




写在前面的话
本系列专栏是结合赵世钰老师的《强化学习的数学原理》的知识梳理与总结。总结不是对书本内容简单的堆砌,一定要加入自己的思考。希望大家通过我的笔记学到知识,欢迎在评论区讨论补充。不仅让自己对知识进行巩固强化,也能让粉丝看懂,创建本专栏的目的就达到了。
目录
第一章 基本概念
这一章主要以网格世界(grid world)为例介绍基本概念,之后引出马尔可夫决策过程(Markov decision process,MDP)的框架,为后面的学习打下基础。
世界网格例子
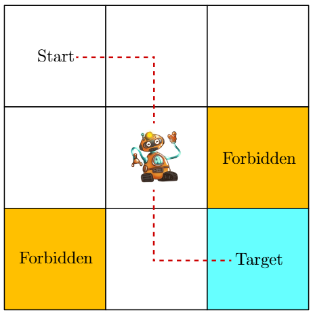
如下图所示,智能体(agent)通过在网格中移动,需要避开禁区(黄色单元格),进入目标区域(蓝色单元格),我们设定规则如下:
- 每个时刻智能体只能占据一个单元格且只能上下左右或不动。
- 允许智能体进入禁区,但会受到惩罚。
- 若智能体试图越过网格世界的边界,则智能体在下一时刻会被弹回到原来的状态。
状态和动作
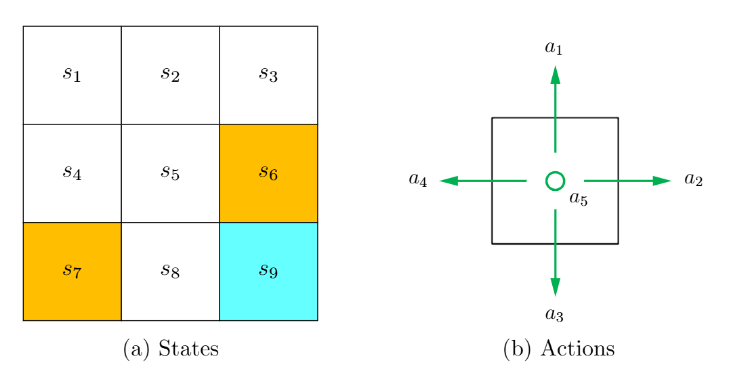
状态(state)用来描述智能体与环境的相对状况,网格世界中的9个单元格对应9的状态,用表示。所有状态的集合称为状态空间(state space)用
表示,如图(a)。
动作(action)用来表示智能体在每一个状态的可选动作,即向上、向右、向下、向左,用表示。这些动作的集合称为动作空间(stata space)用
表示,如图(b)。
你可能会问:比如智能体在状态时,是不是可以设置
状态的动作空间为
呢?答案是可以的,不过本书中只考虑最一般的情况,即
。我们并不人为避开其中不合理的动作,而是要通过算法学习来判断。
状态转移
智能体可能从一个状态转移到另一个状态,这样的过程称为状态转移(state transition),比如智能体在状态并且执行动作
(即向右移动),那么智能体会在下个时刻移动到状态
,这样的过程表示为
.
特别的,基于上面的规则,智能体“撞墙”和穿过禁区是允许的,即
,
成立。
状态转移的过程可以用表格来描述,每行对应一个状态,每列对应一个动作,每个单元格给出了智能体会转移到的下一个状态。
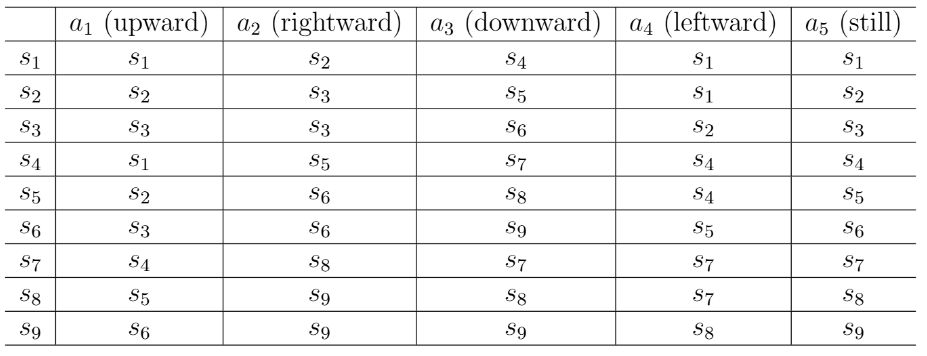
虽然直观,但是表格只能描述确定性的(deterministic)状态转移过程。当然,状态转移也可以是随机的(stochastic),此时需要条件概率来描述。数学上,在确定情况下用条件概率描述刚才的例子:
,
,
,
,
该条件概率告诉我们:当在状态采取动作
时,智能体转移到状态
的概率是1,而其他任意状态的概率为0。
随机的情况:假如网格世界中有随机的阵风吹过,这时候在状态
采取动作
时,智能体很有可能被阵风吹到
而不是
。在这种情况下,则有
,即下一个状态具有不确定性。不过简单起见,在本书网格世界的例子中,我们只考虑确定性的状态转移过程。
策略
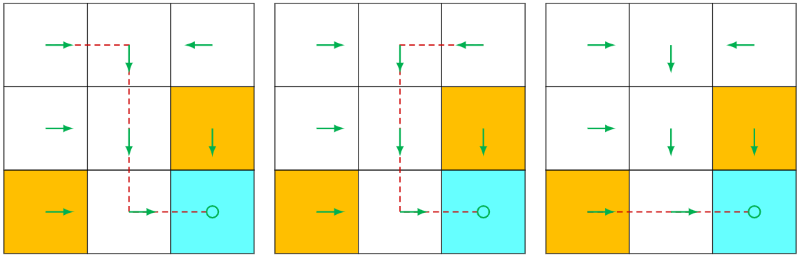
策略(policy)会告诉智能体在每一个状态应该采取什么样的动作。策略可以通过箭头来描述,若智能体执行某一策略,那么它会从初始状态生成一条轨迹,如下图。
表示在状态
采取动作
的概率(注意这里的
不是圆周率!)
