



 本文详细介绍了Python中导入模块、包的概念,通过实例展示`__init__.py`如何使文件夹结构成为可导入的软件包,并探讨了不同层级包含`__init__.py`的影响。
本文详细介绍了Python中导入模块、包的概念,通过实例展示`__init__.py`如何使文件夹结构成为可导入的软件包,并探讨了不同层级包含`__init__.py`的影响。
基本概念
概念 解释
import 即导入,方式就是在import位置将代码文件拷贝过去。
模块 python中一个.py文件就是一个模块
包 指软件包,举例import matplotlib.pyplot中(其中pyplot非函数,至少是一个模块或者包),matplotlib就是一个软件包。
先上结论
init.py的作用是让一个呈结构化分布(以文件夹形式组织)的代码文件夹变成可以被导入import的软件包。
举例解释
为了形象地解释,我建立了一个test文件夹,其中一个文件夹A打算建立成一个软件包,然后尝试在B文件夹的的run.py文件下导入A包中的模块。
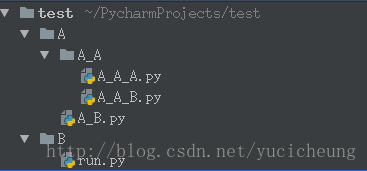
实验一:不包含__init__.py
test文件夹中包含的文件如下:
此时如果在B/run.py中运行以下语句的结果为:
语句 运行结果
import A ImportError: No module named A
import A.A_A ImportError: No module named A.A_A
import A.A_B ImportError: No module named A.A_B
结论:此时A并不能被当成是一个软件包。
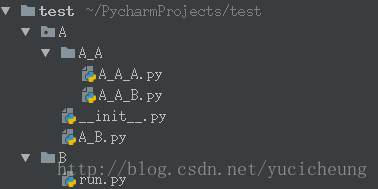
实验二:A中包含__init__.py
A文件夹下包含__init__.py,test文件夹结构变为如下:
在B/run.py中运行以下语句的结果依次列在表中:
语句 运行结果
import A 成功
import A.A_A ImportError: No module named A_A
import A.A_B 成功
结论:由A.A_B能被成功import看出此时A已经是一个软件包,因为A下的.py文件已经能够程序识别出来。但是由于A下的A_A还不是一个软件包,所以A.A_A还不能被导入。
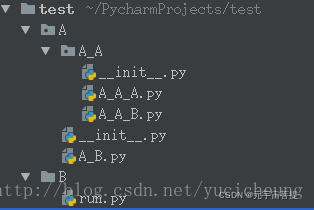
实验三:A.A_A中也包含__init__.py
A文件夹及其子文件夹下都包含__init__.py,test文件夹结构变为如下:
l
在B/run.py中运行以下语句的结果依次为:
语句 运行结果
import A.A_B 成功
import A.A_A 成功
import A.A_A.A_A_A 成功
结论:此时A及其子文件夹A_A都成功变成软件包,其中的模块可以被任意导入。

















 5588
5588

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









