



 本文提供了一个详细的ROS入门教程,通过安装ROS Kinetic并运行经典的乌龟机器人示例来帮助新手快速上手。文章指导如何在Ubuntu 16.04上设置环境,并逐步演示如何启动和控制乌龟移动。
本文提供了一个详细的ROS入门教程,通过安装ROS Kinetic并运行经典的乌龟机器人示例来帮助新手快速上手。文章指导如何在Ubuntu 16.04上设置环境,并逐步演示如何启动和控制乌龟移动。
- ROS官网
- ROS的kinetic安装
手把手式教程,小伙伴们大可放心,慢慢来
下面运行一个课堂上的例子:
环境:ubuntu16.04 & ROS-Ubuntu2
ROS初体验——乌龟爬爬爬
输入以下命令启动节点:
roscore
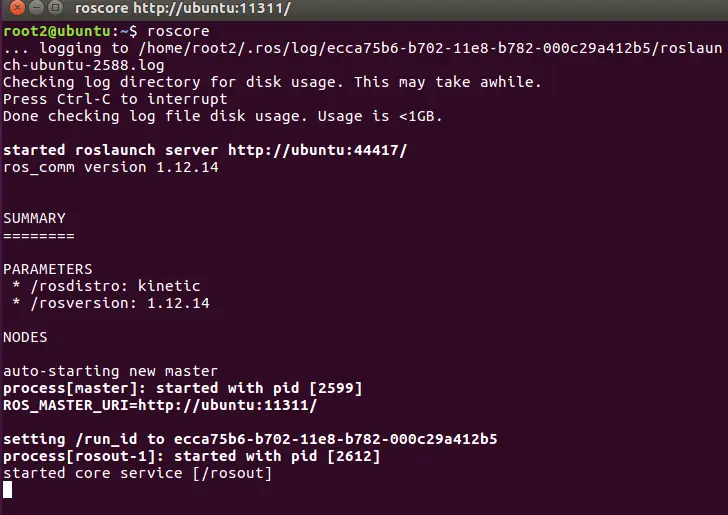
出现最后一行的started core service 即成功运行。
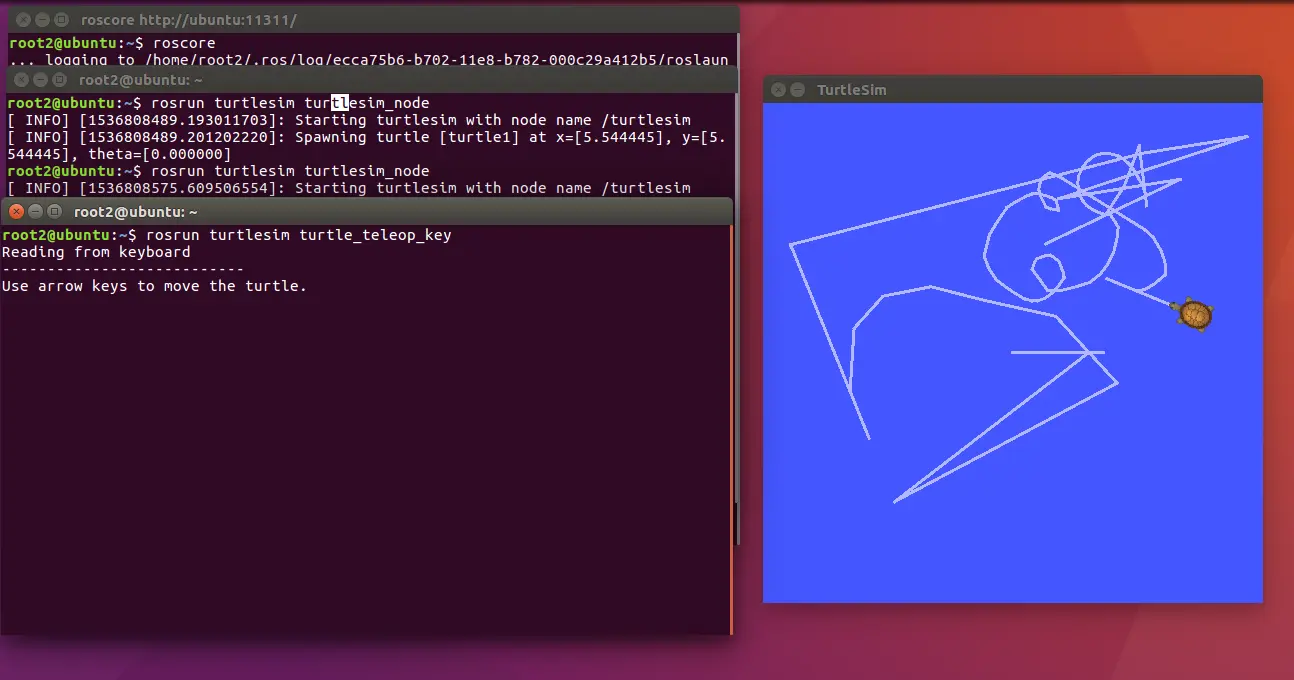
输入以下命令生成小乌龟:
rosrun turtlesim turtlesim_node
输入以下命令可以使用键盘上的箭头按键控制乌龟移动:
rosrun turtlesim turtle_teleop_key
注意两点:
1.以上三条命令需要分别依次打开三个终端窗口进行输入执行;
2.需要将光标焦点停留在最后一个(即第三个)终端窗口上才可调动乌龟;
运行结果如图:
还有可能遇到下面这个报错:
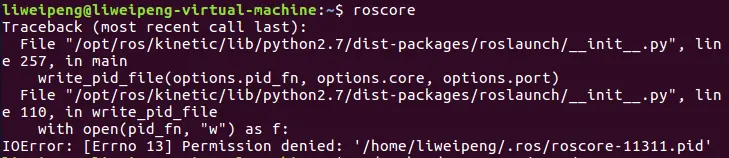
解决方案:http://www.cnblogs.com/fuhang/p/9689815.html
即输入下面代码,再次运行roscore解决:
sudo chmod 777 -R ~/.ros/


















 1785
1785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











