 STM32定时器详解
STM32定时器详解





 本文深入解析STM32的定时器种类,包括高级、通用和基本定时器的特性,如位数、计数模式、DMA请求、捕获/比较通道及特殊功能。重点介绍通用定时器的功能特点,如向上、向下、中心对齐计数模式,预分频器,通道功能,外部信号控制,事件中断/DMA,以及PWM和输入捕获的工作原理。
本文深入解析STM32的定时器种类,包括高级、通用和基本定时器的特性,如位数、计数模式、DMA请求、捕获/比较通道及特殊功能。重点介绍通用定时器的功能特点,如向上、向下、中心对齐计数模式,预分频器,通道功能,外部信号控制,事件中断/DMA,以及PWM和输入捕获的工作原理。
- 通用定时器
三种STM32定时器区别
|
定时器种类 |
位数 |
计数器模式 |
产生DMA请求 |
捕获/比较通道 |
互补输出 |
特殊应用场景 |
|
高级定时器 (TIM1,TIM8) |
16 |
向上,向下,向上/下 |
可以 |
4 |
有 |
带可编程死区的互补输出 |
|
通用定时器(TIM2,TIM5) |
32 |
向上,向下,向上/下 |
可以 |
4 |
无 |
通用。定时计数,PWM输出,输入捕获,输出比较 |
|
通用定时器(TIM3,TIM4) |
16 |
向上,向下,向上/下 |
可以 |
4 |
无 |
通用。定时计数,PWM输出,输入捕获,输出比较 |
|
通用定时器(TIM9~TIM14) |
16 |
向上 |
没有 |
2 |
无 |
通用。定时计数,PWM输出,输入捕获,输出比较 |
|
基本定时器 (TIM6,TIM7) |
16 |
向上,向下,向上/下 |
可以 |
0 |
无 |
主要应用于驱动DAC |
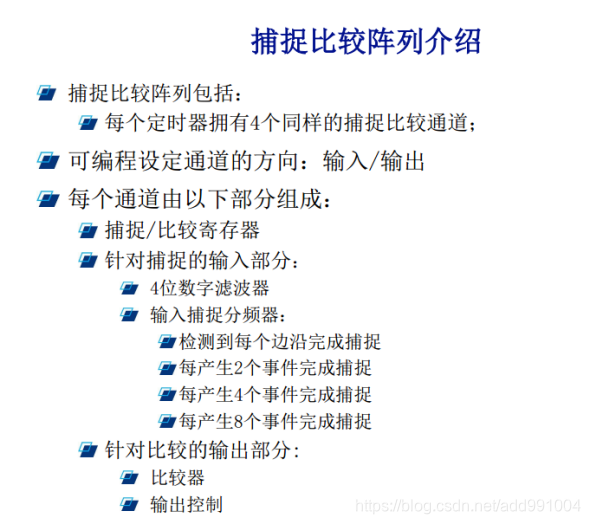
通用定时器功能特点描述:
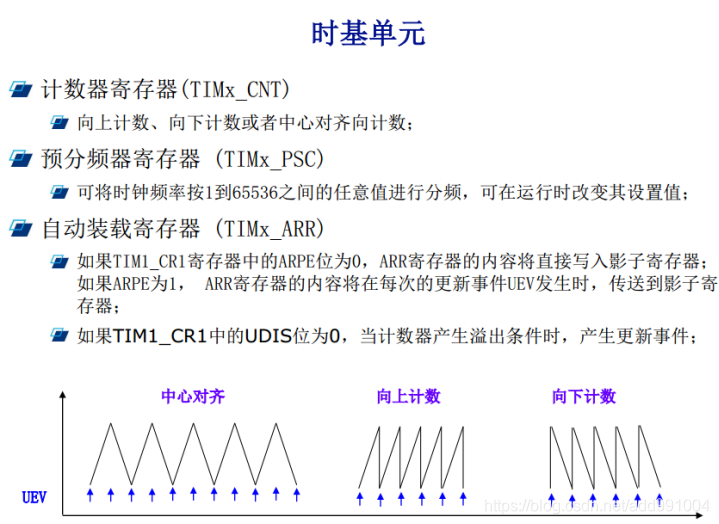
