




- 四元数记法:
一个四元数包含一个标量分量和一个3D向量分量。记标量为w,记向量为v或分开的x,y,z。如下:
[w,v]
[w,(x,y,z)]
- 四元数与复数:
四元数扩展了复数系统 ,它使用三个虚部i,j,k。它们的关系如下:
i2=j2=k2=ijk=−1;ij=k,ji=−k;ij=k,ji=−k;jk=i,kj=−i;ki=j,ik=−j; i^2=j^2=k^2=ijk=-1; ij=k,ji=-k ; ij=k,ji=-k; jk=i,kj=-i; ki=j,ik=-j;i2=j2=k2=ijk=−1;ij=k,ji=−k;ij=k,ji=−k;jk=i,kj=−i;ki=j,ik=−j;
一个四元数[w,(x,y,z)]定义了复数 w+xi+yj+zk。
-
四元数和轴-角对:
四元数能被解释为角位移的轴-角对方式。其公式为下:
设向量n为旋转轴,θ为绕轴旋转的量
q=[cos(θ/2)sin(θ/2)n]=[cos(θ/2)(sin(θ/2)nxsin(θ/2)nysin(θ/2)nz)] q=[cos(θ/2) sin(θ/2)n] =[cos(θ/2) (sin(θ/2)nx sin(θ/2)ny sin(θ/2)nz)] q=[cos(θ/2)sin(θ/2)n]=[cos(θ/2)(sin(θ/2)nxsin(θ/2)nysin(θ/2)nz)] -
负四元数:
−q=[−w(−x−y−z)]=[−w−v] -q=[-w (-x -y -z)]=[-w -v] −q=[−w(−x−y−z)]=[−w−v]q和-q代表的实际角位移是相同的,很奇怪吧!如果我们将θ加上360度的倍数,不会改变q代表的角位移,但它使q的四个分量变负了。因此,3D中的任意角位移都有两种不同的四元数表示方式,它们互相为负。 -
单位四元数:
几何上存在2个单位四元数:[1,0]和[-1,0]。它们的意义是:当旋转角为360度的整数倍时,方位并没有改变,并且旋转轴也是无关紧要的。
数学上只有一个单位四元数:[1,0]。任意四元数q乘以单位四元数[1,0]仍为q。 -
四元数的模:
公式如下:
∣∣q∣∣=∣∣[w(xyz)]∣∣=sqrt(w2+x2+y2+z2) =∣∣[wv]∣∣=sqrt(w2+∣∣v∣∣2) ||q||=||[w (x y z)]||=sqrt(w2+x2+y2+z2) =||[w v]||=sqrt(w^2+||v||^2) ∣∣q∣∣=∣∣[w(xyz)]∣∣=sqrt(w2+x2+y2+z2) =∣∣[wv]∣∣=sqrt(w2+∣∣v∣∣2)
几何意义:
∣∣q∣∣=sqrt(cos(θ/2)2+sin(θ/2)2∣∣n∣∣2) ||q||=sqrt(cos(θ/2)^2+sin(θ/2)^2||n||^2) ∣∣q∣∣=sqrt(cos(θ/2)2+sin(θ/2)2∣∣n∣∣2)
若n为单位向量,则:||q||=1
- 四元数共轭:
q∗=[w−v]=[w(−x−y−z)] q*=[w -v]=[w (-x -y -z)] q∗=[w−v]=[w(−x−y−z)] - 四元数的逆:
q−1=q∗/∣∣q∣∣ q-1=q*/||q||q−1=q∗/∣∣q∣∣
但我们只使用单位四元数,故q−1=q∗q^{-1}=q*q−1=q∗
几何解释:使向量v反向,则旋转方向也反向了。因此q绕轴旋转θ角,而q*沿相反的方向旋转相同的角度。
- 四元数乘法(叉乘):
[w1v1][w2v2]=[w1w2−v1v2w1v2+w2v1+v2×v1] [w_1 \quad v_1][w_2 \quad v_2]=[w_1w_2-v_1v_2 \quad w_1v_2+w_2v_1+v_2×v_1] [w1v1][w2v2]=[w1w2−v1v2w1v2+w2v1+v2×v1]
四元数叉乘满足结合律但不满足交换律:
