




 本文介绍如何为树莓派配置WiringPi库,包括将交叉编译工具链加入环境变量、将WiringPi静态库添加到arm交叉编译工具的库目录以及生成所需的软连接。
本文介绍如何为树莓派配置WiringPi库,包括将交叉编译工具链加入环境变量、将WiringPi静态库添加到arm交叉编译工具的库目录以及生成所需的软连接。
准备
- arm交叉编译工具链
- WiringPi库
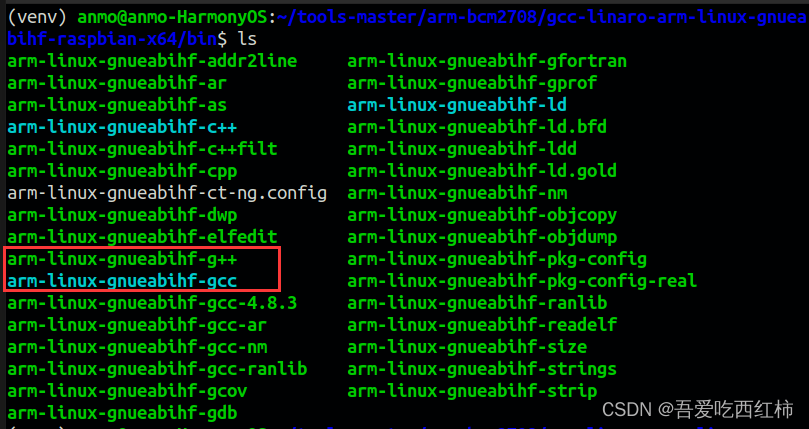
一、将交叉编译工具链加入环境变量
PS:这里使用的是为树莓配定制的编译器,如果使用其他的编译器(例如通用的linaro系列编译器),就把相应的编译器bin路径加入到环境变量即可。
-
查看交叉编译工具链所在路径
-
将交叉编译工具链所在路径加入到环境变量,令其全局可用
(1)打开.bashrc文件
sudo vi ~/.bashrc
(2)添加路径,注意自己的路径
export PATH=/home/你的用户名/tools-master/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin:$PATH
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 880
880

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









