



用于尸体标本关节镜组织操作技能训练的力测量系统
T. Horeman
代尔夫特理工大学生物力学工程系,荷兰代尔夫特2628 CD;学术医学中心,荷兰阿姆斯特丹2628 CD
G. J. M. Tuijthof
生物力学工程系,代尔夫特理工大学,荷兰代尔夫特2628 CD;学术医学中心,荷兰阿姆斯特丹2628 CD
P. B. Wulms
生物力学工程系,代尔夫特理工大学,荷兰代尔夫特2628 CD
G. M. M. J. Kerkhoffs 学术医学中心,荷兰阿姆斯特丹1105 AZ
R. M. Gerards 学术医学中心,荷兰阿姆斯特丹1105 AZ
M. Karahan
医学院,阿奇贝大学,_阿塔谢¸希 尔,伊斯坦布尔34758,土耳其
为了提高关节镜技能,首选的训练方式是使用尸体组织,因为这能提供最真实的场景。尸体训练的一个缺点是由于缺乏合适的系统,无法提供客观绩效跟踪及相应的反馈。该系统的主要标准是:应兼容任何类型的尸体关节,可与任意类型的器械配合使用,易于设置,并能测量反映任务效率(任务时间)和安全性(器械与组织相互作用产生的力)的两个关键参数。由此开发出一种力测量系统,该系统由一个定制的通用台钳、一个定制设计的六自由度(DOF)力测量桌面(FMT)组成,并连接至配备定制软件的计算机,用于记录所有方向上的时间和力。FMT经过校准,能够在0–750N量程范围内测量力,精度达到0.1 N。在两次尸体训练课程中,使用FMT进行了测量。观察发现,所获取的力数据能够区分新手与专家,或反映在尸体牛膝和人膝中执行导航任务的特定阶段。从力测量中突出显示的一个明显阶段是新手在进行关节应力测试时存在的不足。
导航。这会导致关节间隙过小而不便于检查,并迫使新手重新调整牵张。由于施加的负荷无法直接看到,FMT 可通过在训练期间提供关于施加的负荷的明确提示,从而促进更高效的训练。这使得对受训者的监督更加精确。[DOI: 10.1115/1.4034145]
引言
传统上,外科技能在常规临床环境中进行培训,即所谓的师徒模型 [1]。师徒模型并未被视为最高效和安全的方法,因为培训是在患者身上进行的。这会危及患者安全,尤其是在住院医师进行初次操作时 [1]。在关节镜检查中,长期以来更倾向于采用尸体训练作为安全的培训环境,因为它具有高度真实性,并可使用真实器械和组织进行培训 [2]。骨科实习生表示,他们从利用尸体材料在实验室或特殊课程中进行的关节镜技能教学中获益颇多 [3]。已开发出用于培训关节镜检查的牛和猪动物模型的膝关节和肩关节 [4–7]。
然而,尽管新的软性防腐技术能够保持组织特性并保留关节运动,且也可应用,但优先使用的仍是新鲜冷冻尸体关节 [8]。为了监控培训进度,已经开发了名为全局评分量表的客观评估工具[9–11]。然而,这种绩效跟踪方式的一个缺点是耗时较长,需要每位学员配备一名导师,但最重要的是无法充分提供关于学员在安全的器械‐组织操作方面进展的反馈。这主要是因为导致组织损伤的力实际上无法被看见,使得难以当场给予反馈,并准确指出学员应在组织操作的哪一部分进行改进。
