




 该博客介绍了如何在已有的HT32GPTM多路PWM舵机控制基础上,通过添加串口通信功能,实现串口1和串口2的初始化,并详细展示了相关配置过程。同时,博主计划进一步集成蓝牙和WiFi模块,以实现远程控制。在中断服务函数中,根据接收到的字符控制舵机动作,如开启或关闭。
该博客介绍了如何在已有的HT32GPTM多路PWM舵机控制基础上,通过添加串口通信功能,实现串口1和串口2的初始化,并详细展示了相关配置过程。同时,博主计划进一步集成蓝牙和WiFi模块,以实现远程控制。在中断服务函数中,根据接收到的字符控制舵机动作,如开启或关闭。
合泰HT32串口控制多路舵机
前面完成了HT32 GPTM定时器的多路PWM舵机的控制,在此基础之上加入串口控制,后面会在加上蓝牙和WiFi实现远程控制。定时器和舵机相关配置不在重复如果还没有看的请前往前一篇。
usart.h
#ifndef _UART_H
#define _UART_H
#include "ht32f5xxxx_01.h"
#include <stdio.h>
#define COM_CLK(CK) (CK.Bit.USART0)
#define COM_PORT (HT_USART0)
#define COM_IRQn (USART0_IRQn)
#define COM_IRQHandler (USART0_IRQHandler)
#define COM_TX_GPIO_ID (GPIO_PA)
#define COM_TX_AFIO_PIN (AFIO_PIN_2)
#define COM_TX_AFIO_MODE (AFIO_FUN_USART_UART)
#define COM_RX_GPIO_ID (GPIO_PA)
#define COM_RX_AFIO_PIN (AFIO_PIN_3)
#define COM_RX_AFIO_MODE (AFIO_FUN_USART_UART)
// DEBUG_USART1
//串口1 USART - 1
#define COM1_CLK(CK) (CK.Bit.USART1)
#define COM1_PORT (HT_USART1)
#define COM1_IRQn (USART1_IRQn)
#define COM1_IRQHandler (USART1_IRQHandler)
#define COM1_TX_GPIO_ID (GPIO_PA)
#define COM1_TX_AFIO_PIN (AFIO_PIN_4)
#define COM1_TX_AFIO_MODE (AFIO_FUN_USART_UART)
#define COM1_RX_GPIO_ID (GPIO_PA)
#define COM1_RX_AFIO_PIN (AFIO_PIN_5)
#define COM1_RX_AFIO_MODE (AFIO_FUN_USART_UART)
void Uart_Init(void);
void USARTx_Init(void);
void USARTx_Init2(void);
void Usart_Sendbyte(HT_USART_TypeDef* USARTx, u8 Data);
void Usart_SendArray(HT_USART_TypeDef* USARTx, u8 *array,u8 num);
void Usart_SendStr(HT_USART_TypeDef* USARTx, uint8_t *str);
#endif
usart.c
#include "uart.h"
/************************************************************串口1 PA4 PA5**********************************************/
static void USART_CKCU_Config()
{
CKCU_PeripClockConfig_TypeDef CCLOCK;
CCLOCK.Bit.AFIO = 1;
COM1_CLK(CCLOCK) = 1;
CKCU_PeripClockConfig(CCLOCK, ENABLE);
}
static void USART_AFIO_Config()
{
AFIO_GPxConfig(COM1_TX_GPIO_ID, COM1_TX_AFIO_PIN, AFIO_FUN_USART_UART);
AFIO_GPxConfig(COM1_RX_GPIO_ID, COM1_RX_AFIO_PIN, AFIO_FUN_USART_UART);
}
static void USARTx_Config()
{
USART_InitTypeDef USART_InitStructure;
/*USART初始化
*波特率:115200
*字节长度:8位
*停止位:1位
*校验位:无
*模式:正常模式
**/
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WORDLENGTH_8B;
USART_InitStructure.USART_StopBits = USART_STOPBITS_1;
USART_InitStructure.USART_Parity = USART_PARITY_NO;
USART_InitStructure.USART_Mode = USART_MODE_NORMAL;
USART_Init(COM1_PORT , &USART_InitStructure);
/* 设置USART中断标志 */
USART_IntConfig(COM1_PORT, USART_INT_RXDR, ENABLE);
/* 使能USART接收、发送 */
USART_TxCmd(COM1_PORT, ENABLE);
USART_RxCmd(COM1_PORT, ENABLE);
/* 初始化中断 */
NVIC_EnableIRQ(COM1_IRQn);
}
void USARTx_Init()
{
USART_CKCU_Config();
USART_AFIO_Config();
USARTx_Config();
}
/************************************************************串口2 PA2 PA3**********************************************/
static void USART_CKCU_Config2()
{
CKCU_PeripClockConfig_TypeDef CCLOCK;
CCLOCK.Bit.AFIO = 1;
COM_CLK(CCLOCK) = 1;
CKCU_PeripClockConfig(CCLOCK, ENABLE);
}
static void USART_AFIO_Config2()
{
AFIO_GPxConfig(COM_TX_GPIO_ID, COM_TX_AFIO_PIN, AFIO_FUN_USART_UART);
AFIO_GPxConfig(COM_RX_GPIO_ID, COM_RX_AFIO_PIN, AFIO_FUN_USART_UART);
