#include <boost/interprocess/detail/config_begin.hpp>
#include <boost/interprocess/sync/interprocess_mutex.hpp>
#include <boost/interprocess/sync/interprocess_condition.hpp>
struct trace_queue
{
enum { LineSize = 100 };
trace_queue()
: message_in(false)
{}
//Mutex to protect access to the queue
boost::interprocess::interprocess_mutex mutex;
//Condition to wait when the queue is empty
boost::interprocess::interprocess_condition cond_empty;
//Condition to wait when the queue is full
boost::interprocess::interprocess_condition cond_full;
//Items to fill
char items[LineSize];
//Is there any message
bool message_in;
};
#include <boost/interprocess/detail/config_end.hpp>
3. 进程A的函数,"ProcessA.cpp"
#include"stdafx.h"
#include <boost/interprocess/shared_memory_object.hpp>
#include <boost/interprocess/mapped_region.hpp>
#include <boost/interprocess/sync/scoped_lock.hpp>
#include<boost\thread\thread.hpp>
#include<boost\date_time\posix_time\posix_time.hpp>
#include <iostream>
#include <cstdio>
#include "Condition_shared_data.hpp"
using namespace boost::interprocess;
int main()
{
//Erase previous shared memory and schedule erasure on exit
struct shm_remove
{
shm_remove() { shared_memory_object::remove("MySharedMemory"); }
~shm_remove() { shared_memory_object::remove("MySharedMemory"); }
} remover;
//<-
(void)remover;
//->
//Create a shared memory object.
shared_memory_object shm
(create_only //only create
, "MySharedMemory" //name
, read_write //read-write mode
);
try {
//Set size
shm.truncate(sizeof(trace_queue));
//Map the whole shared memory in this process
mapped_region region
(shm //What to map
, read_write //Map it as read-write
);
//Get the address of the mapped region
void * addr = region.get_address();
//Construct the shared structure in memory
trace_queue * data = new (addr) trace_queue;
const int NumMsg = 100;
for (int i = 0; i < NumMsg; ++i) {
scoped_lock<interprocess_mutex> lock(data->mutex);
if (data->message_in) {
data->cond_full.wait(lock);
}
if (i == (NumMsg - 1))
{
std::sprintf(data->items, "%s", "last message");
std::cout << "last message:" << i << std::endl;
}
else
{
std::sprintf(data->items, "%s_%d", "my_trace", i);
std::cout << "My trace:" << i << std::endl;
boost::this_thread::sleep(boost::posix_time::milliseconds(100));
}
//Notify to the other process that there is a message
data->cond_empty.notify_one();
//Mark message buffer as full
data->message_in = true;
}
}
catch (interprocess_exception &ex) {
std::cout << ex.what() << std::endl;
return 1;
}
getchar();
return 0;
}
3. 进程B的函数,"ProcessB.cpp"
#include"stdafx.h"
#include <boost/interprocess/shared_memory_object.hpp>
#include <boost/interprocess/mapped_region.hpp>
#include <boost/interprocess/sync/scoped_lock.hpp>
#include <iostream>
#include <cstring>
#include "Condition_shared_data.hpp"
using namespace boost::interprocess;
int main()
{
//Create a shared memory object.
shared_memory_object shm
(open_only //only create
, "MySharedMemory" //name
, read_write //read-write mode
);
try
{
//Map the whole shared memory in this process
mapped_region region
(shm //What to map
, read_write //Map it as read-write
);
//Get the address of the mapped region
void * addr = region.get_address();
//Obtain a pointer to the shared structure
trace_queue * data = static_cast<trace_queue*>(addr);
//Print messages until the other process marks the end
bool end_loop = false;
do {
scoped_lock<interprocess_mutex> lock(data->mutex);
if (!data->message_in)
{
data->cond_empty.wait(lock);
}
if (std::strcmp(data->items, "last message") == 0)
{
end_loop = true;
std::cout << "last message !" << std::endl;
}
else
{
//Print the message
std::cout << "Receive the message:"<<data->items << std::endl;
//Notify the other process that the buffer is empty
data->message_in = false;
data->cond_full.notify_one();
}
} while (!end_loop);
}
catch (interprocess_exception &ex) {
std::cout << ex.what() << std::endl;
return 1;
}
getchar();
return 0;
}










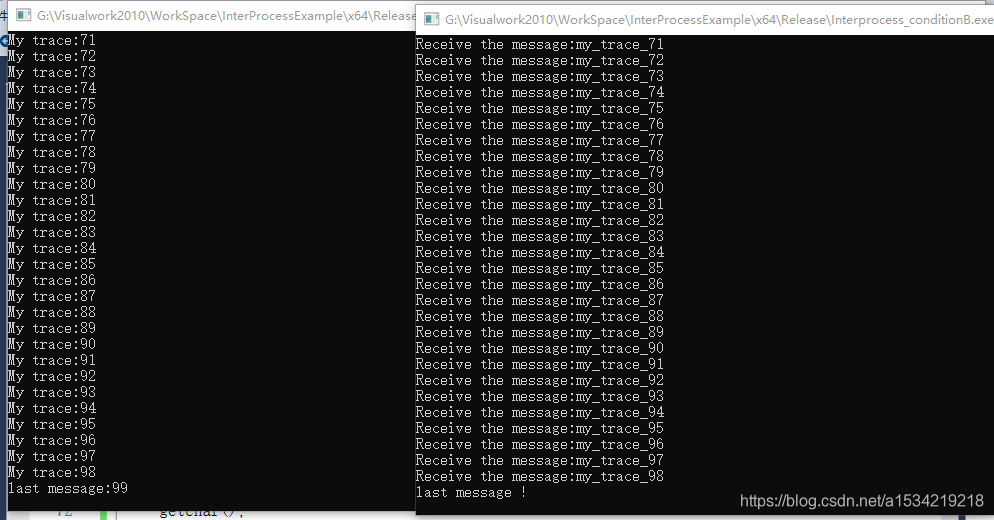
 本文介绍使用Boost库实现的进程间通信实例,通过共享内存和条件变量进行消息传递。ProcessA写入消息到共享队列,ProcessB读取消息,演示了多进程间的同步和通信机制。
本文介绍使用Boost库实现的进程间通信实例,通过共享内存和条件变量进行消息传递。ProcessA写入消息到共享队列,ProcessB读取消息,演示了多进程间的同步和通信机制。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









