







 本文介绍如何在FPGA中利用2个计数器重新生成图像处理的行列坐标。当列计数器达到最大值(COLS-1)时,行坐标递增。设计包括一个复位信号rst,行有效输入lv,以及输出的列坐标x和行坐标y。通过参数化设置列数cols和行数rows,实现了灵活的坐标生成。
本文介绍如何在FPGA中利用2个计数器重新生成图像处理的行列坐标。当列计数器达到最大值(COLS-1)时,行坐标递增。设计包括一个复位信号rst,行有效输入lv,以及输出的列坐标x和行坐标y。通过参数化设置列数cols和行数rows,实现了灵活的坐标生成。
虽然在图像数据流水线中已包含行列坐标,但是一些算法由于其本身的设计必须由行有效信号 lv 重新生成行列坐标。
令图像的列数目为 COLS,行数目为 ROWS。
列坐标范围 0~(COLS-1)。
行坐标范围 0~(ROWS-1)。
基本设计思想是使用 2 个计数器分别计算列坐标和行坐标,当列坐标计数器计数至最大列坐标时,行坐标值增 1 。
模块 Subsystem 封装后如下所示:
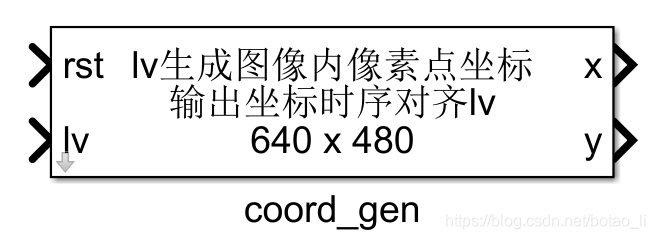
rst 用于复位坐标计数,lv 为输入的行有效信号,x 和 y 分别为输出的列坐标与行坐标。
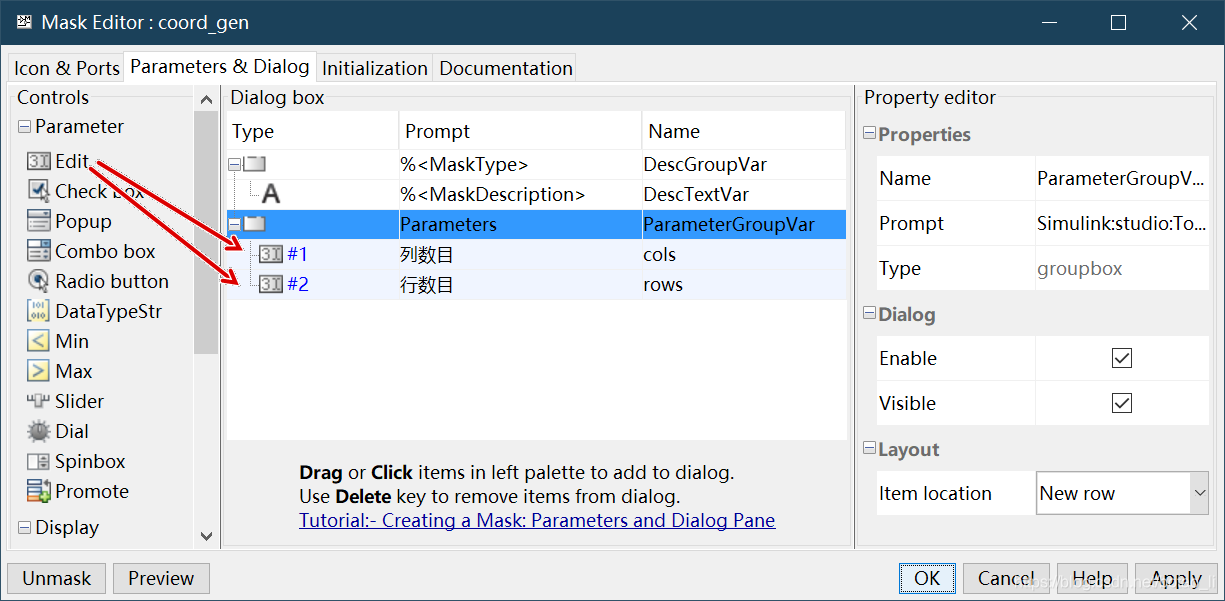
在 Subsystem 的 mask 中定义列数目 cols 变量和行数目 rows 变量:
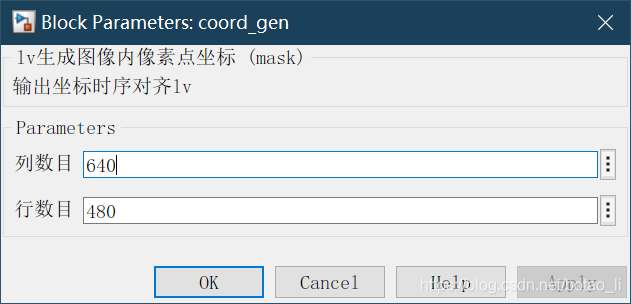
双击 Subsystem 弹出参数设置窗口:
列坐标计数器的配置如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