(ab)c=a(bc) (ab)c=a(bc)(ab)c=a(bc)
ab!=baab!=baab!=ba
四元数乘积的模等于模的乘积:
∣∣q1q2∣∣=∣∣q1∣∣∣∣q2∣∣ ||q_1q_2||=||q_1|| ||q_2|| ∣∣q1q2∣∣=∣∣q1∣∣∣∣q2∣∣
四元数乘积的逆等于各个四元数的逆以相反的顺序相乘:
(ab)−1=b−1a−1 (ab)^{-1}=b^{-1}a^{-1} (ab)−1=b−1a−1
如何用四元数将3D点绕轴旋转:
让我们“扩展”一个标准3D点(x,y,z)到四元数空间,通过定义四元数p=[0, (x,y,z)]即可。设q为我们讨论的旋转四元数形式[cos(θ/2) sin(θ/2)n],n为旋转轴,单位向量,θ为旋转角。你会惊奇地发现,执行下面乘法可使3D点p绕n旋转:
p′=qpq−1 p'=qpq^{-1}p′=qpq−1
四元数乘法的优势在哪?对点p先执行a旋转再执行b旋转:
p′=b(apa−1)b−1=(ba)p(a−1b−1)=(ba)p(ba)−1 p'=b(apa^{-1})b^{-1}=(ba)p(a^{-1}b^{-1})=(ba)p(ba)^{-1} p′=b(apa−1)b−1=(ba)p(a−1b−1)=(ba)p(ba)−1
注意,先进行a旋转再进行b旋转等价于执行乘积ba代表的单一旋转。因此,四元数乘法可用来连接多次旋转,这和矩阵乘法效果一样。
四元数的“差”:
定义:从一个方位到另一个方位的角位移。
如给定方位a和方位b,求a到b的角位移d。用四元数表示为:ad=b=>d=a−1bad=b => d=a^{-1}bad=b=>d=a−1b
- 四元数点乘:
q1⋅q2=[w1v1]⋅[w2v2]=w1w2+v1⋅v2 q1·q2=[w1 v1]·[w2 v2]=w1w2+v1·v2 q1⋅q2=[w1v1]⋅[w2v2]=w1w2+v1⋅v2
几何解释:类似于向量点乘的几何解释,两四元数点乘绝对值越大,其代表的角位移越相似。 - 四元数的对数:
首先,令α=θ/2,||n||=1,则q=[cosα nsinα]=[cosα xsinα ysinα zsinα],公式如下:
logq=log[cosαnsinα]=[0αn] log q=log[cosα \quad nsinα]=[0 \quad αn] logq=log[cosαnsinα]=[0αn]
注意log q的结果,它一般不是单位四元数。
- 四元数的指数:
设四元数p的形式为[0, αn],n为单位向量:
p=[0αn]=[0(αxαyαz)] p=[0 \quad αn]=[0 \quad (αx \quad αy \quad αz)] p=[0αn]=[0(αxαyαz)]||n||=1
公式如下:
expp=exp([0αn])=[cosαnsinα] exp\quad p=exp([0 \quad αn])=[cosα \quad nsinα] expp=exp([0αn])=[cosαnsinα]
根据定义,exp p问题返回单位四元数。
四元数指数运算为四元数对数运算的逆运算:
exp(log q)=q
-四元数与标量相乘:
kq=k[w v]=[kw kv]
=k[w (x y z)]=[kw kx ky kz]
- 四元数求冥:
qt=exp(tlogq) q^t=exp(tlog \quad q) qt=exp(tlogq)
几何意义:对数运算log q提取了轴n和角度θ;接着和指数t进行标量乘时,结果是θ乘以t;最后,指数运算“撤消”了对数运算,以tθ和n重新计算w和v。
求四元数冥的代码如下:
1 /// <summary>
2 /// 四元数求冥
3 /// </summary>
4 /// <param name="e">指数</param>
