






大多数动态规划问题都能被归类成两种类型:
优化问题
组合问题
动态规划是自底向上,递归树是自顶向下
为什么动态规划一般都脱离了递归,而是由循环迭代完成计算。
动态规划概念
啥叫「自顶向下」?注意我们刚才画的递归树(或者说图),是从上向下延伸,都是从一个规模较大的原问题比如说 f(20),向下逐渐分解规模,直到 f(1) 和 f(2) 触底,然后逐层返回答案,这就叫「自顶向下」
啥叫「自底向上」?反过来,我们直接从最底下,最简单,问题规模最小的 f(1) 和 f(2) 开始往上推,直到推到我们想要的答案 f(20),这就是动态规划的思路,这也是为什么动态规划一般都脱离了递归,而是由循环迭代完成计算。
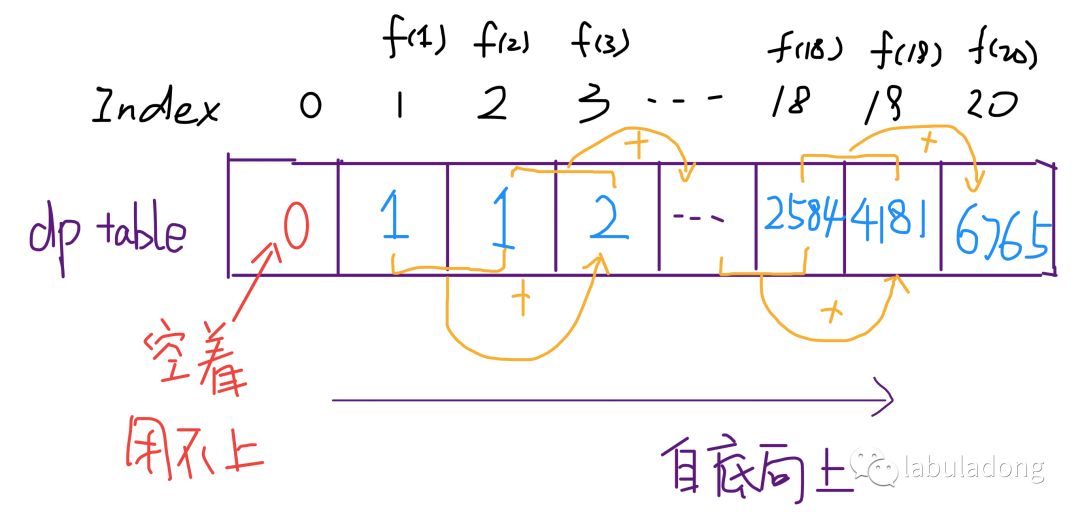
// 动态规划法计算斐波那契数列
int fib(int N) {
vector<int> dp(N + 1, 0);
dp[1] = dp[2] = 1;
for (int i = 3; i <= N; i++)
dp[i] = dp[i - 1] + dp[i - 2];
return dp[N];
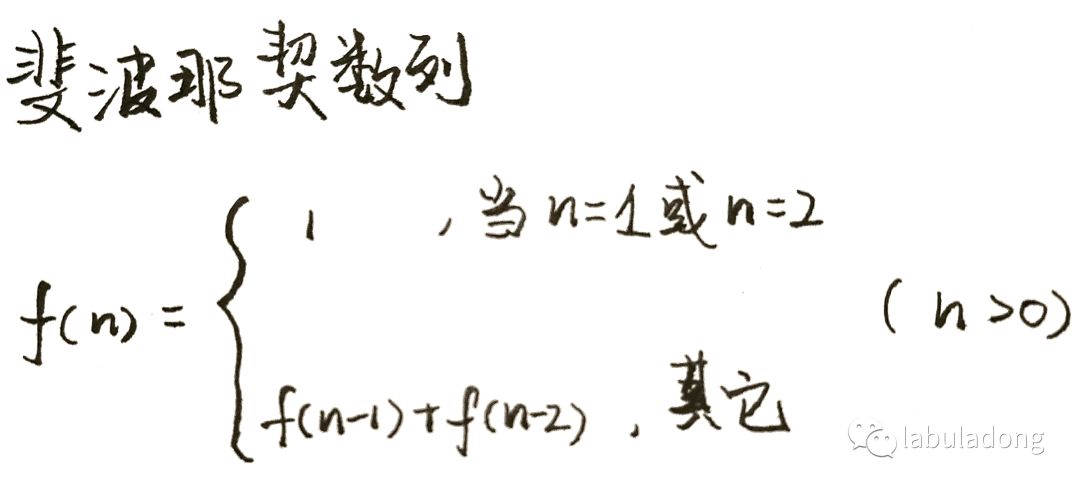
}这里,引出「状态转移方程」这个名词,实际上就是描述问题结构的数学形式:
可见列出「状态转移方程」的重要性,它是解决问题的核心。很容易发现,其实状态转移方程直接代表着暴力解法。千万不要看不起暴力解,动态规划问题最困难的就是写出状态转移方程,
计算机解决问题其实没有任何奇技淫巧,它唯一的解决办法就是穷举,穷举所有可能性。算法设计无非就是先思考“如何穷举”,然后再追求“如何聪明地穷举”。
备忘录、DP table 就是在追求“如何聪明地穷举”。用空间换时间的思路,是降低时间复杂度的不二法门,除此之外,试问,还能玩出啥花活?

















 2583
2583

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









