 地图多点位跳转高亮卡顿问题解决
地图多点位跳转高亮卡顿问题解决




需求:外部指定多个点位进行跳转到地图并高亮。
1.如果存在聚合状态下的点位,需要放大地图到所有高亮点均不处于聚合(或者放大到最大层级依然聚合,这种情况不去考虑,无实际物理意义)
2.大量高亮点要求不卡顿。
3.其他业务逻辑不再展开说明。
先不比比,先上图
分析:
1.只分析这批设备的点位是当前地图的情况下,并且解决卡顿的思路,其他业务逻辑不必赘述。
2. 思路:用当前层级判断点位是否聚合,如果聚合,则放大地图层级,再次验证,直至不聚合或者到达最大缩放层级。
(能实现但是解决不了点位多时卡顿问题,而且这种方式比较挫,属于赶时间强行实现,不需要的同学可以去后面看方案优化!!!!!)
Day1实现:
/*
* @param devList Array 设备数组 包含deviceId
* @param mapHierarchy Number|String 地图层级
* */
async locateToCamera(devList, mapHierarchy){
// 定义检查某个设备是否为聚合状态
const isDeviceNoClustered = item => {
const cluster = this.findClusterByDeviceId(item.deviceId)
// 非聚合状态时 features 长度为 1
return !cluster || cluster.get('features').length === 1
}
// 等待渲染稳定的函数
const waitForStability = () => new Promise(resolve => setTimeout(resolve, 500))
// 更新视图并等待渲染完成的函数
const updateViewAndWaitForRender = (zoomLevel, devList) => {
return new Promise(resolve => {
// 随便用一个点位更新视图,放大过程中用任意点即可
const firstDeviceId = devList[0].deviceId
const marker = this.cadMap.getMarkerById(firstDeviceId)
if (marker) {
const { pointX, pointY } = marker.get('payload')
this.cadMap.viewAnimate({
center: [pointX, pointY],
zoom: zoomLevel
})
// 使用 requestAnimationFrame 确保渲染完成
const checkRenderComplete = () => {
requestAnimationFrame(() => {
this.cadMap.map.once('rendercomplete', resolve)
})
}
checkRenderComplete()
}
})
}
let allDevicesNoClustered = false
let zoom
let currentZoom = this.cadMap.getView().getZoom()
let defaultZoom = parseFloat(mapHierarchy)
if (devList.length > 0) {
// 确保默认层级小于当前层级时,直接跳转到当前层级
zoom = currentZoom >= defaultZoom ? currentZoom : defaultZoom
// 循环增加层级,直到所有点位都非聚合
while (!allDevicesNoClustered && zoom < 16) {
// 更新视图并等待渲染完成
await updateViewAndWaitForRender(zoom, devList)
// 等待视图稳定
await waitForStability()
// 检查是否所有点位已经非聚合
allDevicesNoClustered = devList.every(isDeviceNoClustered)
if (!allDevicesNoClustered) {
zoom += 1 // 放大层级
}
}
// 查找第一个达到非聚合状态的点位
const nonClusteredDeviceId = devList.find(isDeviceNoClustered)
// 最终定位到该点位
if (nonClusteredDeviceId) {
const marker = this.cadMap.getMarkerById(nonClusteredDeviceId)
if (marker) {
const { pointX, pointY } = marker.get('payload')
this.cadMap.viewAnimate({
center: [pointX, pointY],
zoom
})
}
}
}
}
其中cadMap是 CadMap类生成的对象,部分方法如下:
export default class CadMap extends Emitter {
constructor(url, options = {}) {
super()
if (!url) {
throw new Error('ImageMap need url option')
}
this._mapServiceUrl = url
this._options = {
cluster: true,
...options
}
this.map = null
this.layer = null
this.source = null
this.marker = null
this.popup = null
this.overviewMapControl = null
this.featureDraggable = false
this.clickTimeout = null
}
...
// 通过设备id获取到指定设备对应的要素feature
getMarkerById(id) {
const source = this.getSource()
return source.getFeatureById(id)
}
// 获取数据源
getSource() {
// isCluster 代表是否开启聚合
const { cluster: isCluster } = this.options_
if (isCluster && this.clusterLayer.getVisible()) {
return this.clusterLayer.getSource().getSource()
} else {
return this.vectorLayer.getSource()
}
}
// 动画
viewAnimate(AnimationOptions) {
this.map.getView().animate({
...AnimationOptions,
duration: 500
})
}
// 设置点位高亮状态
setActive(value, changeImmediate = true) {
this.active_ = value
changeImmediate && this.changed()
}
...