最近的研究表明,力信息的使用可提供有关组织损伤风险的有价值信息,并可用于安全组织处理技能评估[12,13]。此外,研究显示器械运动与组织相互作用力之间并无相关性。这意味着器械‐组织力数据有能力揭示其他方式无法检测到的外科技能相关信息[14]。
因此,目标是设计并初步评估一种系统,该系统可在尸体材料上进行关节镜技能训练期间实现对时间和力的客观测量。该系统最终将提供直接的与力相关的反馈,帮助学员尽量减少组织损伤,并可用于客观的绩效评估。
材料与方法
固定系统
该装置的主要标准是能够固定任何类型的尸体关节。在大多数尸体课程中,关节被固定在圆柱形骨骼(股骨、胫骨和肱骨)上。为了固定来自人类和动物的任何尸体材料,夹具应适用于直径在20毫米到50毫米之间的圆柱形骨形状。此外,夹具应易于使用,并具有足够的强度以承受培训环节中施加在尸体关节上的所有力。
力精度、量程和处理频率
我们之前的研究以及 Toshiro等人关于半月板器械操作的研究表明,半月板切除术期间的接触力可高达18 N [15,16]。根据奥贝德等人的研究,软骨强度最大为19.5 N/mm² [17]。如果我们假设标准探头的接触面积约为1 mm²,则允许作用在软骨上的最大接触力约为19.5 N。因此,设定的测量精度为±0.5 N [18]。
稿件收到日期2016年1月20日;最终稿件收到日期2016年6月13日;在线发表于 2016年9月12日。副编辑:Carl Nelson。
医疗设备杂志 2016年12月,第10卷 / 044508‐1 版权所有 V C 2016 美国机械工程师学会
从美国机械工程师学会数字馆藏下载 n.asme.org/pdfaccess.ashx?url=/data/journals/jmdoa4/935657/ 于2017年3月30日访问 使用条款:http://www.asme.org/a
本文档由 funstory.ai 的开源 PDF 翻译库 BabelDOC v0.5.10 (http://yadt.io) 翻译,本仓库正在积极的建设当中,欢迎 star 和关注。
要测量的最大载荷取决于膝关节镜训练期间施加的关节应力以及尸体标本的质量。标本的最大质量估计为12千克 [19,20], 根据Tuijthof等人所述,关节应力可高达140牛顿 [21]。在最坏情况下,系统上会额外施加210牛顿的力。若采用安全系数为2,则FMT应能承受高达940牛顿的力。由于 FMT应可在不同配置下使用(例如,直立、悬挂或侧向固定在墙上),因此该最大载荷针对每个独立的Fx、Fy和Fz方向进行定义。