}
static void USARTx_Config2()
{
USART_InitTypeDef USART_InitStructure;
/*USART初始化
*波特率:115200
*字节长度:8位
*停止位:1位
*校验位:无
*模式:正常模式
**/
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WORDLENGTH_8B;
USART_InitStructure.USART_StopBits = USART_STOPBITS_1;
USART_InitStructure.USART_Parity = USART_PARITY_NO;
USART_InitStructure.USART_Mode = USART_MODE_NORMAL;
USART_Init(COM_PORT , &USART_InitStructure);
/* 设置USART中断标志 */
USART_IntConfig(COM_PORT, USART_INT_RXDR, ENABLE);
/* 使能USART接收、发送 */
USART_TxCmd(COM_PORT, ENABLE);
USART_RxCmd(COM_PORT, ENABLE);
/* 初始化中断 */
NVIC_EnableIRQ(COM_IRQn);
}
void USARTx_Init2(void)
{
USART_CKCU_Config2();
USART_AFIO_Config2();
USARTx_Config2();
}
void Uart_Init(void)
{
USARTx_Init();
USARTx_Init2();
}
/**********************************************共用代码****************************************************/
// 发送一个字节
void Usart_Sendbyte(HT_USART_TypeDef* USARTx, u8 Data)
{
USART_SendData(USARTx, Data);
// 等待发送数据寄存器清空
while (USART_GetFlagStatus(USARTx, USART_FLAG_TXDE) == RESET);
}
//发送每个元素数据长度为8位的数组
void Usart_SendArray(HT_USART_TypeDef* USARTx, u8 *array,u8 num)
{
u8 i;
for( i = 0;i < num;i++)
{
Usart_Sendbyte(USARTx,*array);
array++;
}
}
// 发送字符串
void Usart_SendStr(HT_USART_TypeDef* USARTx, uint8_t *str)
{
uint8_t i;
for(i = 0;str[i] != '\0';i++)
{
Usart_Sendbyte(USARTx,str[i]);
}
}
// 重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
/* 发送一个字节数据到串口 */
USART_SendData(COM1_PORT, (uint8_t) ch);
/* 等待发送完毕 */
while (USART_GetFlagStatus(COM1_PORT, USART_FLAG_TXDE) == RESET);
return (ch);
}
// 重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{
/* 等待串口输入数据 */
while (USART_GetFlagStatus(COM1_PORT, USART_FLAG_RXDNE) == RESET);
return (int)USART_ReceiveData(COM1_PORT);
}
/*
void COM1_IRQHandler(void)
{
if( USART_GetFlagStatus(COM1_PORT, USART_FLAG_RXDR) )
{
}
}
*/
/*
void COM_IRQHandler(void)
{
if( USART_GetFlagStatus(COM1_PORT, USART_FLAG_RXDR) )
{
data = USART_ReceiveData(COM1_PORT);
}
}
*/
main.c
#include "ht32.h"
#include "ht32_board.h"
#include "led.h"
#include "delay.h"
#include "uart.h"
#include "time.h"
/******************TH32 串口GPTM多路舵机控制*******************
Author:小殷
Date:2022-4-28
***************************************************************/
int main()
{
Led_Init();
Uart_Init();
GPTM_PWM_init();
Servo_Run(45);
Servo_Run2(45);
Servo_Run3(45);
Servo_Run4(45);
printf("---------pwm Test------\n");
while(1)
{
}
}
//使用串口1 进行数据的接收
void COM1_IRQHandler(void)
{
uint8_t data = 0;
if( USART_GetFlagStatus(COM1_PORT, USART_FLAG_RXDR) )
{
data = USART_ReceiveData(COM1_PORT);
//printf("data = %c\n",data);
if(data == '1')
{
Servo_Run(0);
printf("servo1 open\n");
}
else if(data == '2')
{
Servo_Run(45);
printf("servo1 close\n");
}
else if(data == '3')
{
Servo_Run2(0);
printf("servo2 open\n");
}
else if(data == '4')
{
Servo_Run2(45);
printf("servo2 close\n");
}
/* 可以加上其他控制功能 */
USART_ClearFlag(COM1_PORT, USART_FLAG_RSADD);
}
}
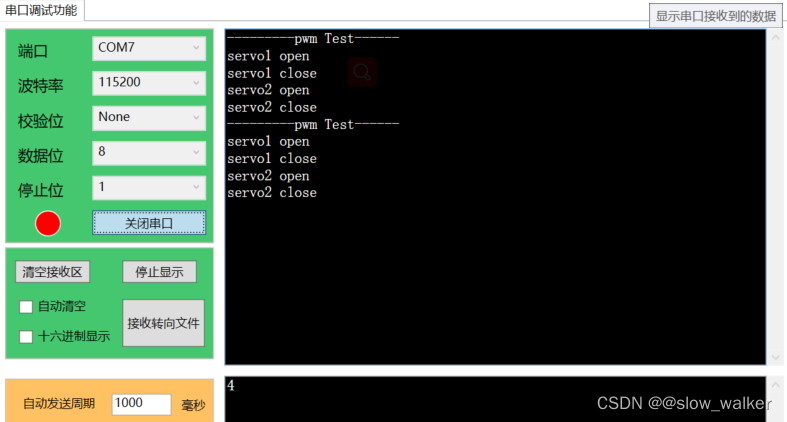
实验结果
ヾ(◍°∇°◍)ノ゙ 加油勒


















 2447
2447

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