}
当数据量正常时正常展示,当数据量大时这个具体的卡顿程度就不展示了,大概需要几分钟甚至更久。
对需求时只是说上限50个点位进行跳转,本机测试大概3-4s,还能接受,但是现网上面100甚至更多点位,这个时长就非常感人了
就着手分析一下卡顿原因
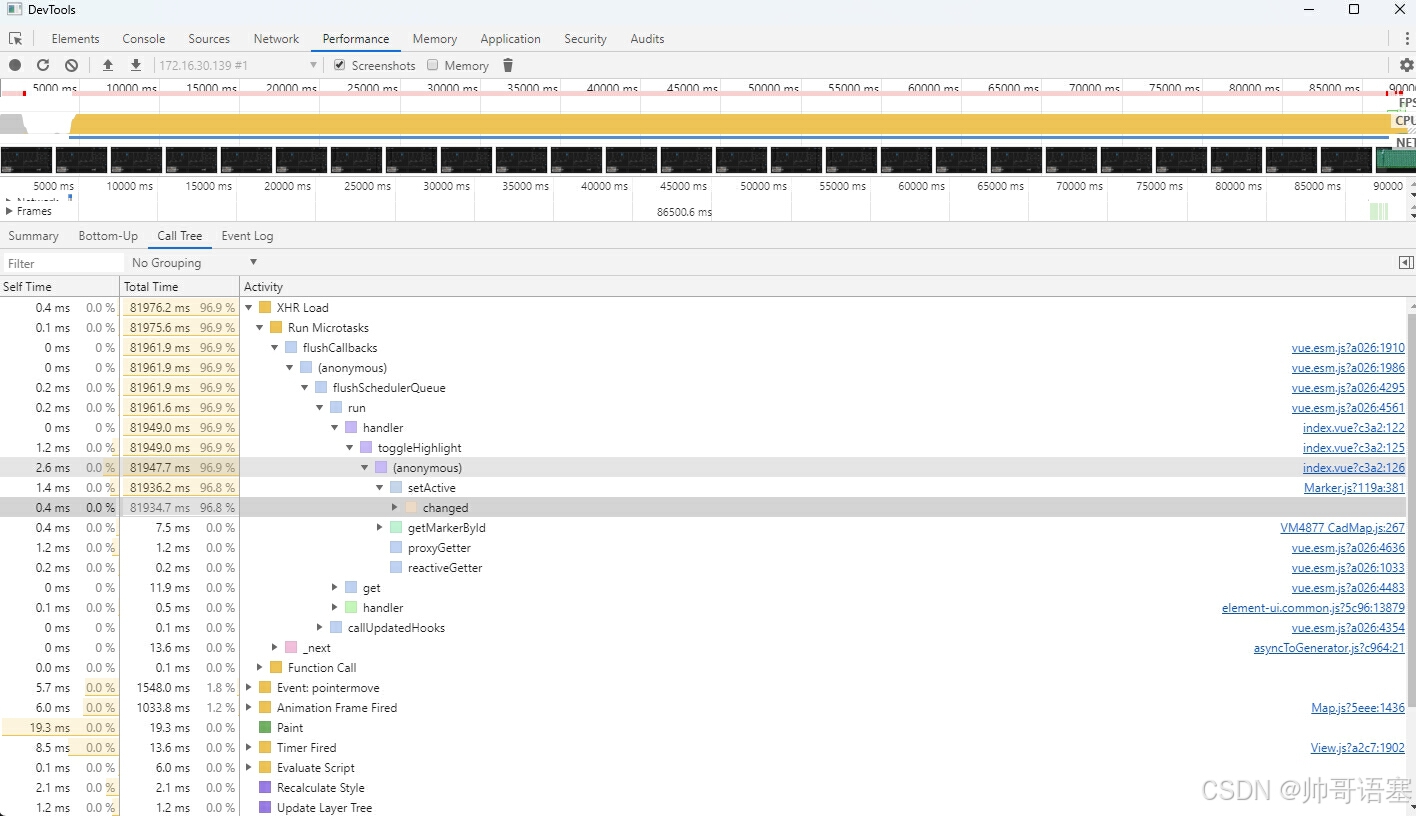
通过定位可知是 监听设置需要高亮的点位会设置每个要素的active,然后地图上每一个点位变更都会引起重绘,也就是openlayer内部的changed方法,所以我们可以试着最后一次性再设置acitve
activeDeviceList: {
handler(newVal, oldVal) {
const toggleHighlight = (info, isActive) => {
info.forEach((item, index) => {
const feature = this.cadMap.getMarkerById(item.deviceId)
feature && feature.setActive(isActive, index === info.length - 1)
})
}
if (!this.cadMap?.map) return
// 如果旧值为空,则只需要高亮新值
if (!oldVal.length) {
if (newVal.length) toggleHighlight(newVal, true)
}
// 如果有旧值,则取消旧值的高亮,再高亮新值
else {
toggleHighlight(oldVal, false)
if (newVal.length) toggleHighlight(newVal, true)
}
},
deep: true,
immediate: true
}
解决了卡顿问题,然后还有高亮点在聚合内部该如何展现呢?