1.16 /32 位向上、向下、向上/向下(中心对齐)计数模式,自动装载计数器(TIMx_CNT)。
2.16 位可编程(可以实时修改)预分频器(TIMx_PSC),计数器时钟频率的分频系数 为 1~65535 之间的任意数值。
3.4 个独立通道(TIMx_CH1~4),这些通道可以用来作为:
(1)输入捕获
(2)输出比较
(3)PWM 生成(边缘或中间对齐模式)
(4)单脉冲模式输出
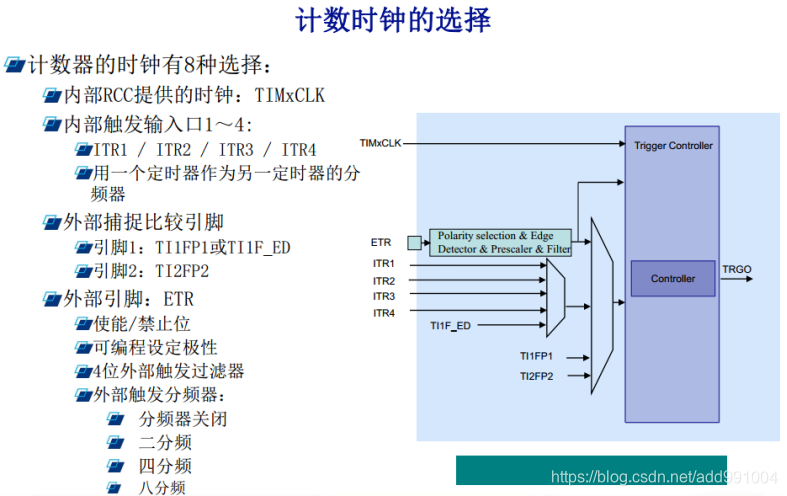
4.可使用外部信号(TIMx_ETR)控制定时器和定时器互连(可以用 1 个定时器控制另外一个定时器)的同步电路。
5.如下事件发生时产生中断/DMA(6个独立的IRQ/DMA请求生成器):
(1)更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
(2)触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
(3)输入捕获
(4)输出比较
(5)支持针对定位的增量(正交)编码器和霍尔传感器电路
(6)触发输入作为外部时钟或者按周期的电流管理
6.STM32 的通用定时器可以被用于:测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和 PWM)等。
7.使用定时器预分频器和 RCC 时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。STM32 的每个通用定时器都是完全独立的,没有互相共享的任何资源。
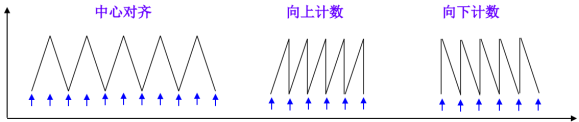
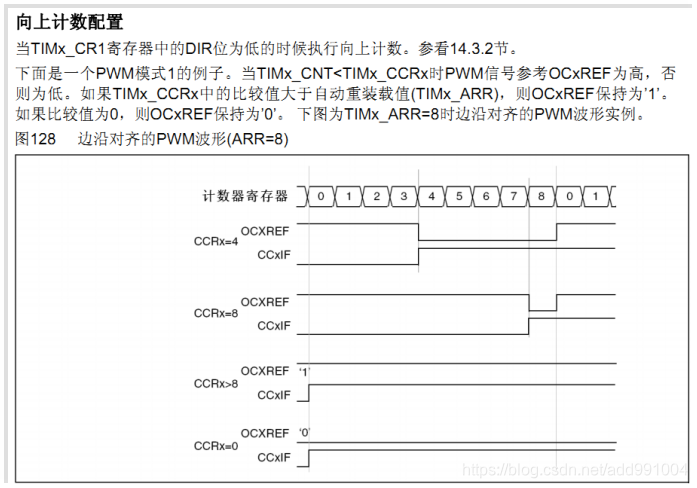
计数器模式:(通用定时器可以向上计数、向下计数、向上向下双向计数模式)
①向上计数模式:计数器从0计数到自动加载值(TIMx_ARR),然后重新从0开始计数并且产生一个计数器溢出事件。
