







Task
定义一种在三维形状中,新的点云运算方法。
问题
(1) 三维点云是一种无序,无结构的三维形状表达方式,因此不能提供一种统一的运算方式。
(2)之前的一些方法,在对三维点云进行一些操作,例如放缩和平移的时候,就会影响计算的效果。
解决方法
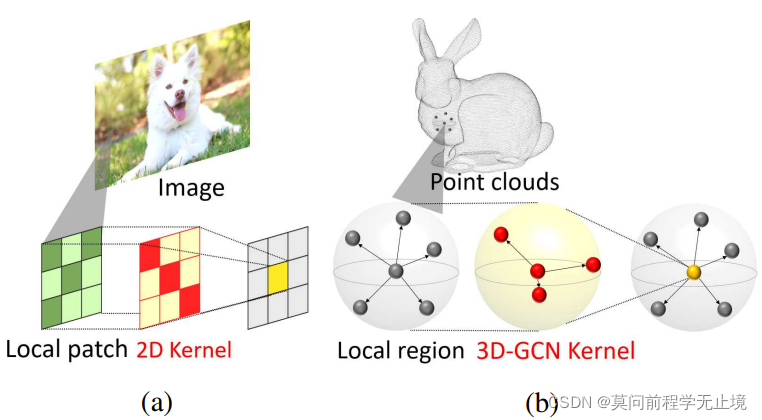
(1)利用一个可变形的3D核去学习3D点云的信息。
(2)提出了一个基于图的最大池化的方法去处理不同的尺度信息。
方法
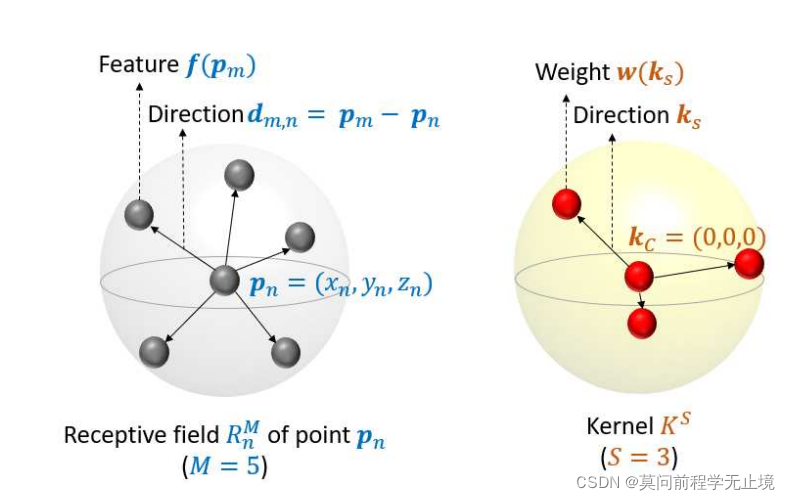
作者自定义了图卷积的感受野,即对于一个三维形状中的每一个点,作者固定了其周围的最近邻的M个点作为其感受野。此外,作者模仿2D CNN的图,做了一个类似的3D点云的Kernel。用这种方法去模拟卷积在二维上的操作。如上图右边所示,是定义的Kernel。
作者定义的GCN的公式:

即,对应的一个感受野和kernel的卷积操作。其中f(pn)代表的是点云形状中,每一个点的特征,Kc代表的是卷积核中的点。要计算内积,此外还需要计算两个点对应的向量的余弦相似度g(A),下图sim总结了计算过程。
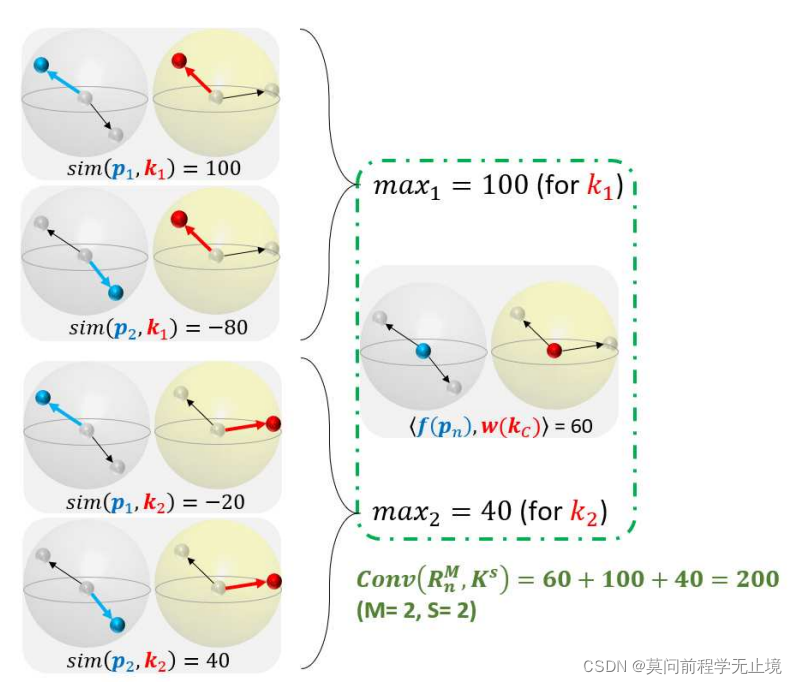
计算公式如下所示:

思索
记录一下我觉得比较新的几个点:
(1)将图像的patch和卷积核的相乘看作是求两者之间的相似度,从而去求算点云的向量间的余弦相似度
(2)感受野,将点云的感受野定义为一个小的graph内,点之间向量的集合。
问题:
我读完之后对核的来由不是特别清楚,文中说了一开始定义w(k) = 1。我猜猜是给定初始值,之后根据学习来进行调整。其次关于为什么要使用L个kernel,我现在还不是特别的清楚,我个人认为,如果与卷积类似,那么使用一个就足够了。下文作者也提到了,使用L个卷积是为了进行最大池化操作,我还没有特别理解
参考文献
[1] Lin Z H, Huang S Y, Wang Y C F. Convolution in the cloud: Learning deformable kernels in 3d graph convolution networks for point cloud analysis. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 1800-1809.
github: https://github.com/j1a0m0e4sNTU/3dgcn

















 1625
1625

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