5 /// <param name="w,x,y,z">四元数输入,输出</param>
6 static void Calc(float e, ref float w, ref float x, ref float y, ref float z)
7 {
8 // 检查单位四元数的情况,避免除零
9 if (Mathf.Abs(w) < 0.9999f)
10 {
11 // 提取半角(θ/2)
12 float alpha = Mathf.Acos(w);
13 // 计算新的alpha值
14 float newAlpha = alpha * e;
15 // 计算数的w值
16 w = Mathf.Cos(newAlpha);
17 float multi = Mathf.Sin(newAlpha) / Mathf.Sin(alpha);
18 // 计算新的xyz值
19 x *= multi;
20 y *= multi;
21 z *= multi;
22 }
23 }
- 四元数插值——“slerp”:
当今3D数学中四元数存在的理由是由于一种称作slerp的运算,即球面线性插值(Spherical Linear Interpolation)。slerp运算非常有用,因为它可以在两个四元数之间平常插值。slerp插值避免了欧拉角插值的所有问题(如万向锁)。
求法一:
设开始与结束的四元数为q0,q1,插值变量设为t,t在[0, 1]之间变化 。则slerp函数定义为: slerp(q0,q1,t)
计算此函数的思路如下:
△a=a1−a0 △a=a_1-a_0△a=a1−a0
lerp(a0,a1,t)=a0+t△a lerp(a_0,a_1,t)=a_0+t△a lerp(a0,a1,t)=a0+t△a
四元数中,
- 计算差值:q0△q=q1=>△q=q0−1q1 q0△q=q_1 => △q=q0^{-1}q_1q0△q=q1=>△q=q0−1q1
- 取插值的一部分,应用求冥的办法,即(△q)t
- 初始值加上插值的一部分,应用四元数乘法。
综上,公式如下:
slerp(q0,q1,t)=q0(q0−1q1)tslerp(q0,q1,t)=q_0(q_0^{-1}q1)^tslerp(q0,q1,t)=q0(q0−1q1)t
这是理论上的公式,实践中,将使用更有效的一种办法
求法二:
slerp的基本思想是沿着4D球面上连接两个四元数的弧插值。
可以把这种思想表现在平面上,如向量v0,v1都是单位向量,w是之间的夹角,t在[0,1]区间,求vt:
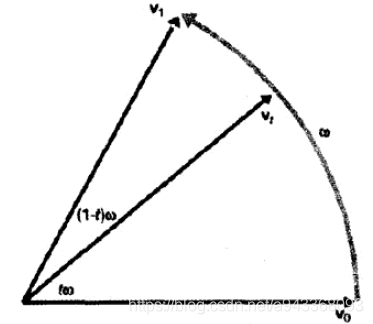
求得:vt=(sin(1-t)w/sinw)v0+(sintw/sinw)v1
将同样的思想扩展到四元数上,重写slerp可得:
slerp(q0,q1,t)=(sin(1−t)w/sinw)q0+(sintw/sinw)q1 slerp(q_0,q_1,t)=(sin(1-t)w/sinw)q_0+(sintw/sinw)q_1slerp(q0,q1,t)=(sin(1−t)w/sinw)q0+(sintw/sinw)q1
可以用点乘来计算两个四元数间的“角度”。
这里有2点需要考虑:第一,四元数q和-q代表相同的方位,但它们作为slerp参数时可能导致不一样的结果,这是因为4D球面不是欧氏空间的直接扩展。而这种现象在2D和3D中不会发生。解决方法是选择q0和q1的符号使得点乘q0·q1的结果是非负。第二个要考虑的是如果q0和q1非常接近,sinθ会非常小,这时除法可能会出现问题。为了避免这样的问题,当sinθ非常小时使用简单的线性插值。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