记录的力数据的频率取决于预期的器械移动频率。假设该系统应以至少24赫兹的频率记录数据,这等于最大受控手部频率15赫兹的两倍[22]。
监控系统
为了监测尸体关节外的所有器械运动以及关节内的器械尖端运动,需要一个摄像头系统,从上方、侧面、系统操作员位置和关节镜视野进行图像记录。出于后处理目的,这四个摄像头的 recordings 应同步,以评估器械的运动和操作。
概念设计
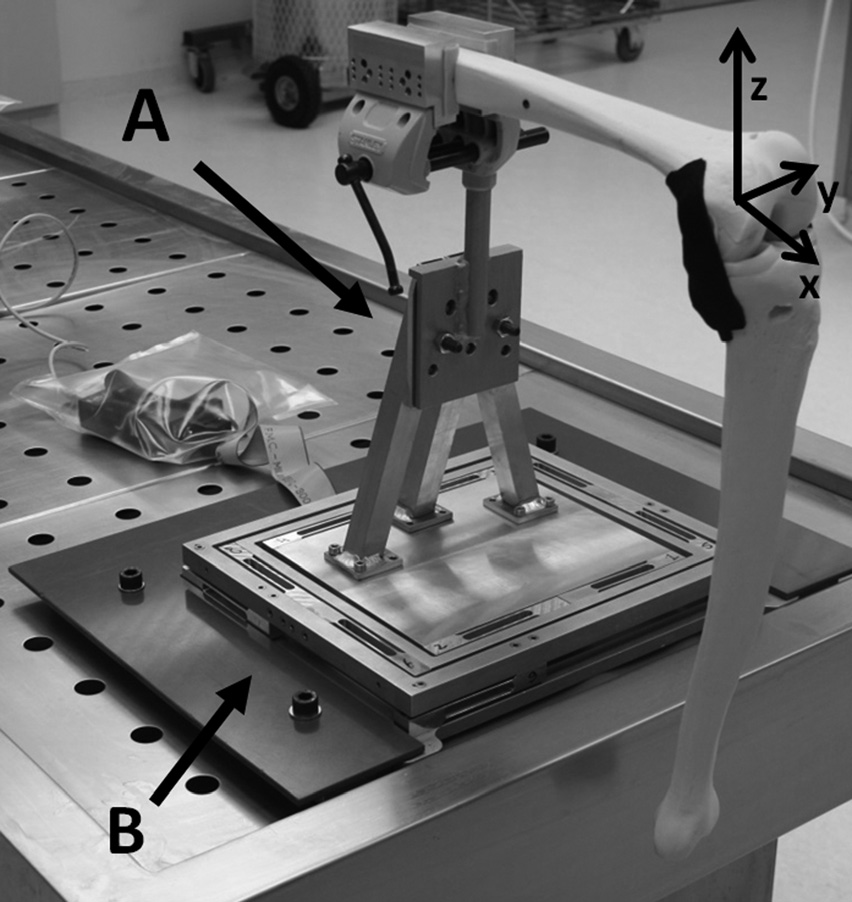
预期的性能测量系统将由两个部分组成: FMT和夹具支撑(图1)。我们明确选择了这一概念,而非其他方案,例如将力传感器附加到器械上[23], 因为它允许在不损害培训环境真实性的前提下,将任何类型的尸体关节与任何类型的器械结合使用。
结构设计
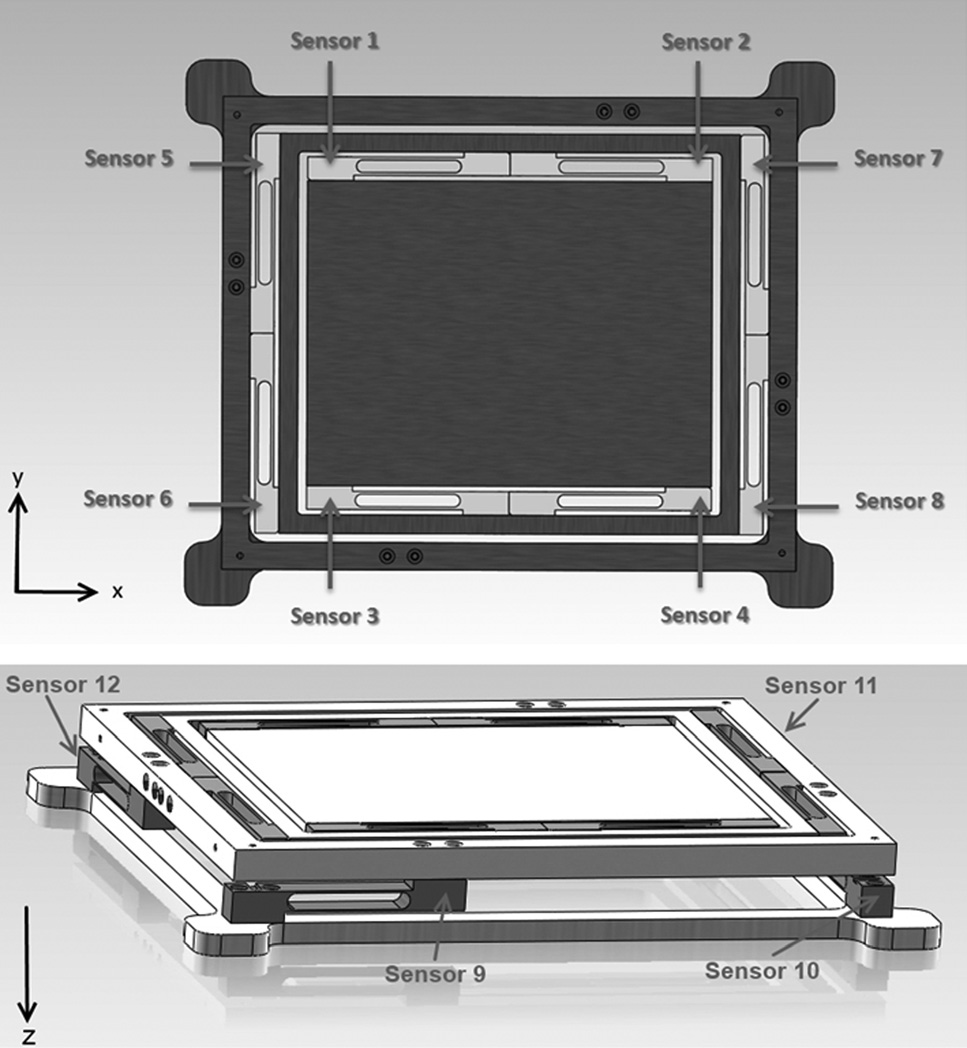
尽管测力平台有多种设计方案,但我们选择了一种可将施加的力解耦为三个力分量Fx、Fy和Fz,并消除力矩测量的概念。FMT由三个方形框架组成(图2);每个框架通过四个弯曲梁相互连接(图3)。每个弯曲梁应仅在单一方向上变形,以使每个方形环仅在一个方向上产生位移。通过测量方框四个角的相对位移,可获得作用在每个方框上的施加的力。
当已知梁的刚度时,即可计算出结果。通过测量位于正方形每个角上的四个弯曲梁的力,由于使用力的总和来计算总载荷,因此重量分布对测量结果没有影响。
弯曲梁设计
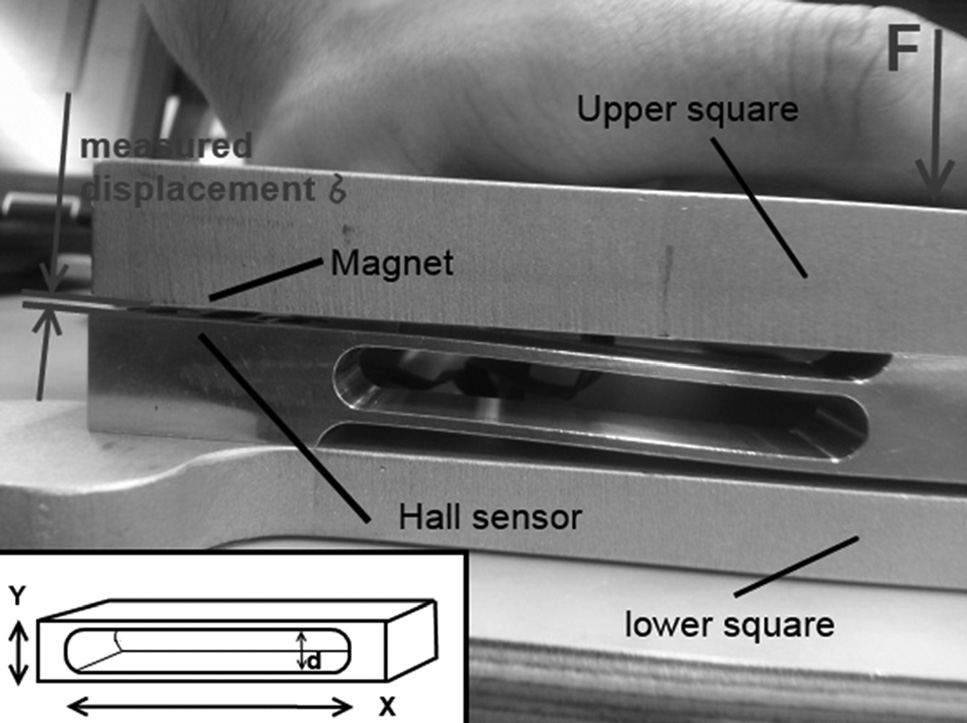
在FMT中集成了十二个相同的弯曲梁(图 2)。一个弯曲梁可被建模为一个平行四边形机构,其一侧通过刚性固定连接到外部世界,另一侧则通过单自由度滑动固定连接。由于外力F引起的位移d和角度h(图3)可描述为
$$
h = \frac{-FL^2}{2EI} + \frac{ML}{EI} = 0, \quad d = \frac{-FL^3}{3EI} + \frac{ML^2}{2EI}
$$
对于一自由度滑动连接,力的角旋转将为零,且可计算滑动固定处的力矩和位移
$$
M = \frac{FL}{2}, \quad dy = \frac{-FL^3}{3EI} + \frac{ML^3}{4EI} = -\frac{1}{12} \cdot \frac{FL^3}{EI}
$$
惯性矩 $I$ 是针对力 $F$ 的方向计算的
$$
I = \frac{1}{12} \cdot x \cdot y^3 - d^3
$$
其中 $x$ 为弯曲梁在 $x$ 方向的长度,$y$ 为弯曲梁在 $y$ 方向的长度,$d$ 为切口高度(图 3)。已知在 $y$ beam; y方向的位移 (d),可按如下方式计算弯曲梁在 $y$ 方向的刚度($k_{beam;y}$):
$$