②向下计数模式:计数器从自动装入的值(TIMx_ARR)开始向下计数到0,然后从自动装入的值重新开始,并产生一个计数器向下溢出事件。
③中央对齐模式(向上/向下计数):计数器从0开始计数到自动装入的值-1,产生一个计数器溢出事件,然后向下计数到1并且产生一个计数器溢出事件;然后再从0开始重新计数。
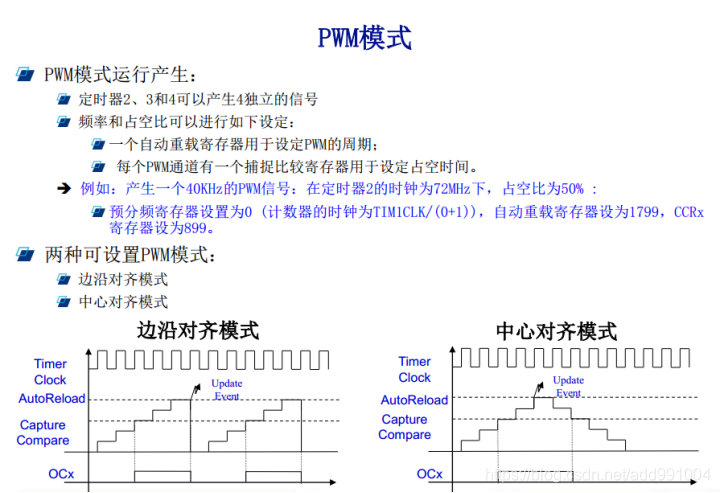
- PWM工作
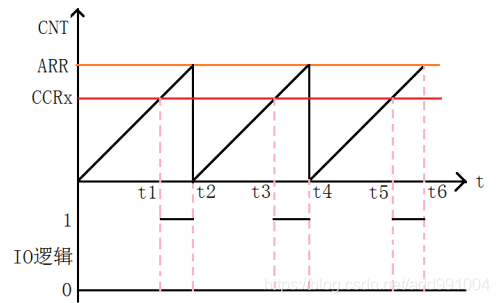
STM32 PWM工作过程(通道1为例):
CCR1:捕获比较(值)寄存器(x=1,2,3,4):设置比较值。
CCMR1: OC1M[2:0]位,对于PWM方式下,用于设置PWM模式1【110】或者PWM模式2【111】
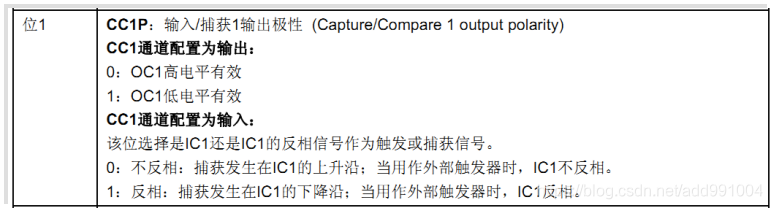
CCER:CC1P位:输入/捕获1输出极性。0:高电平有效,1:低电平有效。
CCER:CC1E位:输入/捕获1输出使能。0:关闭,1:打开。
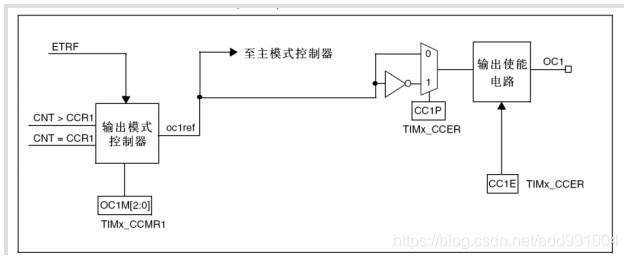
工作过程:
PWM输出库函数:
void TIM_OCxInit(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
typedef struct
{
uint16_t TIM_OCMode; //PWM模式1或者模式2
uint16_t TIM_OutputState; //输出使能 OR失能
uint16_t TIM_OutputNState;
uint16_t TIM_Pulse; //比较值,写CCRx
uint16_t TIM_OCPolarity; //比较输出极性
uint16_t TIM_OCNPolarity;
uint16_t TIM_OCIdleState;
uint16_t TIM_OCNIdleState;
