




 REMOTE TCP功能使得机器人能稳定地执行如涂胶、打磨等任务,通过固定在地面的TCP进行作业,简化了工具校准,减轻机器人负重。使用REMOTE TCP的特点包括容易示教、减少示教点及保持运动轨迹一致性。然而,它不适用于关节运动和腕关节运动,也不能与Line Tracking等功能结合使用。设置过程与用户坐标系相似,通过RTCP指令启用。
REMOTE TCP功能使得机器人能稳定地执行如涂胶、打磨等任务,通过固定在地面的TCP进行作业,简化了工具校准,减轻机器人负重。使用REMOTE TCP的特点包括容易示教、减少示教点及保持运动轨迹一致性。然而,它不适用于关节运动和腕关节运动,也不能与Line Tracking等功能结合使用。设置过程与用户坐标系相似,通过RTCP指令启用。
REMOTE TCP功能即远程TCP功能,TCP功能,使用此功能可使机器人手臂夹持工件至固定在地上的TCP(如胶枪、打磨机等)处进行相关作业(如涂胶、打磨等),并保持运动的稳定性和轨迹的恒定性。
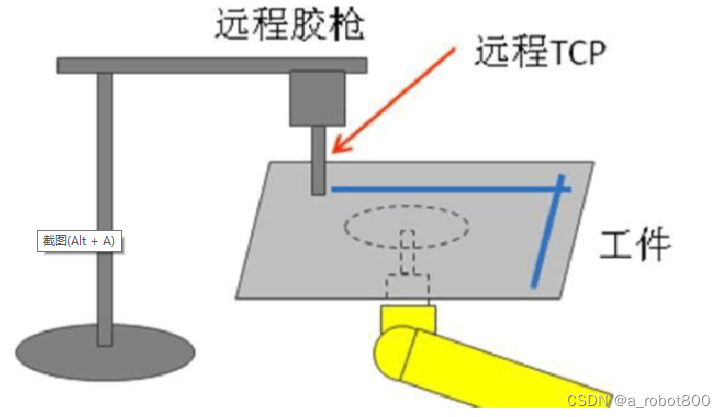
使用 REMOTE TCP,有以下特点:
由于TCP相对于地面是固定的,因此工具的校准更容易;
机器人无需携带很重的工具;
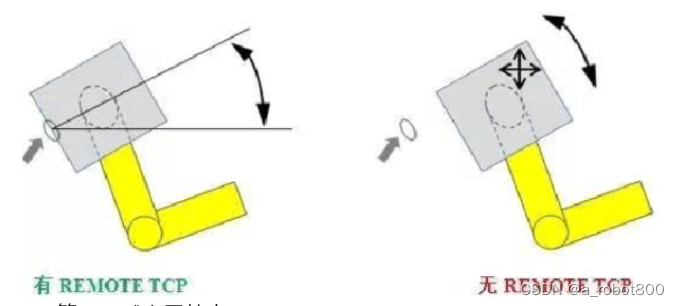
即使不使用 REMOTE TCP功能,仍可以通过移动机器人夹持的工件来进行相关作业。但如果旋转工件,工具不能做相应的动作。
有无 REMOTE TCP,最直观的体现在旋转工件方面,如示意图所示:

随着工件位置的变化造成的旋转中心的改变,机器人不能绕着旋
转中心旋转
机器人可以绕着使用 REMOTE TCP示教出来的点旋转
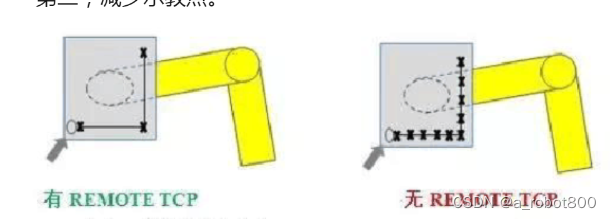
第一,能轻易地进行示教操作。
第二,减少示教点;
 </
</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章






















 到【灌水乐园】发言
到【灌水乐园】发言