k_{beam;y} = \frac{F}{d_{beam;y}} = \frac{E \cdot x}{y^3 - d^3} \cdot \frac{1}{L^3}
$$
由于最恶劣加载情况(940牛顿)是针对Z方向上的四个弯曲梁定义的,因此我们将要测量的最大力($F_{beam;max}$)以及每个梁的刚度($k_{beam,y}$)定义为
$$
F_{beam;max} = \frac{940\,N}{4} = 235\,N
$$
$$
k_{beam;y} = \frac{F}{d} = \frac{235}{3} = 78\,N/mm
$$
为了实现正确梁行为所需的数值,表 1列出了选定的尺寸。弯曲梁的设计使得当位移(图 3)变为零时,最大弯曲梁变形受到限制。
表1 所有弯曲梁的尺寸
| 符号 | 描述 | 尺寸(毫米) |
|---|---|---|
| L | 穿过梁的切口长度 | 50 |
| d | 切口尺寸 | 7 |
| y | 梁的高度 | 10 |
| x | 梁的宽度 | 15 |
传感器选择
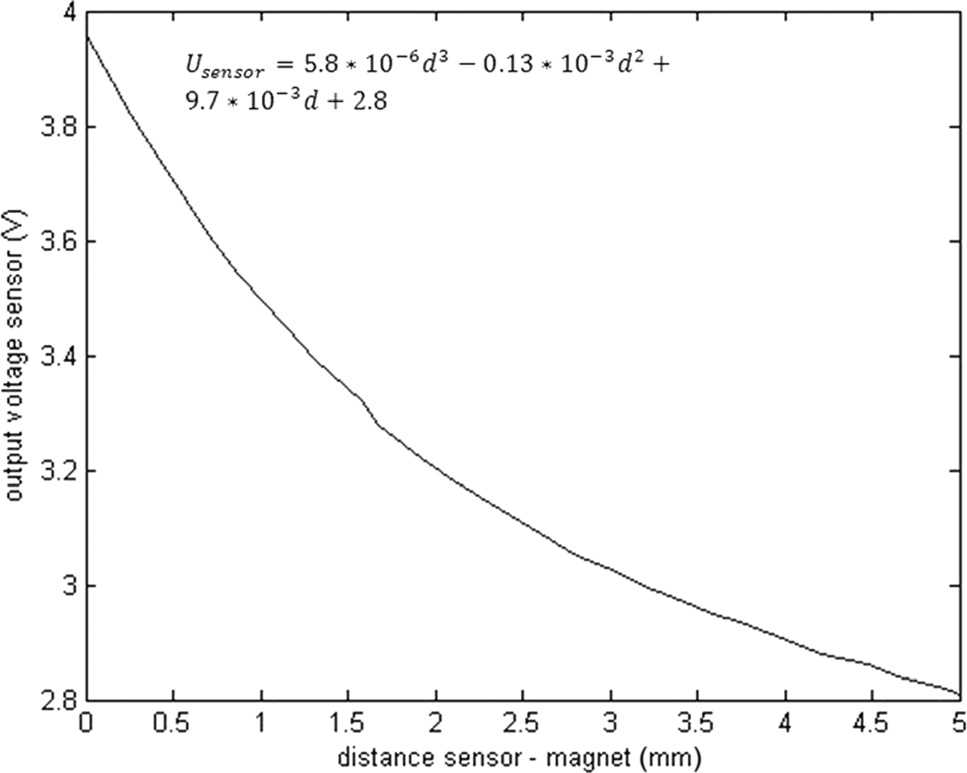
线性霍尔效应传感器(SS495A‐IC, Honeywell S&C,南卡罗来纳州福特米尔)与钕铁硼圆盘磁铁(N802,Eclipse磁铁,英国谢菲尔德)组合被选用以测量弯曲梁的位移,因为该组合成本较低,可实现正负力测量,并且在所需的精度量程范围内。霍尔传感器和磁铁被粘接在每个弯曲梁上的预制间隙中(图3)。为了设定磁铁与霍尔传感器之间的距离,将圆形磁铁粘接在M5×6毫米插件的一端,该插件安装在框架上的螺纹孔中,位置正对霍尔传感器。通过旋转该插件,可将磁铁与传感器之间的距离调节至所需的 3毫米。此距离可防止系统在满载时磁铁与传感器直接接触。
霍尔传感器连接到扩展I/O接口(LabJack U3‐LV),再连接至计算机。弯曲梁位移引起的磁场变化由霍尔效应传感器测量。这是一种非线性关系,需要通过校准将磁场值的变化转换为实际的力值。校准通过回归线进行。
软件
对于分析计算和编程软件,使用了 MATLAB软件包 (版本8.0.0.783 R2012b,美国马萨诸塞州纳蒂克 MathWorks公司)。开发了一个用户界面,用于记录来自全部 12个霍尔效应传感器的原始数据。所有原始电压数据均通过截止频率为24赫兹的低通巴特沃斯滤波器进行滤波。随后,利用校准曲线,软件通过对FMT中相应四组霍尔效应传感器所测得的力进行求和,计算出Fx、Fy和Fz力。然后,算法在用户界面中实时绘制X、Y和Z方向的力数据。
摄像头跟踪系统
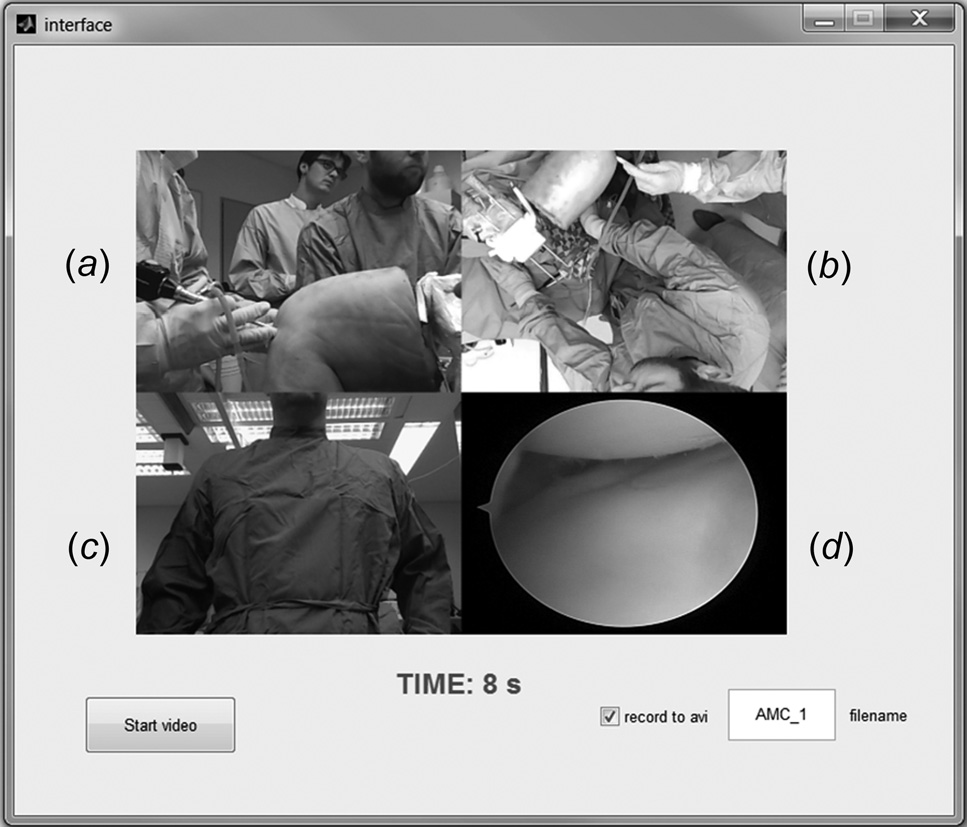
