




这是下面这篇文章的继续。
前面我们提到,如何解决你没有API版大模型,或者你的API版大模型太弱,而你只有Web版本的诸如 Kimi/GPT4 的情况下,改如何让AutoCoder帮助你完成编程?
我们有两个办法,第一个是去掉 execute/auto_merge 两个参数。这个时候你可以在 target_file 里找到你的prompt,拖拽到 Web版里就行。生成的代码,你基本上可以直接复制黏贴过来。
但是,你可能希望比如自动合并等环节还是让 AutoCoder做掉,该怎么办呢?这里我们有一个新参数叫 human_as_model。我们来看看怎么用:
source_dir: /tmp/t-py
target_file: /home/winubuntu/projects/ByzerRawCopilot/output.txt
model: qianwen_chat
model_max_length: 2000
model_max_input_length: 6000
anti_quota_limit: 5
search_engine: bing
search_engine_token: ENV {{BING_SEARCH_TOKEN}}
## execute the prompt generated by auto-coder
execute: true
## extract the code from the prompt generated by auto-coder
## and overwrite the source code
auto_merge: true
project_type: py
human_as_model: true
query: >
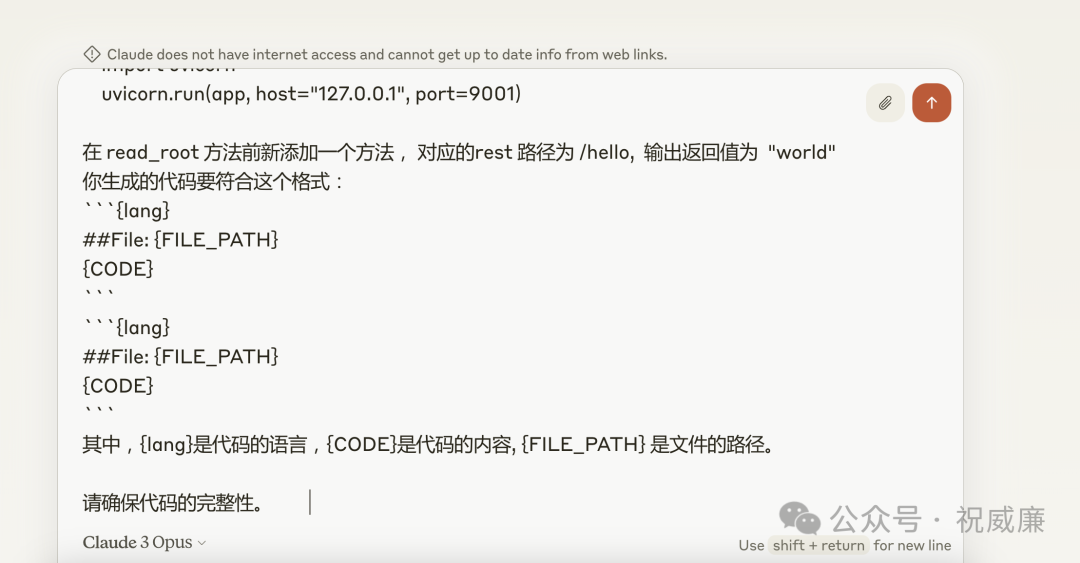
在 read_root 方法前新添加一个方法,
对应的rest 路径为 /hello,
输出返回值为 "world"
这里相比以前,就多了一个 human_as_model 参数,我们把他设置为 true。现在我们希望添加一个新的http 接口。执行下我们的需求:
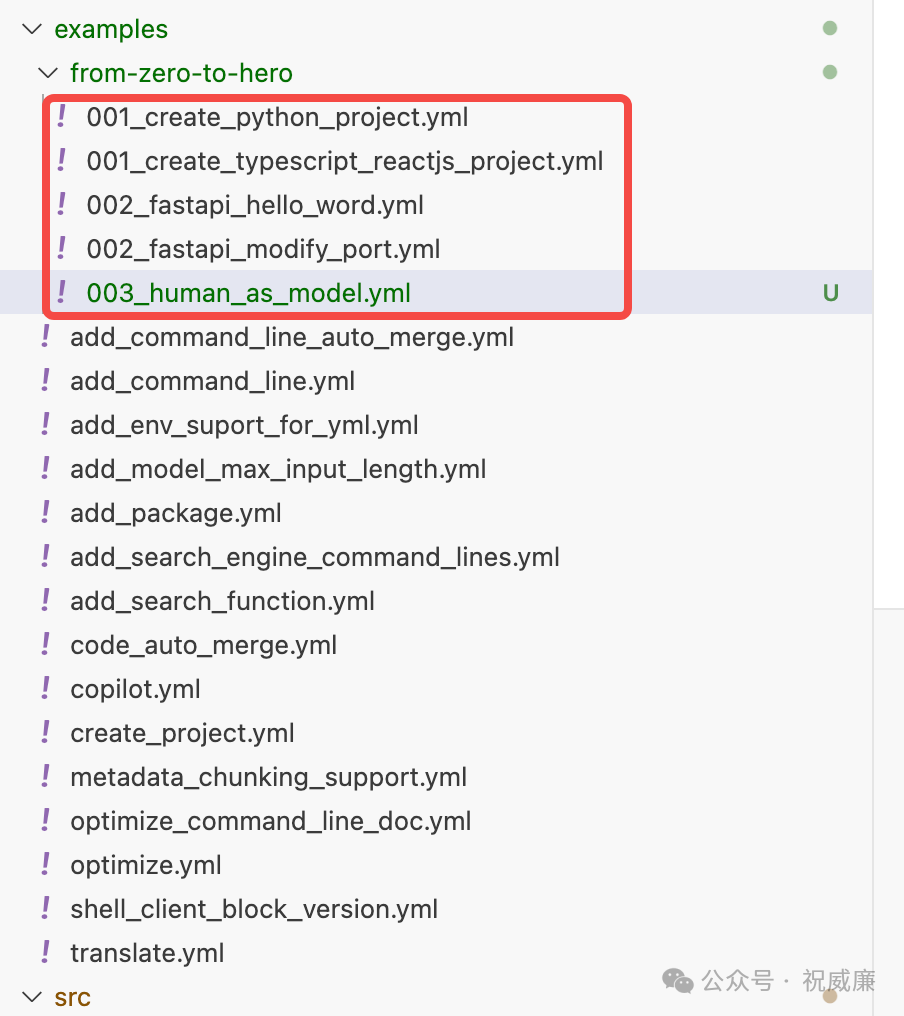
auto-coder --file ./examples/from-zero-to-hero/003_human_as_model.yml这个时候终端会自动进入交互模式:
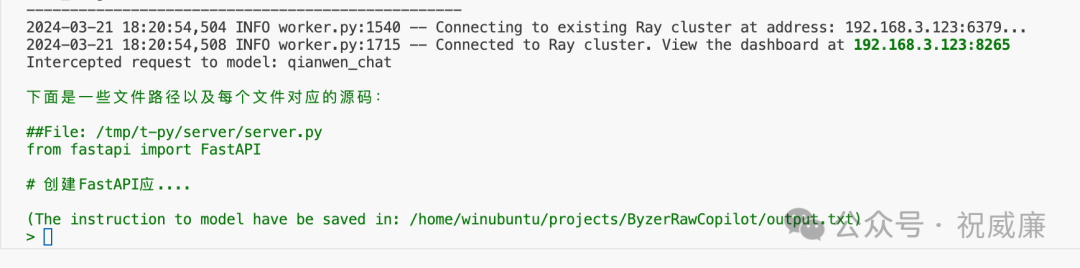
他提示你,他已经把问题保存到了 output.txt 文件里了,你来回答下这个问题。我这个时候把问题贴给 Claude:
Calude 生成了下面的代码:

现在我们复制下,注意要复制整个回复,而不是复制代码,复制完成后是这样子的:
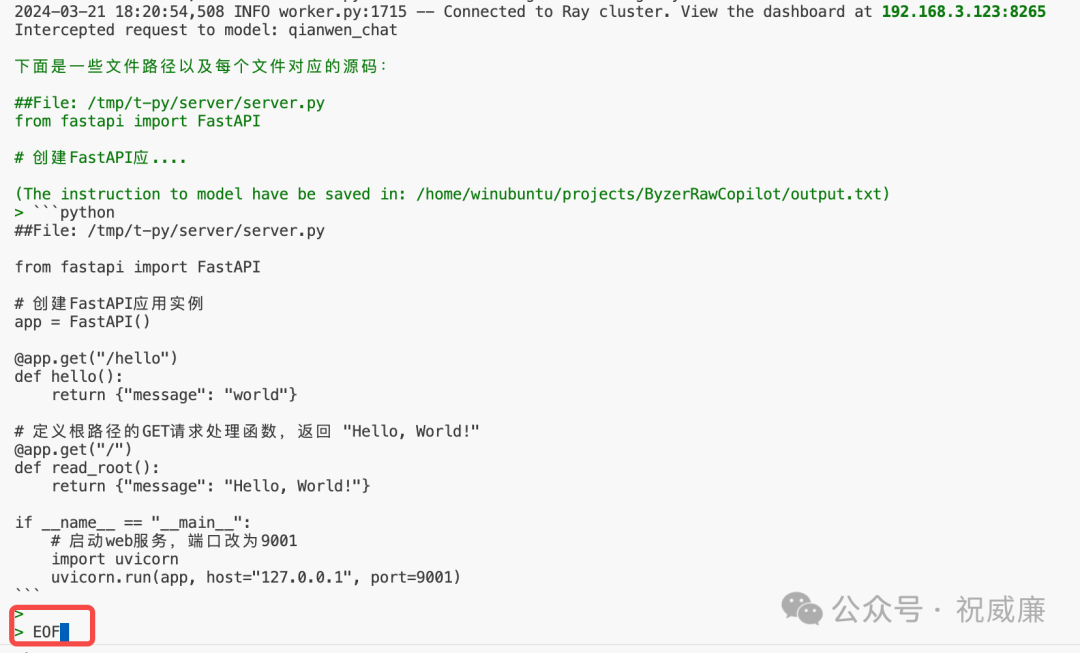
在最后EOF 表示你黏贴完了,再按回车。
这个时候你再打开 server.py 文件,内容已经更新了:

我们新增了一个新的接口。
当你的项目完成度越高,模型的生成能力也会越强,因为有更多的新,从而可以直接帮你完成业务代码的生成。
我们也可以看到,单次需求不要太大,否则会导致结果不可控。未来开发代码,会是这么一个流程:
每个需求都是一段文本,每个人都看得懂。做了多少变更,每个变更是什么,基本上都文本化了,对于产品,或者研发而言都是很大的利好。
同时配合 Git 的版本管理,保证AutoCoder的安全性,通过 Test 测试集,保证 AutoCoder的正确性。
下期,我们来介绍下,如何引入文档和搜索引擎,让AutoCoder 在阅读你已经写好的代码同时,再参考文档和自己去做搜索,来完成最终需求的代码编写。

















 825
825

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









