




 本文详细介绍iOS开发中的核心动画Core Animation,包括其基本概念、使用步骤、关键类介绍及动画协议等,助您轻松掌握绚丽动画制作技巧。
本文详细介绍iOS开发中的核心动画Core Animation,包括其基本概念、使用步骤、关键类介绍及动画协议等,助您轻松掌握绚丽动画制作技巧。
今天给同学讲解一下 iOS开发中比较重要的核心动画Core Animation 那么废话不多说,直接上代码~
http://blog.youkuaiyun.com/ZZ_iOSdeveloper
- Core Animation简介
- Core Animation的使用步骤
- CAAnimation的使用(
核心) - CAPropertyAnimation的使用
- CAMediaTiming动画协议(protocol)属性解析
- 补充说明(
注意)
Core Animation简介
- Core Animation直接作用在CALayer上,非UIVIew;
- Core Animation,中文翻译为核心动画,它是一组非常强大的动画处理API,使用它能做出非常炫丽的动画效果,而且往往是事半功倍。也就是说,使用少量的代码就可以实现非常强大的功能。
- Core Animation是跨平台的,可以在mac和iOS中通用。
- Core Animation动画执行时是后台操作,所以不会堵塞主线程。(不阻塞主线程,即苹果为我们在执行完动画block后主动为我们释放了block对象,亦可以理解为在执行动画的时候还能执行操作)。
Core Animation的使用步骤
- 1.使用它需要先添加QuartzCore.framework框架和引入主头文件<QuartzCore/QuartzCore.h>(iOS7以后不需要)
- 2.初始化一个CAAnimation对象,并设置一些动画相关属性
- 3.通过调用CALayer的addAnimation:forKey:方法增加CAAnimation对象到CALayer中,这样就能开始执行动画了
- 4.通过调用CALayer的removeAnimationForKey:方法可以停止CALayer中的动画
CAAnimation的使用(核心)
- CAAnimation类继承结构图
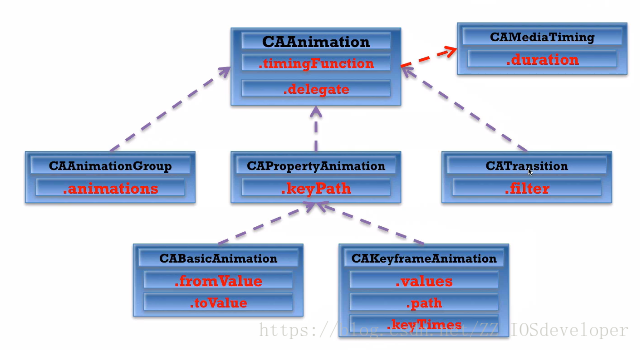
- CAAnimation是所有动画类的父类,但是它不能直接使用,应该使用它的子类。(
注意) - CAAnimation常见属性
duration:动画的持续时间
repeatCount:动画的重复次数
timingFunction:控制动画运行的节奏
- CAAnimation能用的动画子类
CABasicAnimation
CAKeyframeAnimation
CATransition
CAAnimationGroup
CAPropertyAnimation的使用
- CAPropertyAnimation是CAAnimation的子类,但是不能直接使用,要想创建动画对象,应该使用它的两个子类:
- CABasicAnimation和CAKeyframeAnimation
它有个NSString类型的keyPath属性,你可以指定CALayer的某个属性名为keyPath,并且对CALayer的这个属性的值进行修改,达到相应的动画效果。比如,指定@"position"为keyPath,就会修改CALayer的position属性的值,以达到平移的动画效果
CAMediaTiming动画协议(protocol)属性解析
duration:动画的持续时间
repeatCount:动画的重复次数
repeatDuration:动画的重复时间
removedOnCompletion:默认为YES,代表动画执行完毕后就从图层上移除,图形会恢复到动画执行前的状态。如果想让图层保持显示动画执行后的状态,那就设置为NO,不过还要设置fillMode为kCAFillModeForwards
fillMode:决定当前对象在非active时间段的行为。比如动画开始之前,动画结束之后
beginTime:可以用来设置动画延迟执行时间,若想延迟2s,就设置为CACurrentMediaTime()+2,CACurrentMediaTime()为图层的当前时间
timingFunction:速度控制函数,控制动画运行的节奏
delegate:动画代理
补充说明(注意)
- 所有动画对象的父类,负责控制动画的持续时间和速度,是个抽象类,不能直接使用,应该使用它具体的子类

















 1934
1934

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