在 MATLAB中,编写了另一个软件例程,用于将四个视频图像合并到一个框架中(图 4)。关节镜图像(d)通过Grabby硬件(Grabby, Terratec, Alsdorf, Germany)从关节镜获取。该界面允许用户启动和停止视频,并以“.avi”格式记录并存储数据,且可自定义文件名。来自网络摄像头(a)和(b)以及关节镜(d)的同步视频数据用于说明在力数据分析过程中发生的显著事件。来自集成笔记本电脑摄像头(c)的同步视频数据用于将视频标记(例如,系统操作员的手势信号)与力数据中的记录标记同步。
评估
校准
使用霍尔效应传感器和磁铁加载单个弯曲梁。根据此测试,确定了梁的位移与传感器输出电压之间的非线性二次多项式拟合关系(图 5)。基于该拟合结果,最大向上和向下测量范围被定义为 +2.5 mm 和 -2.5mm。
表2 多项式是在校准测试中确定的,用于将每个传感器测得的电压输出与施加的力关联起来。这些多项式在软件程序中用于计算力。
| 传感器方向 | 多项式 (F = p1 × v² + p2 × v + p3) | R² |
|---|---|---|
| 1 y | P1 = -752, p2 = 2706, p3 = -2401 | 0.9993 |
| 2 y | P1 = -965, p2 = 3391, p3 = -2941 | 0.9986 |
| 3 y | P1 = -6462, p2 = -20,350, p3 = 15,960 | 0.9996 |
| 4 y | P1 = 2555, p2 = -8500, p3 = 6997 | 0.9997 |
| 5 x | P1 = -876, p2 = 3156, p3 = -2822 | 0.9995 |
| 6 x | P1 = 1656, p2 = -5739, p3 = -4891 | 0.9973 |
| 7 x | P1 = 790.9, p2 = -2845, p3 = -2507 | 0.9993 |
| 8 x | P1 = -2022, p2 = 6606, p3 = -5380 | 0.9996 |
| 9 z | P1 = -364, p2 = 1438, p3 = -1363 | 0.9999 |
| 10 z | P1 = -434, p2 = 1670, p3 = -1552 | 0.9996 |
| 11 z | P1 = -422, p2 = 1634, p3 = -1552 | 0.9997 |
| 12 z | P1 = -1512, p2 = 5164, p3 = -4353 | 0.9838 |
FMT被固定在稳固的桌面上,以防止环境振动影响传感器读数。对于Fx、Fy和Fz方向分别进行三次测量,从 -100 N到 +100 N,步长为5 N。每个传感器的测量数据均存储到计算机中。通过在FMT中心放置砝码,或使用测力钩并悬挂砝码并通过支架上的滑轮引导钢丝来施加力。通过调整滑轮的位置,确定力的方向。