结合上面状态转移的概念,我们可以得出:若确定的策略生成的轨迹,其中一段是,则
,在状态
采取其他动作的概率均为0。
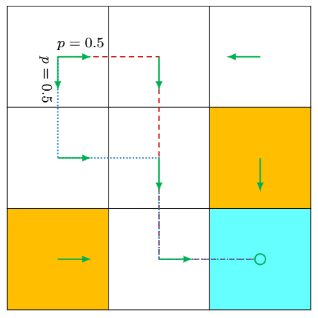
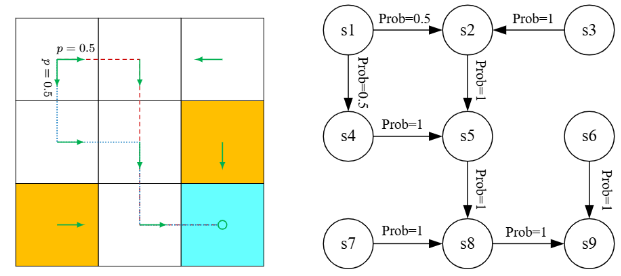
策略也可能是随机性的。如下图,在状态,智能体有0.5的概率采取向右的动作,有0.5的概念采取向下的动作。此时则有
,
.
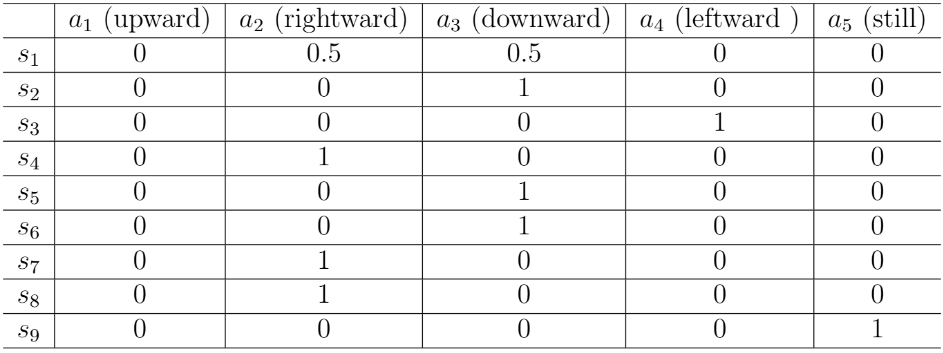
当然策略也可以用表格来描述。这样的描述方法被称为表格表示法(tabular representation)。
奖励
奖励(reward)的设定简单来说就是我们对智能体执行的动作进行评分。当智能体执行一个的动作后会获得奖励。
是一个实数,它是状态
和动作
的函数,即
。奖励
为正代表我们鼓励该动作,奖励为负则代表我们不鼓励该动作。
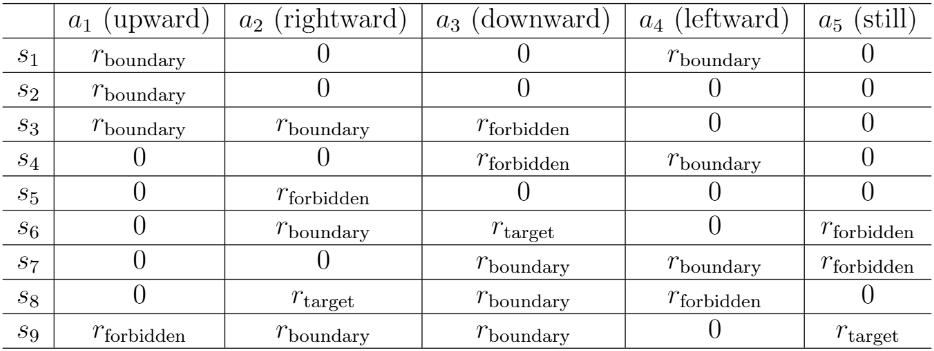
在本章网格世界的例子中,我们设置无效(撞墙)和违规(穿过禁区)动作获得奖励为负,到达目的地获得奖励
为正,其余动作获得奖励
为0,即
,
,
,
,
同样的,奖励的过程可以用表格和条件概率描述。
注意:这些奖励只是即时奖励(immediate reward),即在采取一个动作后可以立刻获得的奖励。一个好的策略必须考虑更长远的总奖励(total reward)。具有最大的即时奖励的动作不一定能带来最大的总奖励。
表格只能描述确定性的奖励过程,然而条件概率可以描述更加一般化的奖励过程:表示在状态
采取动作
得到奖励
的概率。在前面的例子,对状态
,有
,
,
如果奖励过程是随机的,例如,
表示各有0.5的概率获得-1或者-2的奖励。本书的网格世界的例子都只考虑确定的奖励过程。
轨迹、回报、回合
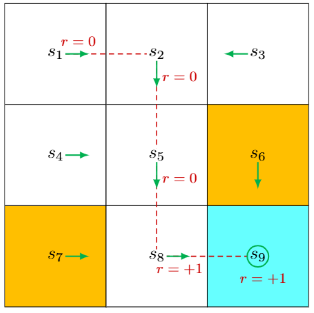
轨迹(trajectory)指的是一个“状态-动作-奖励”的链条。如图()所示的策略,智能体从出发会得到如下轨迹:
.