当前的聚合代码如下:
...
import { Cluster as ClusterSource, Vector as VectorSource } from 'ol/source'
...
if (isCluster) {
const clusterSource = new ClusterSource({
distance: 40,
source: new VectorSource()
})
this.clusterLayer = new VectorLayer({
source: clusterSource,
zIndex: 100,
style: clusterStyle
})
this.vectorLayer.setVisible(true)
this.map.addLayer(this.clusterLayer)
}
试着从样式回调
function clusterStyle(feature) {
const features = feature.get('features')
const size = features.length
if (size > 1) {
const activeFeatures = features.filter(f => f.getActive())
return new Style({
image: new Icon({
crossOrigin: 'anonymous',
src: require('@/assets/img/cadMap/cluster_bg.png'),
size: [40, 40]
}),
text: new Text({
text: (size - activeFeatures.length).toString(),
fill: new Fill({
color: '#ffffff'
}),
font: '16px Inter-Regular'
})
})
} else {
const originalFeature = feature.get('features')[0]
const active = originalFeature.getActive()
return createStyle(originalFeature.get('payload'), {
alarm: false,
active
})
}
}
在这边可以按照聚合点内部的高亮点位的数量,去计算剩余聚合的数量,但是发现好像不生效,聚合点仍然包含高亮点,只是数量对上了,所以就想办法改造一下这个方法,结果发现该方法只支持返回一种类型,要么正常点位样式,要么聚合点位样式,不支持组合点位,所以想办法从openlayer的Cluster 入手
import { Cluster } from 'ol/source'
import { createEmpty, createOrUpdateFromCoordinate, buffer } from 'ol/extent'
import { getUid } from 'ol'
export default class CustomCluster extends Cluster {
/**
* @param {Options} options Cluster options, with an additional canCluster function.
* @param {function(Feature): boolean} options.canCluster A function that determines whether
* the feature should be clustered. It should return true to allow clustering and false to prevent it.
*/
constructor(options) {
super(options)
/**
* @type {function(Feature): boolean}
* @private
*/
this.canCluster =
options.canCluster ||
function () {
return true // Default is to allow clustering.
}
}
/**
* @protected
*/
cluster() {
if (this.resolution === undefined || !this.source) {
return
}
const extent = createEmpty()
const mapDistance = this.distance * this.resolution
const features = this.source.getFeatures()
/** @type {Object<string, true>} */
const clustered = {}
for (let i = 0, ii = features.length; i < ii; i++) {
const feature = features[i]
if (!(getUid(feature) in clustered)) {
const geometry = this.geometryFunction(feature)
if (geometry) {
const coordinates = geometry.getCoordinates()
createOrUpdateFromCoordinate(coordinates, extent)
buffer(extent, mapDistance, extent)
if (this.canCluster(feature)) {
const neighbors = this.source.getFeaturesInExtent(extent).filter(neighbor => {
if (!this.canCluster(neighbor)) {
return false
}
const uid = getUid(neighbor)
if (uid in clustered) {
return false
}
clustered[uid] = true
return true
})
this.features.push(this.createCluster(neighbors, extent))
} else {
const uid = getUid(feature)
clustered[uid] = true
this.features.push(this.createCluster([feature], extent))
}
}
}
}
}
}
继承一下原来的Cluster类,扩展 canCluster 方法,代表是否聚合,此时外部生成聚合图层时加上刚刚判断的高亮状态即可
const clusterSource = new CustomCluster({
distance: 40,
source: new VectorSource(),
canCluster: feature => {
return !feature.getActive()
}
})
此时当我处于高亮状态时,无论缩放地图,高亮点不会进入聚合点。
到此功能已经完全实现。

















 3696
3696

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