MATLAB中的基本拟合工具被用来计算二阶多项式函数,以拟合每个传感器在每个方向上的力‐电压数据。校准测量是几天后重新进行了一次,以确保力‐电压关系不会随时间发生变化。
准确性和灵敏度评估
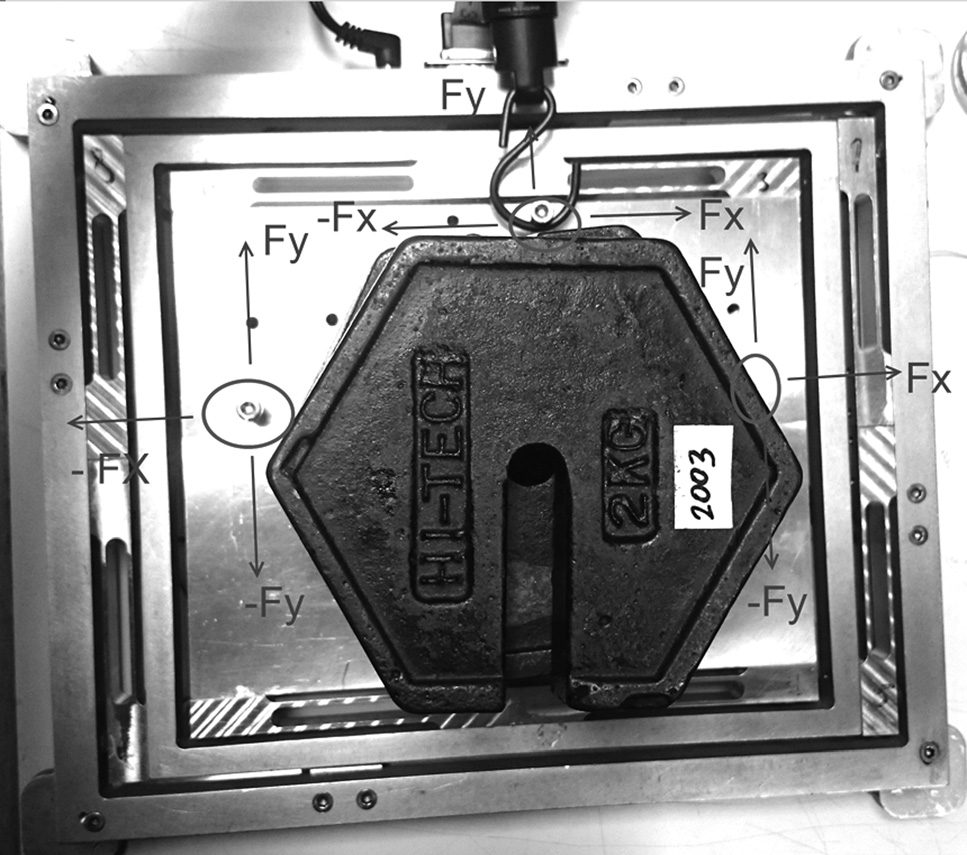
为了测试整个系统的准确性,我们在 FMT上放置了10公斤的重物以模拟腿部重量。使用弹簧秤,在加载的FMT上三个不同位置分别施加+20N和40N以及-20N和40N的力,方向为X和Y方向(图6)。每个步骤、方向和位置测得的绝对力值按方向和位置取平均值,以确定负载与准确性的关系。为了确定灵敏度,我们以20克为增量逐步在加载的FMT上增加质量,直到观察到力输出发生变化为止(图7)。

用于尸体标本关节镜组织操作技能训练的力测量系统(续)
尸体训练期间的观察
由于在关节镜检查过程中需要对腿部施加应力以在膝关节内创建操作空间,因此用于固定膝关节股骨的夹具必须能够承受这些关节应力测试力。
为了测试FMT的强度,我们邀请了两名外科医生在牛膝和人类尸体膝关节中执行导航任务。在这些实验过程中,尸体膝关节的股骨被固定在夹具中。FMT通过支撑架和两个夹具固定在桌面上。
为了研究FMT的潜力,我们进行了一项观察性研究,重点分析在插入器械和关节镜并随后执行标准导航任务过程中力分布曲线的差异和相似之处。该研究在荷兰(阿姆斯特丹医学中心)的一次关节镜课程期间,由十名住院医师参与完成。
结果
校准
表3 不同加载步在绝对X、Y和Z方向上的平均力输出
| X方向施加的力 | Y方向施加的力 | Z方向施加的力 | $\left|F_x\right|$ 均值 (标准差) | $\left|F_y\right|$ 均值 (标准差) | $\left|F_z\right|$ 均值 (标准差) |
|----------------|----------------|----------------|-------------------------------|-------------------------------|-------------------------------|
| 0 | 0 | 100 | 0.8 (1) | 0.43 (0.3) | 97 (1.7) |
| 0 | 20 | 100 | 0.9 (0.8) | 20.1 (1.8) | 96.5 (1.3) |
| 0 | 40 | 100 | 1.0 (0.8) | 40.6 (1.3) | 97.2 (1.9) |
| 0 | 0 | 100 | 0.4 (0.2) | 0.6 (0.4) | 96.4 (0.3) |
| 20 | 0 | 100 | 21.1 (0.7) | 0.5 (0.5) | 96.7 (0.6) |
