







 本文详细介绍了Unity3D中Transform组件的各种用法,包括如何实现物体的平移、旋转及查找子物体等操作,并深入探讨了局部坐标与世界坐标的关系。
本文详细介绍了Unity3D中Transform组件的各种用法,包括如何实现物体的平移、旋转及查找子物体等操作,并深入探讨了局部坐标与世界坐标的关系。
rotate 自转 放在父类下可实现绕点转
============================================
与高中数学颠倒
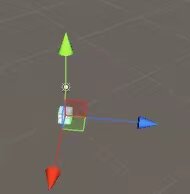
x为右,y为上,z为前
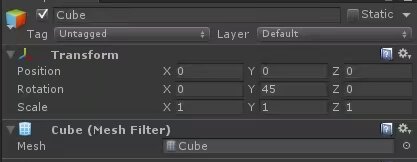
此显示为局部坐标,x,y,z的移动是以父类的rotation大小为基轴
当没有父类的时候,以世界基轴为坐标,局部坐标就是世界坐标,
即 旋转自身坐标对自身不生效,对子类生效
======
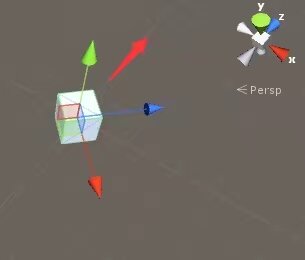
此处显示的是旋转角度,对移动自己的local x,y,z 是依然以父类为基轴,子类才能生效
=====
transform.forward 蓝色向量,在世界坐标的表示,即以世界坐标的roatation为基轴表示
比如说有一个X物体,你要获取相对于它的前方矢量就是
var x_direction :Vector3 = X.transform.TransformDirection(Vector.forward);
获取以X物体为轴 vector的前方 在世界坐标的向量
即使旋转了45度但是当执行
transform.localPosition = Vector3.forward;
物体依然会以父类。即世界坐标的方向移动
========
此时如果像以物体本身的y轴移动即
transform.localPosition = transform.TransformDirection(Vector3.forward);
计算出以 transform 物体为轴的 前方向 在世界坐标 的 方向,然后直接赋值
此时计算出的坐标是以 世界坐标为方向,与物体 本身x y z移动的方向的 坐标 是一致
等价于transform.forward
======
总结:
transform.TransformDirection(Vector3.forward)
当前物体的面向方向 vector.forward 在世界坐标的表示,即物体蓝色向量的世界坐标,
而不是以其父类世界坐标的vector。forward,虽然物体的移动是以父类的坐标移动
===
transform.InverseTransformDirection(Vector3.forward)
世界坐标forward 转化为当前坐标轴,即以transform为坐标轴的 局部变量。即使transform本身已经旋转了一定角度
,此数值应该赋值给transform的子类,除非transform本身没有转向
rotatearound 围绕点转
lookat 自转 看着物体
Quaternion 看unity书
LookRotation
Slerp
transform Find (name)只能找子物体,不能找子子物体
transform Find (name/name/name)能找子子物体
GameObject.Find 可以找所有
GameObject.FindGameObjectsWithTag 可以找所有
GetComponentsInChildren 可以找所有子,再取gameobject
mountGo.transform.localPosition += Vector3.up * 10 * Time.deltaTime;
mountGo.transform.localPosition = new Vector3(mountGo.transform.localPosition.x, 10 * Time.deltaTime + transform.localPosition.y, mountGo.transform.localPosition.z);
mountGo.transform.Translate(0, Time.deltaTime * 10, 0);
============================================
与高中数学颠倒
x为右,y为上,z为前
此显示为局部坐标,x,y,z的移动是以父类的rotation大小为基轴
当没有父类的时候,以世界基轴为坐标,局部坐标就是世界坐标,
即 旋转自身坐标对自身不生效,对子类生效
======
此处显示的是旋转角度,对移动自己的local x,y,z 是依然以父类为基轴,子类才能生效
=====
transform.forward 蓝色向量,在世界坐标的表示,即以世界坐标的roatation为基轴表示
比如说有一个X物体,你要获取相对于它的前方矢量就是
var x_direction :Vector3 = X.transform.TransformDirection(Vector.forward);
获取以X物体为轴 vector的前方 在世界坐标的向量
即使旋转了45度但是当执行
transform.localPosition = Vector3.forward;
物体依然会以父类。即世界坐标的方向移动
========
此时如果像以物体本身的y轴移动即
transform.localPosition = transform.TransformDirection(Vector3.forward);
计算出以 transform 物体为轴的 前方向 在世界坐标 的 方向,然后直接赋值
此时计算出的坐标是以 世界坐标为方向,与物体 本身x y z移动的方向的 坐标 是一致
等价于transform.forward
======
总结:
transform.TransformDirection(Vector3.forward)
当前物体的面向方向 vector.forward 在世界坐标的表示,即物体蓝色向量的世界坐标,
而不是以其父类世界坐标的vector。forward,虽然物体的移动是以父类的坐标移动
===
transform.InverseTransformDirection(Vector3.forward)
世界坐标forward 转化为当前坐标轴,即以transform为坐标轴的 局部变量。即使transform本身已经旋转了一定角度
,此数值应该赋值给transform的子类,除非transform本身没有转向


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









