



上次的文章中描述了 DailyTick 的设计理念。经过两周左右的设计和开发,现在 DailyTick 的主要 UI 已经完成了原型的设计和初步的实现。既然是原型,当然看起来就有点粗糙。
主 UI
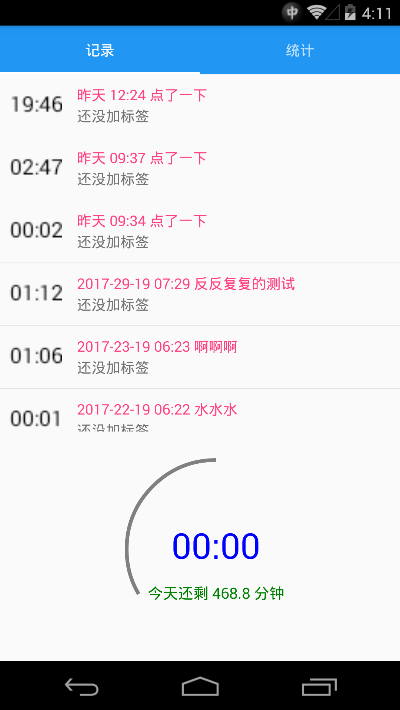
主 UI 是使用一个 TabbedView 实现的。一个用来记录,一个用来统计。当然,最终的完成版应该至少有 3 个 Tab,因为还需要有一个“设置”的 Tab。现在因为我还没想到有什么需要设置的,暂时没有写。在“记录”这个 tab 里,有两个组件:一个
ListView 和一个 NControl 写成的圆形按钮。使用的时候,只需要点一下下面那个圆形按钮,就可以形成一条记录。当然,为了防止误点,我这里设置了一个限制,就是两次点击之间需要大于 1 分钟。这带来一个麻烦就是:你不能记录小于 1 分钟的事件。比如你想看看自己每天做时间记录的过程消耗了多长时间,这个暂时办不到。
上面这个列表,其实我还是有点担心的:如果这个软件可以被使用 10 年(应该不太可能,因为那个时候,应该会有比手机更好用的设备),按照我现在记录的情况来看,一天大概有 30 条左右的记录,一年是 365 * 30 = 10950 条,10 年就是 10 万条,如果每天记录得细点,可能就有几十万条,那会不会崩呢?虽然可以使用 Cell 的重用机制,不过也还是有点担心。当然,比起
ListView 的性能问题,我更担心的是内存够不够用。因为左边那个时间显示,并不是一个 Label。因为我的 UI 设计水平太差,所以我使用了
ListView 内置的 ImageCell,左边那个是一个图片。这个图片是在内存里绘制出来,再使用
ImageSource.FromStream 载入的。所以不知道会不会消耗太多的内存。这里可能是一个可以优化的点。
对事件/活动的修改
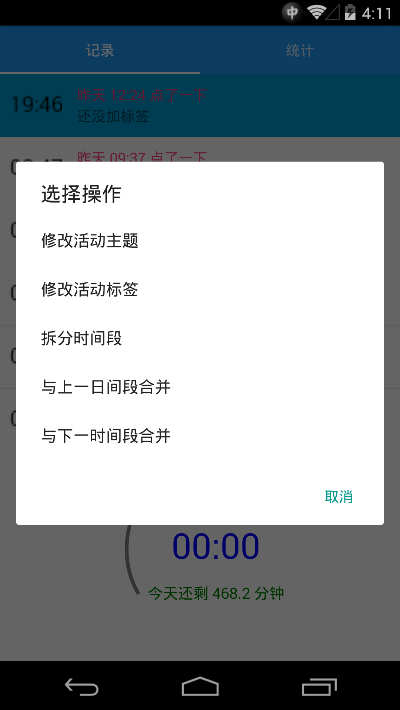
在记录完一个活动/事件之后,需要记录做了什么事情,也就是一个事件/活动的主题,还需要给一个事件添加标签,以便之后做统计。本来我想的是,使用 ListView 的
Context Menu 来实现的,但这东西有个问题,就是和 TabbedView 的左右滑动有冲突,所以怎么也不能显示
Context Menu。我只好放弃这个方案,使用了 DisplayActionSheet。结果,在 Android 上,就成了这个样子。不是很美观。当然,做为原型,也就先这样好了。
虽然这里写了5个操作,但我现在只实现了 1.5 个。这个 1 就是:
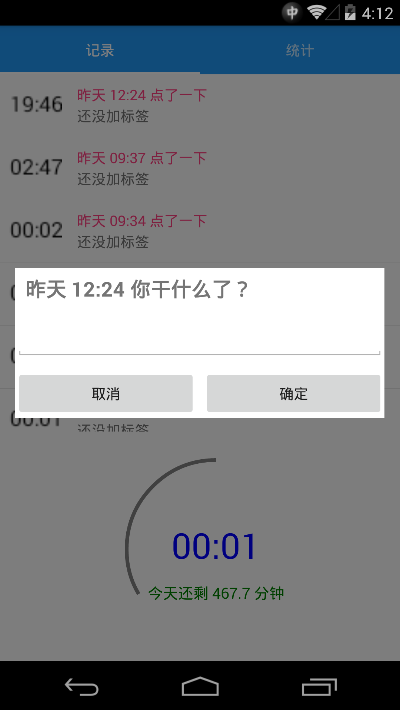
好吧,我知道这个也有点丑(这也叫有点……)。功能很简单,就是一个文本的编辑,然后再更新回原来的列表里。另外的 0.5 个,是编辑 tag 的 page,这个只是完成了一个样子,但我感觉并不是很好用,可能在后面还会再改。

按照我现在的设想,DailyTick 不会有其它时间记录软件那种编辑一个事件的开始时间、结束时间的功能,我提供的是把一个时间段进行拆分,或者把两个时间段合并。这样保证了一天的时间线是完整的,不存在“无记录时间”这个东西。因为按照我对这个软件的设计哲学,人是无法控制时间的,不管你怎么使用自己的时间,时间本身都会不受控制的流走。所以,我们能做的,只是记录自己在某一段时间里做了什么。这里可能有一个问题,需要在未来解决一下,就是在什么地方体现我一天的日程安排,也就是 TODO 要记录在哪儿的问题。
这里,时间段拆分是有一个 UI 的,我写了一个草稿,但没有放上来。对于合并操作,可能只有确认的提示,不会有单独的 UI。
统计 UI
统计页里,只有一个 WebView,当然是一个定制的 WebView,因为我需要在 C# 和 JS 之间传数据。这个
HybridWebView 的基础实现已经实现出来了,不过要怎么传递数据,还没有想法。按照现在的初步设想,应该会使用 highchart.js 和 jQuery 来完成统计页的实现(并没有什么复杂交互,不想上 MVVM 的东西了)。主要就是报表和饼图了。虽然我觉得饼图其实意义有限,直接一个 table 可以搞定很多工作,但如果这个工具被扩散到非理科出身的人那里(只是幻想一下),那么统计图就变成必不可少的东西了。
当然,这一切都还只是原型,如果你有什么对 UI 或者 UE 上的看法,欢迎在下面留言,一起讨论。也欢迎 star & fork 我的项目:https://github.com/holmescn/DailyTick

















 1012
1012

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









