



液化气瓶由于历史遗留性问题,安全问题频发,一再危及人生及财产安全,气瓶安全问题治理已然成为国家安全防范工作中的重中之中,为此各相关部门已经采取相关措施对气瓶进行监管。
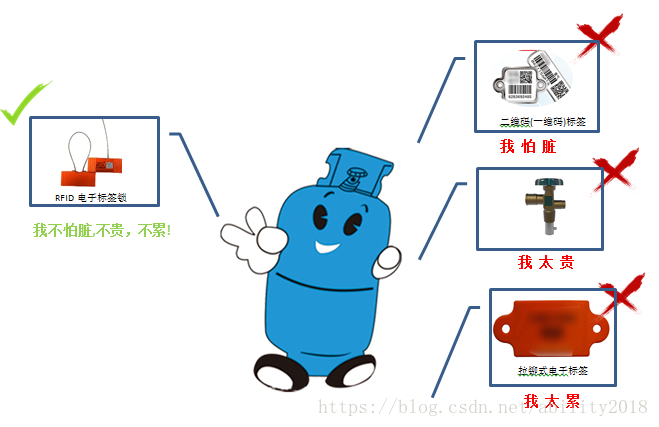
据统计液化气瓶的监管方式主要分为三种:二维码(一维码)标签、智能角阀、RFID电子标签,我们来分析一下这三种监管方式到底谁的实用性强,谁又在做“表面文章”。
二维码(一维码)标签
二维码因其方便快捷的特点已广泛运用在各行各业中,为此,气瓶监管方面也采用“风头正劲”的二维码(一维码)标签。但据气站实际使用后反馈了解到二维码(一维码)标签在使用过程中出现如下问题:无法识读、重码、仿造等,无法识读是因为气瓶长年处在油烟密布的厨房,二维码表面被油污所覆盖;重码和仿造是因为二维码采用图像识别,可复制,不具备唯一性。
安装方式,二维码(一维码)标签都采用铆钉枪等专业工具为气瓶加钉标签,其耗费的时间及人力也是不可估算。
智能角阀
智能角阀是通过在角阀上加装智能芯片与阀芯,配合智能充装枪使用,可以实现防拆、防充、芯片识别功能,但是它的成本极高,占气瓶的费用的三分之一,在气瓶数量数百万的情况下,总体费用是气瓶数量的50倍,高达数万千。
安装方式,需要专业机构专业工具耗时耗力,无疑增加了政府和老百姓的经济负担。
RFID电子标签
RFID技术,又称无线射频识别,其自身具有不可复制性、抗污能力强、安全防爆、通用性强等特点,完全解决了气瓶特殊的应用环境。
安装方式,一个为金属胶或拉铆安装,在安装是同样需要专业的安装工具;另一种为锁扣方式,阿贝力特“挂在钢瓶上的电子标签”将RFID芯片嵌入到标签内,通过一拉一锁的方式将标签锁在每个安全气瓶的阀门下,10秒之内即可完成安装。
以上是气瓶监管的几种形式,谁的可用性强通过分析也是一目了然,望相关部门“引优弃劣”。
液化气瓶监管技术如何做到正确选型
最新推荐文章于 2025-04-22 01:00:00 发布
 本文对比分析了液化气瓶监管中的三种技术:二维码(一维码)标签、智能角阀与RFID电子标签。二维码易受污染且缺乏唯一性,智能角阀成本高昂,而RFID电子标签以其不可复制性、强抗污能力和高效安装方式脱颖而出。
本文对比分析了液化气瓶监管中的三种技术:二维码(一维码)标签、智能角阀与RFID电子标签。二维码易受污染且缺乏唯一性,智能角阀成本高昂,而RFID电子标签以其不可复制性、强抗污能力和高效安装方式脱颖而出。

















 435
435

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









