







 本文介绍了一个使用曼哈顿距离和贪心策略解决路径寻找问题的算法实现。通过计算不同点到目标点的距离,算法决定是否采用当前步骤,以达到最终目标或判断无法到达的情况。
本文介绍了一个使用曼哈顿距离和贪心策略解决路径寻找问题的算法实现。通过计算不同点到目标点的距离,算法决定是否采用当前步骤,以达到最终目标或判断无法到达的情况。
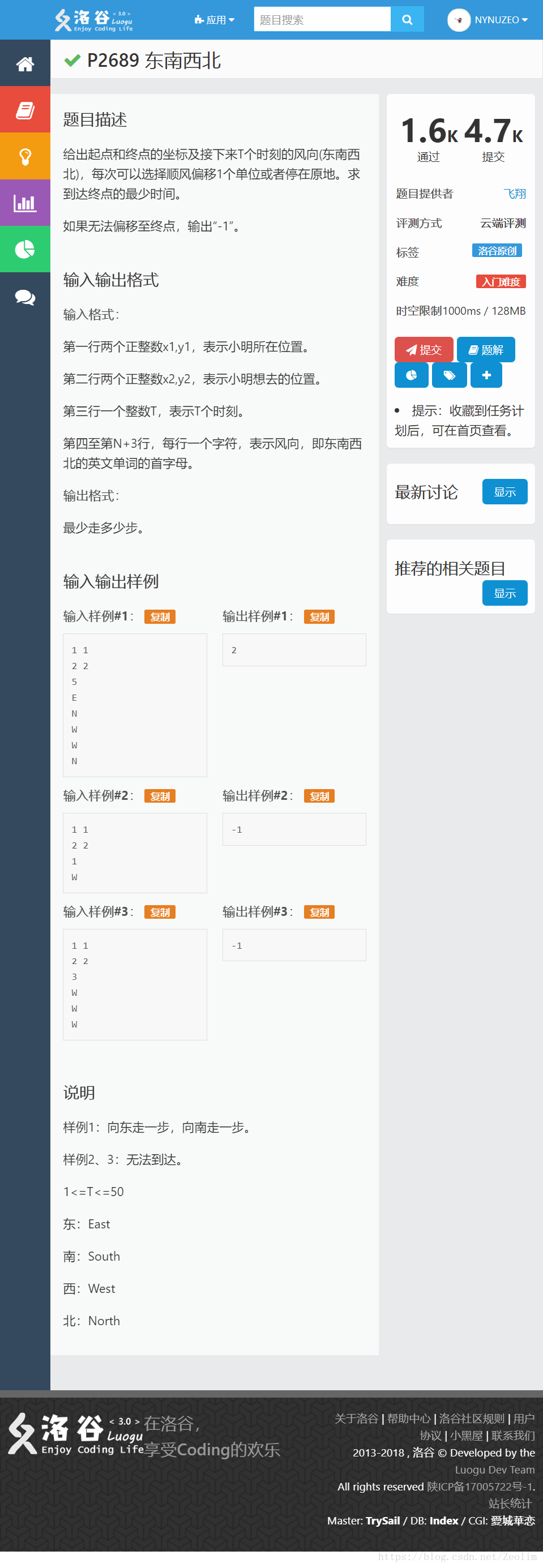
求个曼哈顿距离然后贪心
//#pragma GCC optimize(2)
#include <cstdio>
#include <iostream>
#include <cstdlib>
#include <cmath>
#include <cctype>
#include <string>
#include <cstring>
#include <algorithm>
#include <stack>
#include <queue>
#include <set>
#include <map>
#include <ctime>
#include <vector>
#include <fstream>
#include <list>
#include <iomanip>
#include <numeric>
using namespace std;
typedef long long ll;
const int MAXN = 1e6 + 10;
int arr[MAXN][2], bx, by, ex, ey, step = 0, n;
bool judge(int tx, int ty, int x, int y)
{
double tdis = sqrt((tx - ex) * (tx - ex) +(ty - ey) * (ty - ey));
double rdis = sqrt((x - ex) * (x - ex) +(y - ey) * (y - ey));
if(tdis < rdis)
return true;
return false;
}
int main()
{
//ios::sync_with_stdio(false);
//cin.tie(0); cout.tie(0);
cin>>bx>>by>>ex>>ey>>n;
char c;
for(int i = 0; i < n; i++)
{
cin>>c;
switch(c)
{
case 'E':
arr[i][0] = 1, arr[i][1] = 0;
break;
case 'S':
arr[i][0] = 0, arr[i][1] = -1;
break;
case 'W':
arr[i][0] = -1, arr[i][1] = 0;
break;
case 'N':
arr[i][0] = 0, arr[i][1] = 1;
break;
}
}
int tx, ty;
for(int i = 0; i < n; i++)
{
tx = bx + arr[i][0], ty = by + arr[i][1];
if(judge(tx, ty, bx, by))
bx = tx, by = ty, step++;
if(bx == ex && by == ey)
{
cout<<step<<endl;
goto l1;
}
}
cout<<"-1"<<endl;
l1:
return 0;
}

















 979
979

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









