




 本文结合理论知识和实践经验,探讨伺服驱动在实际应用中的常见问题,包括比例增益的影响、速度环比例和积分对负载的作用,以及惯量比的合适范围。通过对双质点系统的分析,解释了在不同情况下如何优化伺服控制器,以提升系统的稳定性和性能。
本文结合理论知识和实践经验,探讨伺服驱动在实际应用中的常见问题,包括比例增益的影响、速度环比例和积分对负载的作用,以及惯量比的合适范围。通过对双质点系统的分析,解释了在不同情况下如何优化伺服控制器,以提升系统的稳定性和性能。
1.1 概述
在控制理论的专业学习中,很少把重点放在工业现场的基础性常见问题上, 过于专注先进控制理论的数学推导和研究, 而忽略了现场常用的传统控制方法和基本调试步骤。而现场调试的工程师常常抛弃对理论的理解和掌握,放弃系统的分析,完全依赖于自己的经验采用试凑的方法进行调试。
本文将理论知识和实际的应用场景相结合,为大家例举调试中的常见问题,帮助伺服工程师观察和理解现场的实际现象,快速优化伺服控制器。
1.2 比例是大还是小?
问题一
使用一个电机A,不带负载时,如果设置比例增益参数为0.3。通过带有一定的弹性机构连接负载到该电机上,负载和电机的总惯量比空电机大,那么比例参数0.3会会显得太大了,还是太小了呢?
相关信息
由电机驱动的机械系统可以通过所谓的双质点系统进行简化描述。
这两个载荷之间的连接,即耦合,由刚度(c)和阻尼(d)来进行描述。
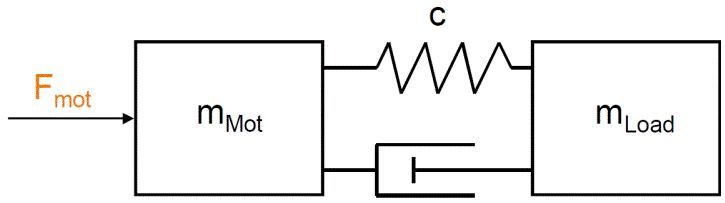
图 1‑1 双质点系统
在频域中,系统具有以下频率响应:
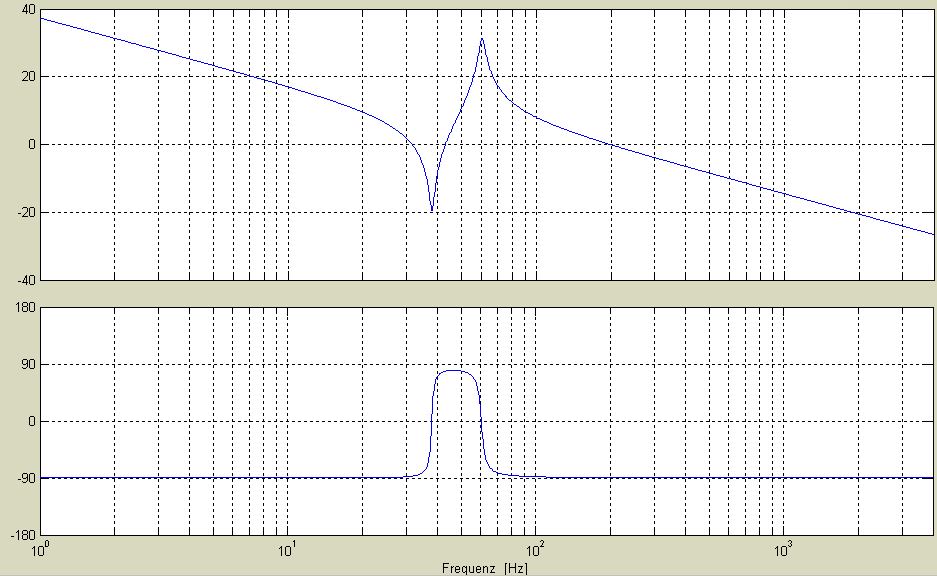
图 2-2速度控制系统频率响应
两个不同的频率,可以观测到耦合到电机的负载。
- 零点
- 极点
过了零点频率,相关负载与电机/系统解耦。这意味着,控制系统不可能在高于零点频率驱动负载,从电机到负载的能量传输断开。较低的线与较高的线相比,较低的级意味着的转动惯量更大。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1166
1166

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









