



 本文详细介绍了如何在Xcode项目中创建并配置预编译头文件(.pch)。通过七个步骤,从创建PCH文件到验证其是否正确加入项目,再到解释PCH文件的作用与优点,为读者提供了全面的指导。
本文详细介绍了如何在Xcode项目中创建并配置预编译头文件(.pch)。通过七个步骤,从创建PCH文件到验证其是否正确加入项目,再到解释PCH文件的作用与优点,为读者提供了全面的指导。
1.首先打开你的项目(演示使用一个空的项目),按照以下步骤即可
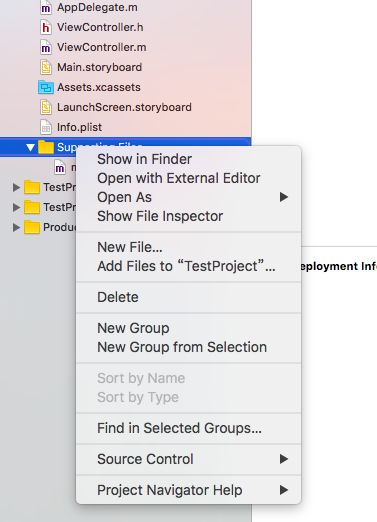
找到“Supporting Files”文件夹,右键即可看到下图,选择“New File...”
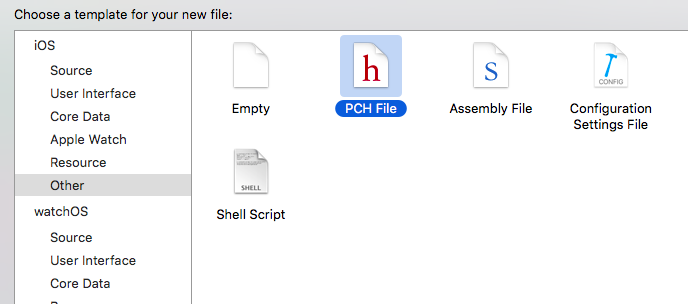
2.选择"iOS" -->> “Other” -->> “PCH File”,点击右下角的“Next”按钮,进入下一步。
3.在“Save As:”后面的输入框里输入文件名,注意此处文件名后缀要使用“.pch”,然后“enter”,进入下一步。

4.此时会看到在“Supporting Files”文件夹下增加了“Test.pch”文件。
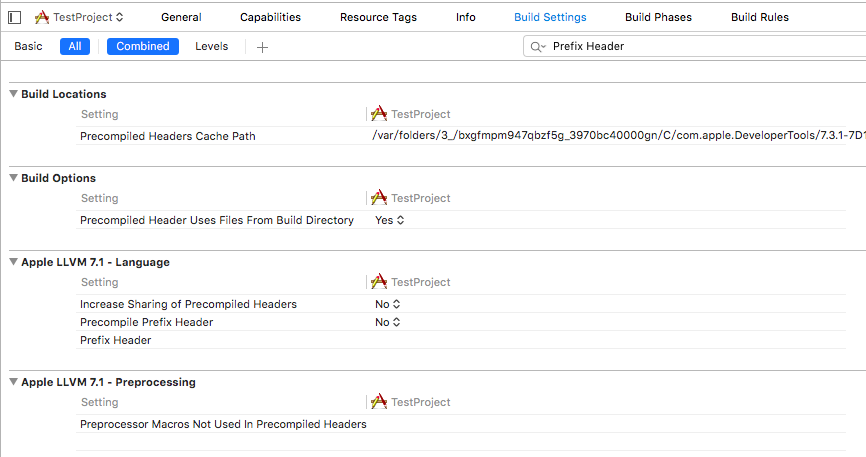
5.选择你的项目文件“TestProject”,在右边会看到下图的视图,选择“Build Settings”

第一次点击进去后可能会看不到全部的选项,在“Build Settings”视图的左上角找到“All”,点击,就可以看到所有了;
然后在同行右边的搜索框中,输入“Prefix Header”,会看到下图,此时,你会在“Apple LLVM 7.1 - Language”下看到“Prefix Header”行;
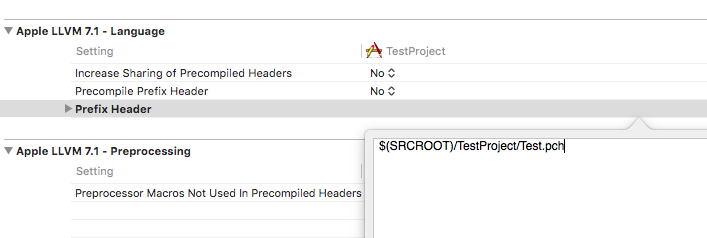
6.双击“Prefix Header”右侧的空白处,即可看到下图,在弹出框中输入“$(SRCROOT)/TestProject/Test.pch”,然后“enter”即可。
PS:这里解释一下“$(SRCROOT)”的意思,它代表的是工程的根目录,即相对路径,使用这一相对路径的好处就是,即使项目被移动位置,也不需要重新配置“Prefix Header”这一路径;如果不适用相对路径,而是使用绝对路径的话,一旦项目路径更改,编译时就会报错,错误信息是:“'.../Test.pch' file not found”。
7.接下来可以验证一下,是否成功加入.pch文件
在Test.pch 文件中,添加下面的代码
#import "ViewController.h"
然后打开AppDelegate.m文件,添加下面的代码,注意:此时不需要再在AppDelegate.h或AppDelegate.m文件中添加“ViewController.h"头文件引用。
self.window = [[UIWindow alloc] initWithFrame:[UIScreen mainScreen].bounds];
self.window.backgroundColor = [UIColor whiteColor];
[self.window makeKeyAndVisible];
ViewController *viewController = [ViewController new];
UINavigationController *nav = [[UINavigationController alloc] initWithRootViewController:viewController];
self.window.rootViewController = nav;
完成。
下面简单介绍一下.pch文件是什么。
百度翻译“PCH”,解释为“预编译头文件;由编译器在建立工程时自动生成;其中存放有工程中已经编译的部分代码;在以后建立工程时不再重新编译这些代码”
全称:pre-Compile Header
其优缺点详见“Why isn't ProjectName-Prefix.pch created automatically in Xcode 6?”

















 566
566

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









