




我们有些在YouTube上看教学,还有Cypress的教学就是英文的,对于英文不好的同学怎么办?有没有办法同声传译,我来告诉大家最简单的操作:
第一步:在视频下方的设置
第二步:

第三步:

点击后,你会发现视频讲话有英文字幕了,不要高兴太早,还没有看懂
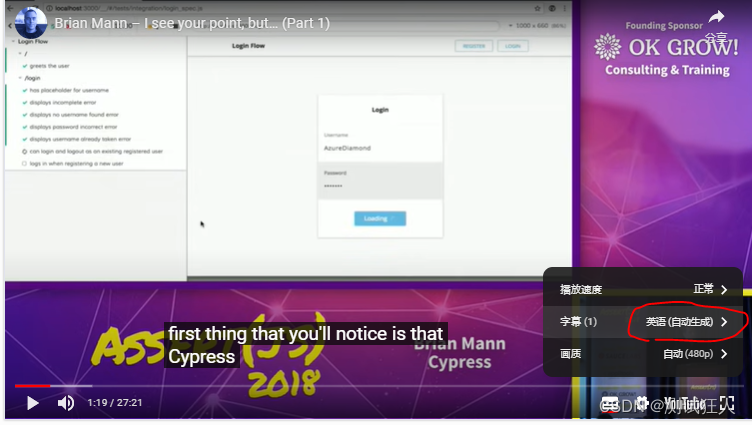
第四步:
就是把英文变为中文,不可能复制翻译,同步翻译
再次选择设置:
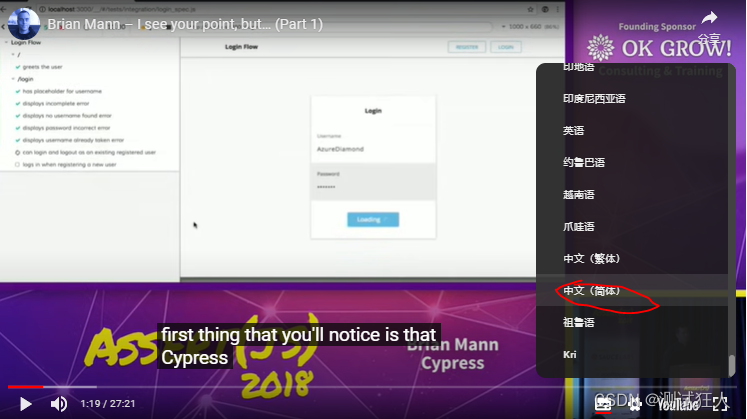
第五步:
你会看到一个自动翻译
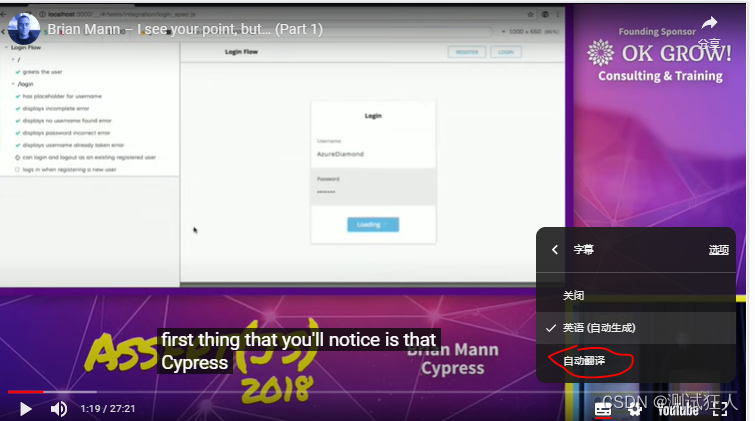
选择中文,就有中文字幕了
最后效果:
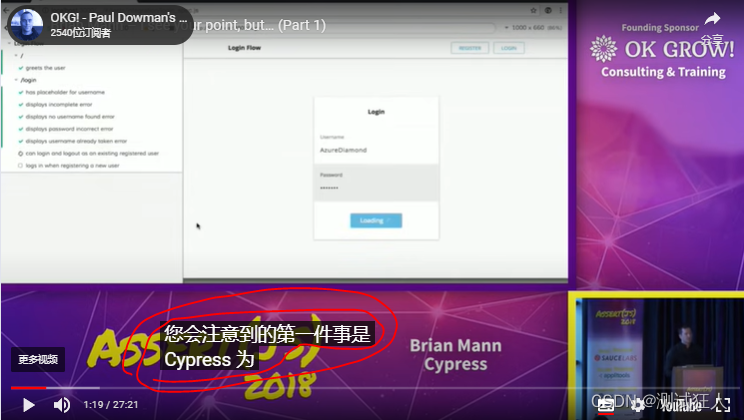
 对于英语不流利的用户,可以通过视频设置启用英文字幕,然后利用自动翻译功能将英文转为中文,实现视频内容的同步翻译,轻松理解Cypress等技术教程。
对于英语不流利的用户,可以通过视频设置启用英文字幕,然后利用自动翻译功能将英文转为中文,实现视频内容的同步翻译,轻松理解Cypress等技术教程。
我们有些在YouTube上看教学,还有Cypress的教学就是英文的,对于英文不好的同学怎么办?有没有办法同声传译,我来告诉大家最简单的操作:
第一步:在视频下方的设置
第二步:
第三步:
点击后,你会发现视频讲话有英文字幕了,不要高兴太早,还没有看懂
第四步:
就是把英文变为中文,不可能复制翻译,同步翻译
再次选择设置:
第五步:
你会看到一个自动翻译
选择中文,就有中文字幕了
最后效果:
 5924
1119
8040
5924
1119
8040























 到【灌水乐园】发言
到【灌水乐园】发言