回报(return)是指沿着一条轨迹智能体获得一系列的即时奖励之和,可以用于评价一个策略的好坏。回报也可以称为总奖励(total reward)或累积奖励(cumulative reward)。上述轨迹对应回报为
.
回报由即时奖励(immediate reward)和未来奖励(future reward)组成。即时奖励前面说过不再赘述。未来奖励是指智能体离开初始状态后获得的奖励之和。上述轨迹对应的即时奖励是0,未来奖励是1,总奖励则是1.
当智能体到达目标状态之后,它也许会持续执行策略,进而持续获得奖励。若智能体在
采取动作
(保持不动),此时会继续获得奖励
,也就是说如果它学会了“刷分”,计算回报得到的是
,
由于计算出的回报会发散到无穷,所以我们需要引入折扣回报(discounted return)的概念。令为折扣因子(discount rate),折扣回报是指折扣奖励的总和,即为不同时刻得到的奖励添加相应的折扣再求和:
由此以来折扣回报就变成了一个等比数列:
.
我的个人理解:折扣回报就是当智能体离开初始状态之后每次的奖励都乘上
的
时刻次方,然后将其累加起来计算出的回报。
回合(episode)是指智能体在终止状态(terminal state)停止的过程。 需要与神经网络训练过程程中的回合(epoch)加以区分。
任务分为两类:
- 如果一个任务最多有有限步,那么这样的任务称为回合制任务(episodic tast)。
- 如果智能体与环境的交互永不停止,这种任务被称为持续性任务(continuing task)。
为了在数学上可以不加区分的对待这两种任务,我们可以把回合制任务转换为持续性任务。本书中,我们将目标状态视为一个普通状态,其动作空间为
。由于智能体到达这个状态之后仍然允许离开这个状态,因此这是一种更加一般化的情况,我们需要让智能体学习到在到达这状态之后能够保持原地不动。值得注意的是,我们需要使用折扣因子,来避免回报趋于无穷。
掌握上述概念后,理解马尔可夫决策过程(Markov decision process,MDP)就变得容易多了。
马尔可夫决策过程
马尔可夫决策过程(Markov decision process,MDP)是描述随机动态是系统的一般框架。整个强化学习需要基于这个框架。关键要素包括集合、模型、策略还有马尔可夫性质。
我个人总结为三个集合+两个模型+一个策略+马尔可夫性质,有了前面的铺垫理解起来就不那么难了。
三个集合:
- 状态空间:所有状态的集合,记为
。
- 动作空间:与每个状态
相关联的所有动作的集合,记为
。
- 奖励集合:与
相关联的所有奖励的集合,记为
。
两个模型
- 状态转移概率:在状态
采取动作
时,智能体转移到
的概率为
。对于任意
。
- 奖励概率:在状态
的概率是
。对于任意
成立。
一个策略
- 在状态
。对应任意
。
马尔可夫性质
- 马尔可夫性质(Markov property)是指随机过程中的无记忆性质,它数学上表示为
,
,
- 其中
表示下一时刻。上述式子表示下一个状态和奖励仅依赖于当前时刻的状态和动作,而与之前时刻的状态和动作无关。
一旦在马尔可夫决策过程中的决策确定下来,马尔可夫决策过程就退化成一个马尔可夫过程(Markov process,MP)。本书主要考虑有限的马尔可夫决策过程,即状态和动作的数量都是有限的。下图中的网格世界策略已经给定,此时整个系统可以被抽象为一个马尔可夫过程。
总结
我们在学习了状态、动作、奖励、回报、策略等基本概念,后面再理解马尔可夫决策过程就不是那么困难了,再次感谢这本书的作者赵世钰老师。后面我们将继续学习状态值(state value)以及贝尔曼方程(Bellman equation),之后我会把我学习RL的过程写进一个专栏,大家持续的关注我吧!
制作不易,对您有帮助的话就点赞收藏支持一下,感谢感谢~



















 1592
1592

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











