



 本文介绍了一种使用SQL查询每个气象站中最小偏差模式名的方法。通过创建一个临时表来存储每个站的最小绝对误差,然后将此表与原始数据表进行内连接,以找到对应最小偏差的具体模式名。
本文介绍了一种使用SQL查询每个气象站中最小偏差模式名的方法。通过创建一个临时表来存储每个站的最小绝对误差,然后将此表与原始数据表进行内连接,以找到对应最小偏差的具体模式名。
表为:
列名:站号,模式名,偏差,日期,要素
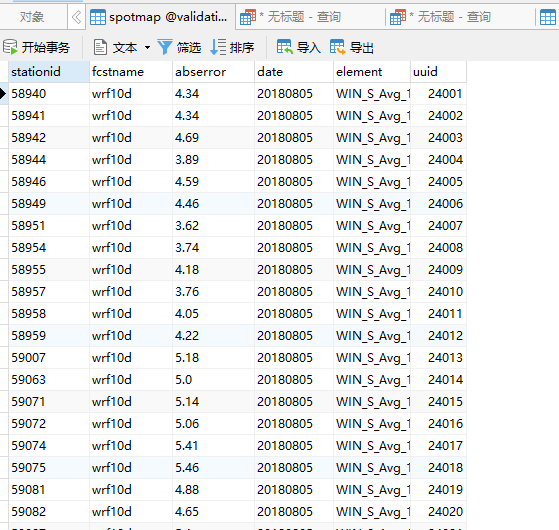
试图查询每个站中最小的那个偏差的模式名
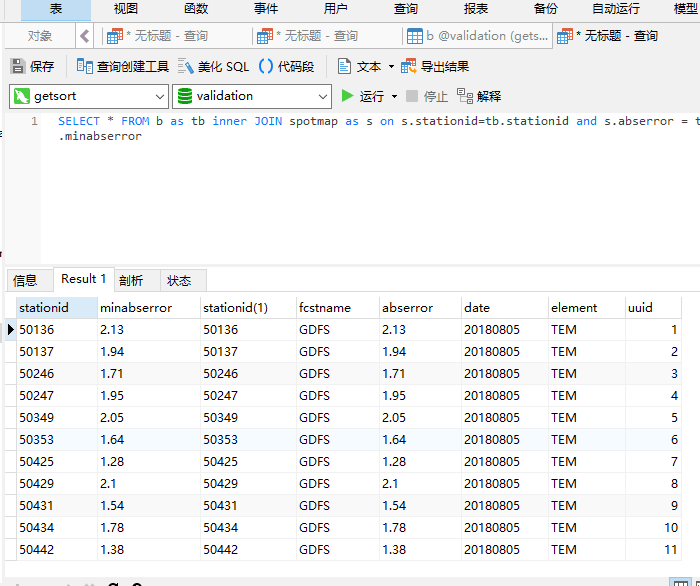
create table B as SELECT stationid,min(abserror) as minabserror FROM `spotmap` WHERE element = 'tem' group by stationid 结果生成表b

SELECT * FROM b as tb inner JOIN spotmap as s on s.stationid=tb.stationid and s.abserror = tb.minabserror查出结果

















 889
889

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









