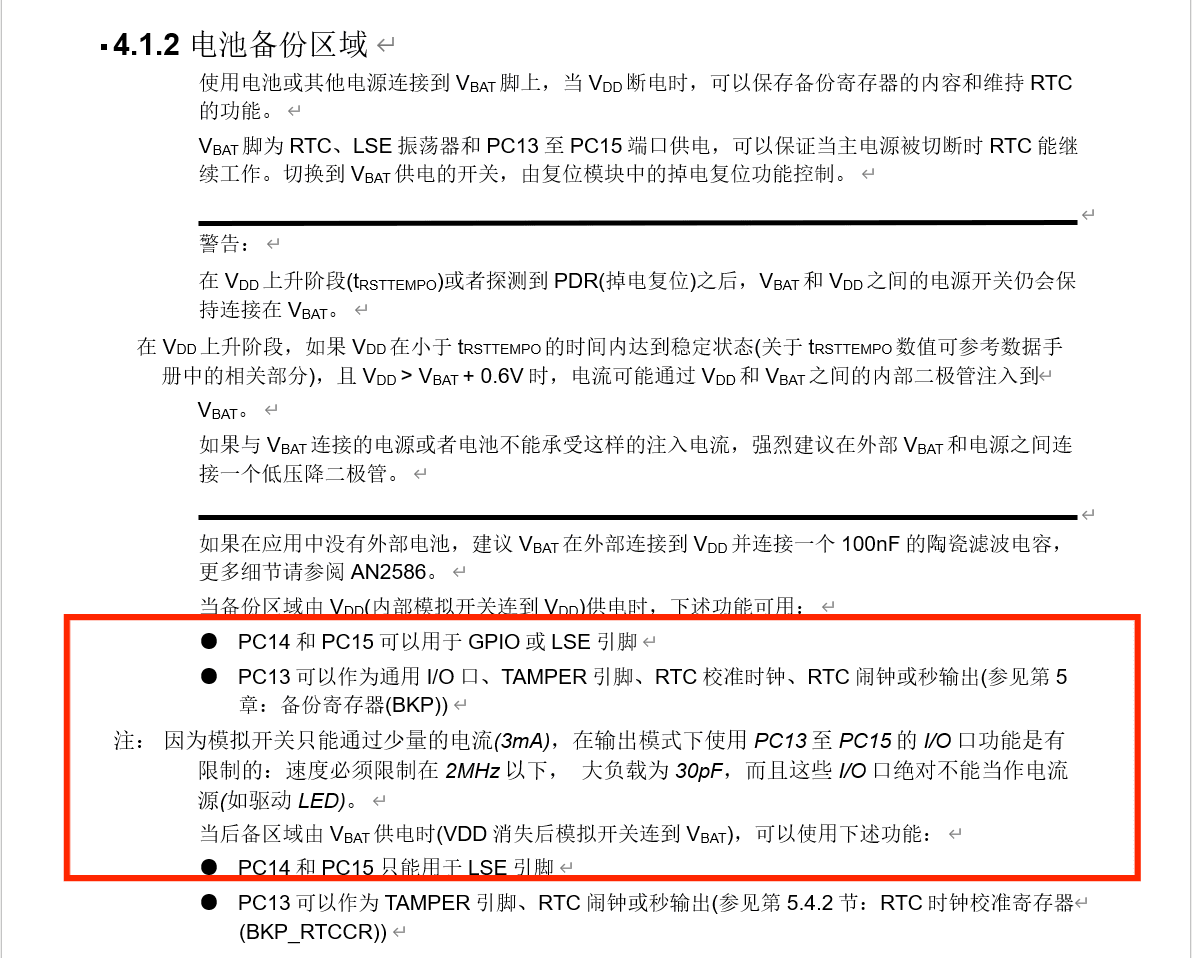
还有PC13/14/15这三个引脚比较特殊,在手册中这样一段描述


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









