




随着自动驾驶技术的不断发展,基于摄像头的感知系统已成为关键,而Bird’s Eye View (BEV)大模型在其中发挥着重要作用。BEV大模型是一种将摄像头捕捉到的2D图像转换为自上而下视角的3D感知的技术,使得车辆能够更好地理解周围环境。
BEV大模型通过提升环境感知能力、增强决策和规划、降低硬件依赖以及推动技术创新,显著加速了自动驾驶汽车的发展进程。
本文分享不同视角的BEV的最新研究论文研究,旨在为学习BEV、端到端的学员分享一些内容参考。
mer: Learning Bird's-Eye-View Representation from Multi-Camera Images via Spatiotemporal Transformers
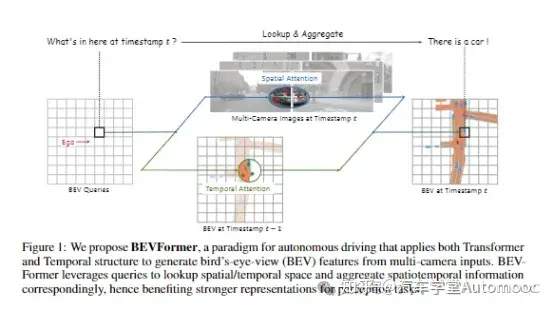
BEVFormer是一种基于多相机图像的自动驾驶视觉感知新方法。该方法利用Transformer和时序结构生成鸟瞰视图(BEV)特征,支持多种自动驾驶感知任务。BEVFormer通过空间和时间查询与空间和时间空间进行交互,聚合时空信息,从而获得更强大的表示能力。在nuScenes测试集上,该方法达到了新的技术水平,超越了以前的最优方法,并与激光雷达基准方法的性能相当。
完整论文下载,BEVForme
CenterNet: Keypoint Triplets for Object Detection
本文提出了一种名为CenterNe
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 590
590

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