} TIM_OCInitTypeDef;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //PWM模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure. TIM_Pulse=100;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
PWM输出配置步骤:
1.使能定时器14和相关IO口时钟。
使能定时器14时钟:RCC_APB1PeriphClockCmd();
使能GPIOF时钟:RCC_AHB1PeriphClockCmd ();
2.初始化IO口为复用功能输出。
函数:GPIO_Init();
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
3.GPIOF9复用映射到定时器14
GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14);
4.初始化定时器:ARR,PSC等:TIM_TimeBaseInit();
5.初始化输出比较参数:TIM_OC1Init();
6.使能预装载寄存器: TIM_OC1PreloadConfig(TIM14, TIM_OCPreload_Enable);
7.使能自动重装载的预装载寄存器允许位TIM_ARRPreloadConfig(TIM14,ENABLE);
8.使能定时器。
9.不断改变比较值CCRx,达到不同的占空比效果:TIM_SetCompare1();
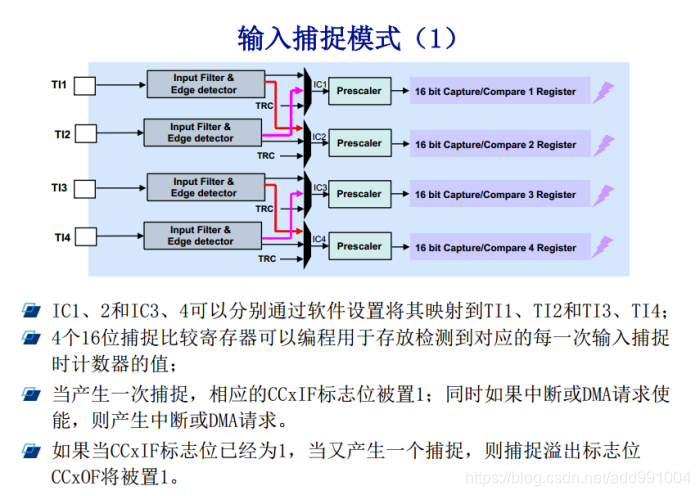
- 输入捕获
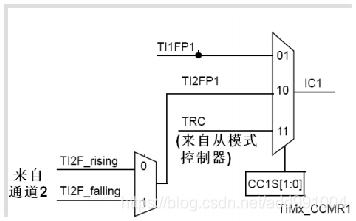
STM32 输入捕获工作过程(通道1为例):
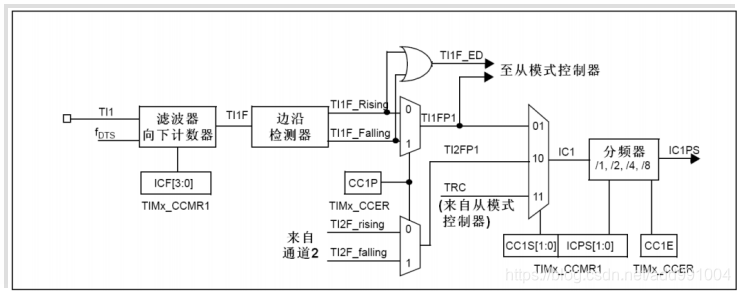