| 40 | 0 | 100 | 41.6 (1.4) | 0.7 (0.2) | 96.7 (0.4) |
桌面2显示,所有校准的多项式均根据每个加载步的平均电压输出进行拟合,回归系数接近1。在第一次和第二次校准系列中,每个加载步内各次试验之间的电压输出差异小于2%。所确定的多项式被用于软件代码中,以显示施加在FMT中心的力和力矩。
系统精度和灵敏度
桌面 3显示了在三个测量位置上,沿绝对X、Y和Z方向施加不同加载步时的平均力输出。在X和 Y方向,FMT能够测量低至0.4 N的力。在Z方向,FMT能够在已有100 N载荷的基础上额外测量0.6 N的力。
摄像头跟踪系统
在两次观察测试期间,团队成功使用了该界面,并能够存储长达30秒的组合图像“NAME”.avi文件。连续的分钟。合成图像的分辨率(640×480像素)足够高,能够识别手术过程中重要的器械(尖端)移动。
尸体训练期间的观察(续)

图8显示,牛股骨和人股骨均可固定在FMT的定制夹具中。尽管硅胶夹具衬垫能在骨骼周围提供牢固的抓握,但仍需要附加销钉。这些销钉穿过骨骼,以防止在进行关节应力测试时发生轴向旋转(图8,上图)。此预防措施仅在人尸体膝关节训练时需要,因为在牛尸体膝关节上进行腿部应力测试是不必要的。
在两次培训环节中,团队均成功启动和停止了力测量,并在数据中标记了信息;并在测量结束后显示和导出存储的数据。培训后的FMT硬件和电子设备检查显示组件无损坏。
典型力曲线
从观察到的11次导航轮次中,讨论了力分布曲线中最显著的偏差。
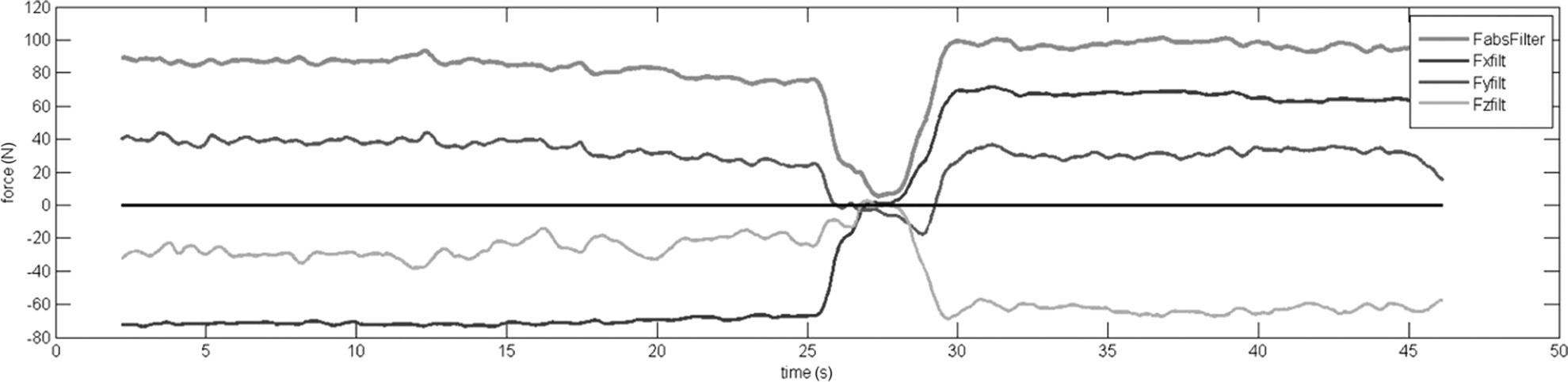
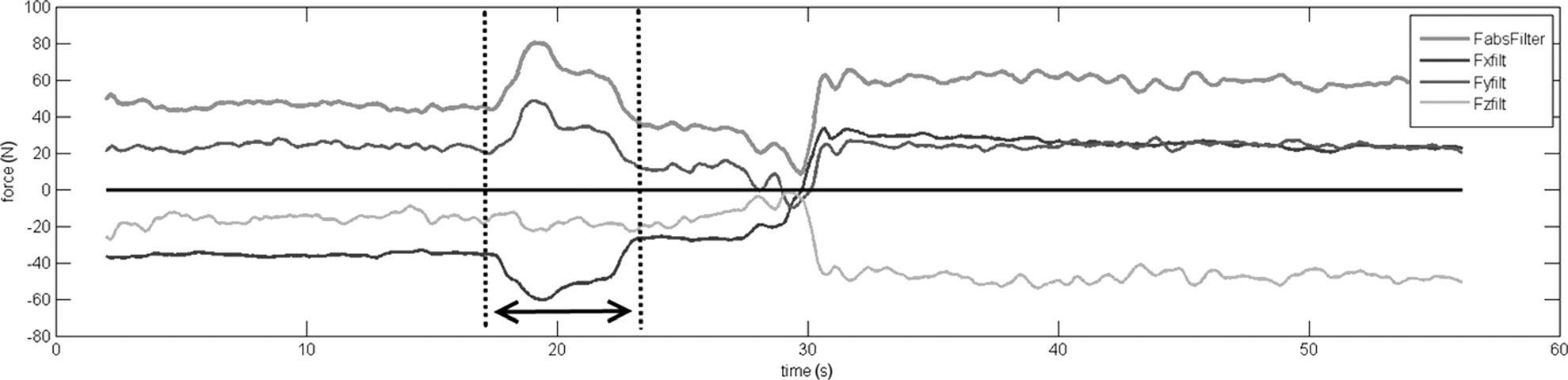
图9显示了膝关节腔室内一次高质量的检查试验。在完成内侧间室的检查并将小腿从右向左移动之前,力的大小保持恒定,这通过线条 Fyfilt表示,其值从约 -70N 变化到 +70N。当Fxtilt为 0N 时,Fyfilt和 Fzfilt下降至最小值,表明小腿有短暂(3 秒)无支撑期。在此无支撑期之后,Fxfilt和 Fyfilt的力水平基本恢复到初始水平。
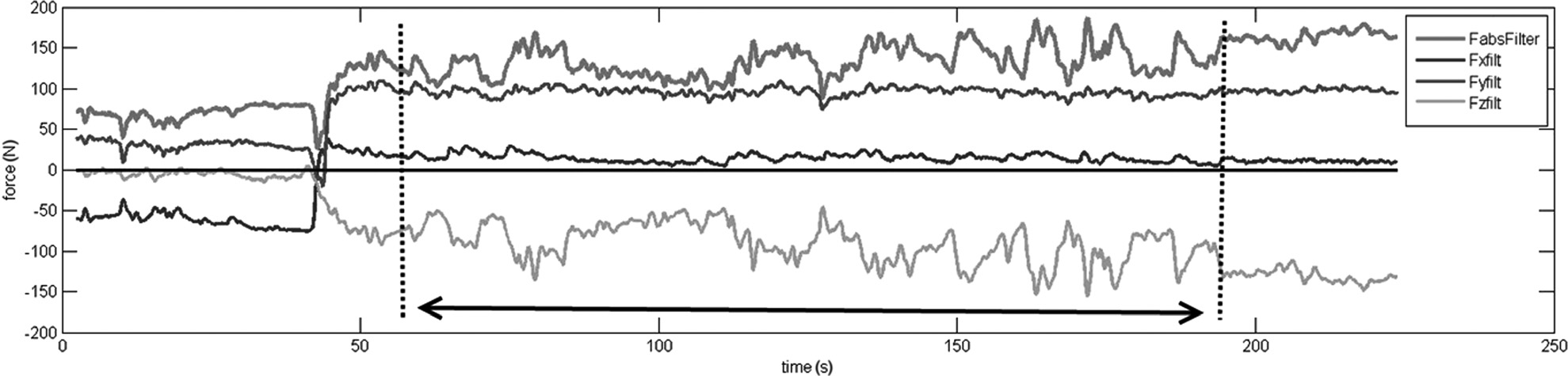
图10显示了一个在外侧间室检查开始时力波动较大的示例。视频观察表明,在箭头指出的时间段内,参与者未能穿透外侧间室的膜和组织层以到达外侧半月板。在尝试进入外侧腔室的过程中,持续约150秒的力波动高达约80N。
在另一种情况下,检查内侧间室时施加在腿部的力暂时增加(图11)。视频分析表明,参与者需要增大操作空间以检查半月板后角。
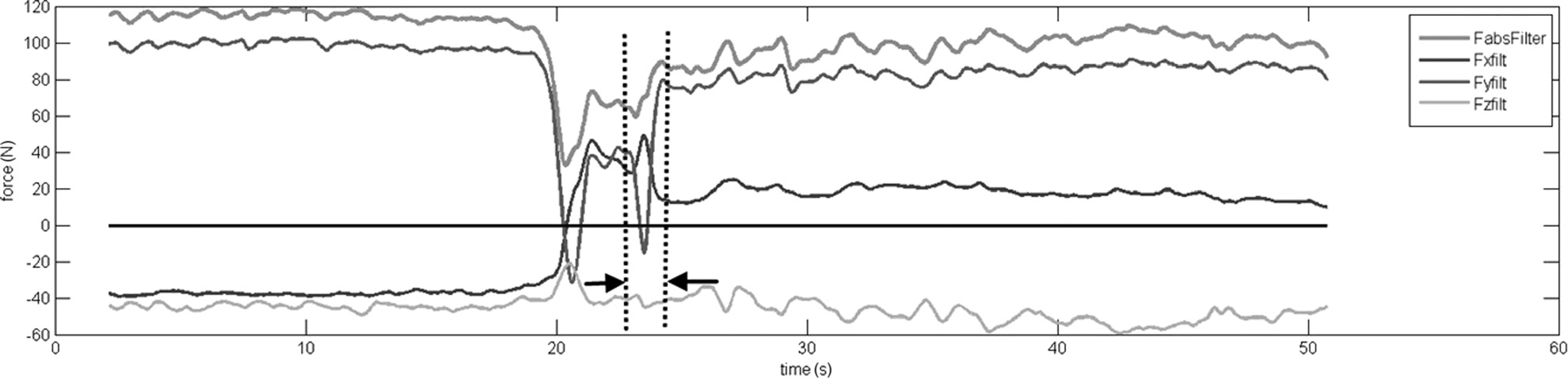
