







 本文深入讲解了线段树的数据结构,包括单点更新、区间查询和区间更新的实现方法。通过具体的代码示例,详细解释了如何利用线段树解决区间问题,以及如何通过push_down和push_up操作优化区间更新过程。
本文深入讲解了线段树的数据结构,包括单点更新、区间查询和区间更新的实现方法。通过具体的代码示例,详细解释了如何利用线段树解决区间问题,以及如何通过push_down和push_up操作优化区间更新过程。


void modify(int p, int l, int r, int x, int v)
{
s[p] += v;
if (l == r) return; //叶结点则退出
int mid = (l + r) / 2;
if (x <= mid) //判断x在左儿子还是右儿子
modify(p * 2, l, mid, x, v);
else
modify(p * 2 + 1, mid + 1, r, x, v);
}
也可以push_up,将儿子节点的信息更新到父亲节点
void up(int p)
{
s[p] = s[p * 2] + s[p * 2 + 1];
}
void modify(int p, int l, int r, int x, int v)
{
if (l == r)
{
s[p] += v;
return;
}
int mid = (l + r) / 2;
if (x <= mid)
modify(p * 2, l, mid, x, v);
else
modify(p * 2 + 1, mid + 1, r, x, v);
up(p);
}
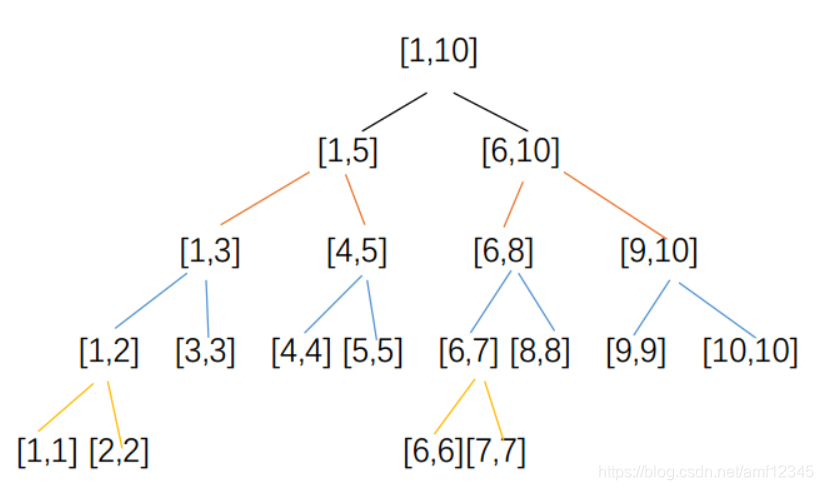
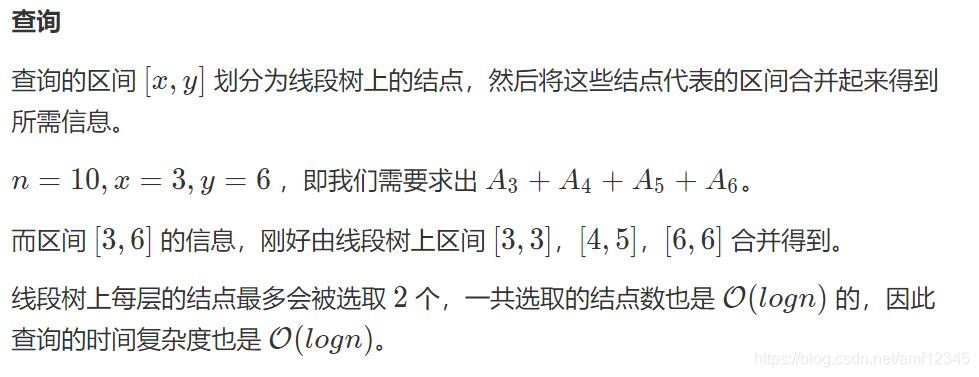 查询的区间[x,y]划分为线段上的节点,然后将这些节点代表的区间合并起来得到所需的信息
查询的区间[x,y]划分为线段上的节点,然后将这些节点代表的区间合并起来得到所需的信息
n=10,x=3,y=6,即我们需要求出A3+A4+A5+A6;
而区间[3,6]的信息,刚好由线段树上区间[3,3],[4,5],[6,6]合并得到
线段树上每层节点最多会被选取两个,一共选取的结点数也是O(logn)的,因此查询的时间复杂度也是O(logn).
int query(int p, int l, int r, int x, int y)
{
if (x <= l && r <= y) return s[p];//若该结点被查询区间包含
int mid = (l + r) / 2, res = 0;
if (x <= mid) res += query(p * 2, l, mid, x, y);
if (y > mid) res += query(p * 2 + 1, mid + 1, r, x, y);
return res;
}
线段树的模板如下:
#include <iostream>
using namespace std;
const int MAX_N=10010;
int s[4*MAX_N];
void up(int p){//合并左右两个子节点的区间 可以改成维护区间最大值、最小值
s[p]=s[p*2]+s[p*2+1];
}
//修改区间上某个单点值
void modify(int p,int l,int r,int x,int v){
//plr为当前更新到的结点、左右端点、x为需要修改的叶子结点左端点,v为要增加的值
if(l==r){
//若当前更新点的左右端点相等即到叶子节点时,直接更新信息并返回
s[p]+=v; //这里为单点更新修改值,可以根据题目改成赋值
return;
}
int mid=(l+r)/2;
if(x<=mid){
modify(p*2,l,mid,x,v);
}else{
modify(p*2+1,mid+1,r,x,v);
}
up(p);
}
int query(int p,int l,int r,int x,int y){
//plr为当前更新到的结点,左右端点、xy为要查询的区间
if(x<=l&&r<=y){
return s[p];
}
int mid=(l+r)/2,res=0;
if(x<=mid){
res+=query(p*2,l,mid,x,y);
}
if(y>mid){
res+=query(p*2+1,mid+1,r,x,y);
}
return res;
}
int main() {
int n;
cin>>n;
//输入n个数,并将这些数更新到线段树的结点中
for(int i=1;i<=n;i++){
int d;
cin>>d;
modify(1,1,n,i,d);
}
//输入查询个数
int q;
cin>>q;