总结工作过程:
通过检测TIMx_CHx上的边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定时器的值(TIMx_CNT)存放到对应的捕获/比较寄存器(TIMx_CCRx)里面,完成一次捕获。
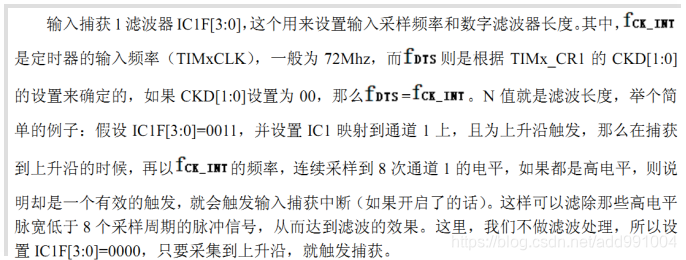
步骤1:设置输入捕获滤波器(通道1为例)
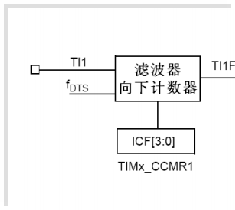
步骤2:设置输入捕获极性(通道1为例)
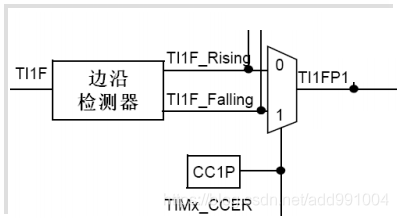
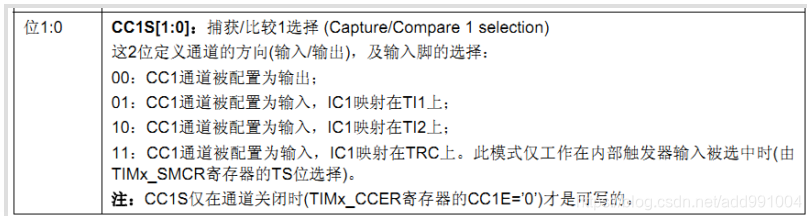
步骤3:设置输入捕获映射通道(通道1为例)
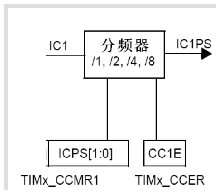
步骤4:设置输入捕获分频器(通道1为例)
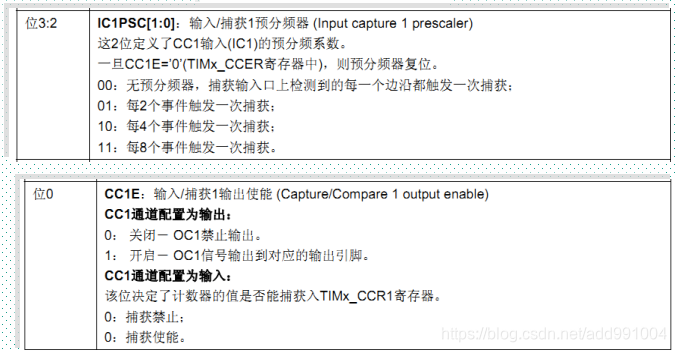
步骤5:捕获到有效信号可以开启中断
输入捕获的一般配置步骤:
① 初始化定时器和通道对应IO的时钟。
② 初始化IO口,模式为复用:
GPIO_Init();
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
③设置引脚复用映射:
GPIO_PinAFConfig();
④初始化定时器ARR,PSC
TIM_TimeBaseInit();
⑤初始化输入捕获通道
TIM_ICInit();
⑥如果要开启捕获中断,
TIM_ITConfig();
NVIC_Init();
⑦使能定时器:
TIM_Cmd();
⑧编写中断服务函数:
TIMx_IRQHandler();

















 2789
2789

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