图12中黑色箭头之间的区域显示,一名参与者在切换侧边后无法将关节镜插入外侧腔室。该参与者决定在将关节镜从套管针中取出后,使用套管针销重新穿刺组织层。这导致出现了一个约40牛顿的暂时性相对力峰值。之后,该参与者能够成功地将关节镜和套管针插入外侧腔室,完成检查。
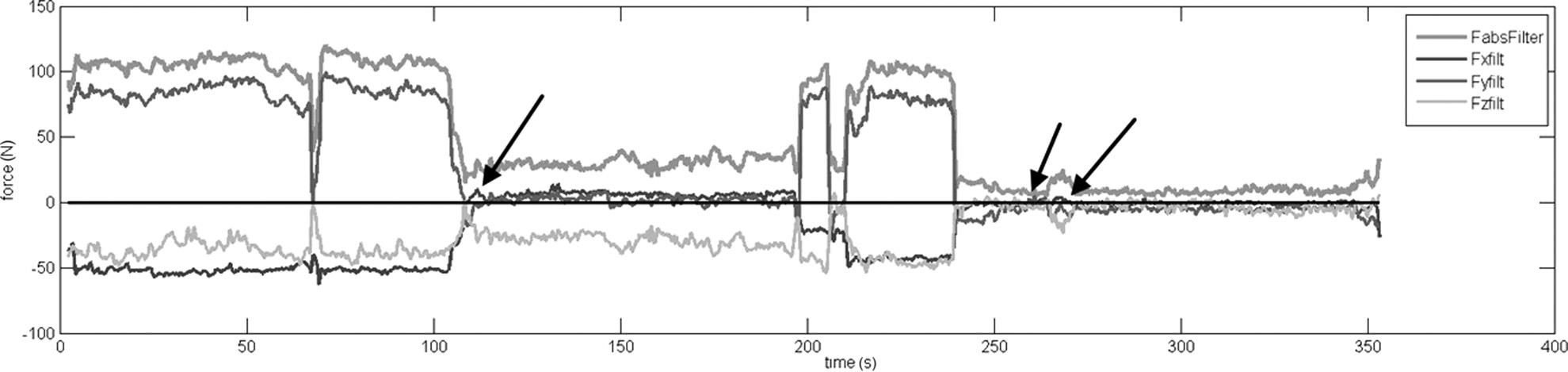
最后一个例子是一名参与者未能完成膝关节内的导航任务(图13)。在这种情况下,与其他参与者相比,力的大小要小得多,尤其是在检查外侧间室期间(图13)。此外,这是唯一一名Fxfilt 在负值和正值之间变化且正值接近于零的参与者。
讨论
设计集成—系统测试
该力测量系统在预期的培训环境中表现如常,表明该系统在技术上已具备用于教学的条件。与其他需要在工作区域附近安装大型传感器系统或使用经改造的器械以实现客观测量的培训装置相比,FMT允许住院医师进行操作训练,而无需受限于经过修改的器械或受到干扰的传感器。技术测试表明,两种不同类型的骨骼均可牢固地固定在FMT的夹具中。尽管在牛股骨上使用夹具时未发生滑动,且无需使用销钉,但仍建议始终使用销钉将股骨固定在夹具中。
设计集成—观察性研究
来自观察性研究的数据表明,如果了解良好表现的试验的特征,训练任务工作流程中的偏差在力图中是可见的。特别是,腿部施力似乎是次优表现的一个良好指标。导航任务,因为十次试验中有三次显示,腿部施力不足的学生在到达待检查组织时存在困难。其后果在图中可见,表现为腿部施力的突然变化和较长的试验时间。此外,在一次执行良好的任务试验中,检查内侧腔室和外侧腔室的时间大致相同,可以通过Y轴上力的方向进行区分。因此,如果整个任务试验耗时超过预期,可以根据Fy的符号确定在手术过程中问题出现在哪个阶段。
尽管并不总是与不良的关节应力测试相关,但组织处理不当本身会表现为力波动,主要在Z方向上达到高达80N。特别是当学员尝试使用套管针和关节镜穿刺组织层以进入关节腔时,反复出现的高力值会对健康组织和器械操作带来风险。因此,建议设定一个力安全限值,以提示这种相互作用,并告知学员采用不同的策略进入腔室。
结论
开发了一种FMT,用于测量在进行关节镜手术培训时施加在尸体标本上的力。该FMT可在不改变器械操作的前提下,实现对学员技术技能评估的客观力参数和力反馈。初步研究表明,该测量系统适用于不同类型的尸体标本。尸体研究期间的测量结果显示,较低的关节应力可能导致腔室检查过程中出现问题,而高幅值且频繁的力峰值则表明器械被不当使用以穿透组织层进入腔室。应开展一项实施研究,在标准化训练任务中采集数据,以识别受训者之间的差异,并建立通用的、可区分的力参数,用于对受训者技术技能的客观评估。

















 1069
1069

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