while(q--){
int d,x,y;
cin>>d>>x>>y;
if(d==0){
modify(1,1,n,x,y);
}else{
cout<<query(1,1,n,x,y)<<endl;
}
}
return 0;
}
上面讲过线段树的单点更新方法以及区间的查询操作。同理,区间更新也可以分割成若干个子区间,每层的结点至多选取两个,时间复杂度为O(logn)
下面的代码就是线段树区间更新的一个例子
void up(int p)
{
if (!p) return;
s[p] = s[p * 2] + s[p * 2 + 1];
}
void down(int p, int l, int r)
{
if (col[p])
{
int mid = (l + r) / 2;
s[p * 2] = col[p] * (mid - l + 1);
s[p * 2 + 1] = col[p] * (r - mid);
col[p * 2] = col[p * 2 + 1] = col[p];
col[p] = 0;
}
}
void modify(int p, int l, int r, int x, int y, int c)
{
if (x <= l && r <= y)
{
s[p] = (r - l + 1) * c; //仅修改该结点
col[p] = c; //增加标记,子结点待修改
return;
}
down(p, l, r); //下传lazy标记
int mid = (l + r) / 2;
if (x <= mid) modify(p * 2, l, mid, x, y, c);
if (y > mid) modify(p * 2 + 1, mid + 1, r, x, y, c);
up(p);
}
注意到:push_down一般在访问子节点前执行,起到下传懒惰(延迟)标记的作用
push_up在访问完子结点后执行,将两个区间的信息合并起来,得到该区间的信息。
线段树区间更新的模板
#include <iostream>
using namespace std;
const int MAX_N = 10010;
int s[4 * MAX_N],col[4 * MAX_N];
void up(int p){
s[p] = s[p * 2] + s[p * 2 + 1];
}
void down(int p, int l, int r){
if(col[p]){
int mid = (l + r) / 2;
s[p * 2] += col[p] * (mid - l + 1);
s[p * 2 + 1] += col[p] * (r - mid);
col[p * 2] += col[p];
col[p * 2 + 1] += col[p];
col[p] = 0;
}
}
void modify(int p,int l,int r,int x,int y,int c){
if(x <= l && r <=y){
s[p] += (r - l + 1) * c;
col[p] += c;
return;
}
down(p, l, r);//延迟标记
int mid = (l + r)/2;
if(x <= mid){
modify(p * 2, l, mid, x, y, c);
}
if(y > mid){
modify(p * 2 + 1, mid + 1,r,x,y,c);
}
up(p);
}
int query(int p,int l,int r,int x,int y){
if(x <= l && r <= y){
return s[p];
}
down(p,l,r);
int mid = (l + r) / 2, res = 0;
if(x <= mid){
res += query(p * 2, l,mid,x,y);
}
if(y > mid){
res += query(p * 2 + 1,mid + 1,r,x,y);
}
return res;
}
int main() {
int n;
cin>>n;
for(int i=1;i<=n;++i){
int d;
cin>>d;
modify(1,1,n,i,i,d);
}
int q;
cin>>q;
while(q--){
int d,x,y,c;
cin>>d>>x>>y;
if(d == 0){
cin >> c;
modify(1,1,n,x,y,c);
}else{
cout<< query(1,1,n,x,y)<<endl;
}
}
return 0;
}

















 800
800

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









