




VSCode基于arm-none-eabi-gcc交叉编译工具链的串口重定向printf输出和Keil MDK基于armcc工具链的串口重定向printf输出是不一样的,我按照以下链接①使用 VSCode 给STM32配置一个串口 printf 工程配置GCC的printf输出,以上解决了MCU—>电脑串口接收的问题,电脑串口—>MCU的发送问题还得需要拓展一下,可参考链接②基于 VsCode + GCC + STM32 环境下的串口输入输出重定向。
我这边的配置思路是:
1.修改Makefile脚本
该步骤是为了解决无法使用 printf 和 sprintf 打印浮点数的问题。
根据第1位作者,稍微修改Makefile,可能有人问了:怎么修改Makefile文件呀,修改哪里呀?不要慌,去参考上面的第1个作者链接,打开你工程的Makefile文件,快捷键按下trl+F搜索 LDFLAGS ,然后添加下图的红方框内容,

顺便附上这段源码:
# libraries
LIBS = -lc -lm -lnosys
LIBDIR =
LDFLAGS = $(MCU) -flto -u_printf_float -u_scanf_float -specs=nano.specs -specs=nosys.specs -T$(LDSCRIPT) $(LIBDIR) $(LIBS) -Wl,-Map=$(BUILD_DIR)/$(TARGET).map,--cref -Wl,--gc-sections,--print-memory-usage,--no-warn-rwx-segments
2.引入syscalls.c源文件
在工程目录下的HARDWARE文件夹下建立一个syscalls.c源文件,复制下述的syscalls.c代码,粘贴代码到新建立的syscalls.c源文件。

syscalls.c:
/**
Support files for GNU libc. Files in the system namespace go here.
Files in the C namespace (ie those that do not start with an
underscore) go in .c.
**/
/**
* @file syscalls.c
**/
/* Includes */
#include <sys/stat.h>
#include <stdlib.h>
#include <errno.h>
#include <stdio.h>
#include <signal.h>
#include <time.h>
#include <sys/time.h>
#include <sys/times.h>
#include "usart1.h"
/* Variables */
// #undef errno
extern int errno;
extern int __io_putchar(int ch) __attribute__((weak));
extern int __io_getchar(void) __attribute__((weak));
register char *stack_ptr asm("sp");
char *__env[1] = {0};
char **environ = __env;
/* Functions */
void initialise_monitor_handles()
{
}
int _getpid(void)
{
return 1;
}
int _kill(int pid, int sig)
{
errno = EINVAL;
return -1;
}
void _exit(int status)
{
_kill(status, -1);
while (1)
{
} /* Make sure we hang here */
}
/* Functions */
__attribute__((weak)) int _read(int file, char *ptr, int len)
{
(void)file;
int DataIdx;
for (DataIdx = 0; DataIdx < len; DataIdx++)
{
*ptr++ = __io_getchar();
}
return len;
}
__attribute__((weak)) int _write(int file, char *ptr, int len)
{
(void)file;
int DataIdx;
for (DataIdx = 0; DataIdx < len; DataIdx++)
{
__io_putchar(*ptr++);
}
return len;
}
// 条件编译
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#define GETCHAR_PROTOTYPE int __io_getchar(void)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#define GETCHAR_PROTOTYPE int fgetc(FILE *f)
#endif /* __GNUC__ */
/* 使用GCC编译器时,调用 _write 和 _read */
/* #ifdef __GNUC__ */
/**
* 函数功能: 重定向 c库函数 printf到 DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF); //阻塞式无限等待
## 注释:如使用STM32标准库,请注释掉上述的HAL_UART_Transmit(),使用该代码段。
## 注释:下述宏定义USART1存在于头文件#include "stm32f4xx.h",故将顶部头文件包含的 #include "usart1.h" 替换成 #include "stm32f4xx.h"。
# while (!USART_GetFlagStatus(USART1, USART_FLAG_TXE)) // 假如没有收到
# {
# }
# USART_SendData(USART1, (u8)ch);
## 注释:如使用STM32标准库,请注释掉上述的HAL_UART_Transmit(),使用该代码段。
return ch;
}
/**
* 函数功能: 重定向 c库函数 getchar,scanf到 DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
GETCHAR_PROTOTYPE
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xFFFF);
# 注释:如使用STM32标准库,请注释掉上述的HAL_UART_Receive(),使用该代码段。
# 注释:下述宏定义USART1存在于头文件#include "stm32f4xx.h",故将顶部头文件包含的 #include "usart1.h" 替换成 #include "stm32f4xx.h"。
# uint8_t ch = 0;
# while (!USART_GetFlagStatus(USART1, USART_FLAG_RXNE))
# {
# }
# USART_ReceiveData(USART1);
# 注释:如使用STM32标准库,请注释掉上述的HAL_UART_Receive(),使用该代码段。
return ch;
}
/* 非GCC模式才允许编译使用,即使用 Keil、IAR 的工具链等,调用 fputc 和 fgetc */
#ifndef __GNUC__
/**
* @brief 重定向 C 标准库 printf 函数到串口 huart1
* 适用于 Keil、IAR 等IDE;不适用 GCC
* @usage printf("USART1_Target:\r\n");
*/
PUTCHAR_PROTOTYPE
{
//采用轮询方式发送1字节数据,超时时间为无限等待
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,HAL_MAX_DELAY); //huart1是串口的句柄
return ch;
}
/**
* @brief fgets 重定向
* 重定向 C 标准库 scanf 函数到串口 huart1
* 注意以 空格 为结束
* @param f
* @return int
*
* @usage scanf("%c", &RecData);
*/
GETCHAR_PROTOTYPE
{
uint8_t ch;
HAL_UART_Receive(&huart1, (uint8_t *)&ch, 1, HAL_MAX_DELAY); //huart1是串口的句柄
return ch;
}
#endif /* __GNUC__ */
caddr_t _sbrk(int incr)
{
extern char end asm("end");
static char *heap_end;
char *prev_heap_end;
if (heap_end == 0)
heap_end = &end;
prev_heap_end = heap_end;
if (heap_end + incr > stack_ptr)
{
// write(1, "Heap and stack collision\n", 25);
// abort();
errno = ENOMEM;
return (caddr_t)-1;
}
heap_end += incr;
return (caddr_t)prev_heap_end;
}
int _close(int file)
{
return -1;
}
int _fstat(int file, struct stat *st)
{
st->st_mode = S_IFCHR;
return 0;
}
int _isatty(int file)
{
return 1;
}
int _lseek(int file, int ptr, int dir)
{
return 0;
}
int _open(char *path, int flags, ...)
{
/* Pretend like we always fail */
return -1;
}
int _wait(int *status)
{
errno = ECHILD;
return -1;
}
int _unlink(char *name)
{
errno = ENOENT;
return -1;
}
int _times(struct tms *buf)
{
return -1;
}
int _stat(char *file, struct stat *st)
{
st->st_mode = S_IFCHR;
return 0;
}
int _link(char *old, char *new)
{
errno = EMLINK;
return -1;
}
int _fork(void)
{
errno = EAGAIN;
return -1;
}
int _execve(char *name, char **argv, char **env)
{
errno = ENOMEM;
return -1;
}
上述笔者贴出的
syscalls.c系统调用文件,是在ST官方的syscalls.c原文件基础上,增加了__GNUC__和非__GNUC__的条件编译代码。
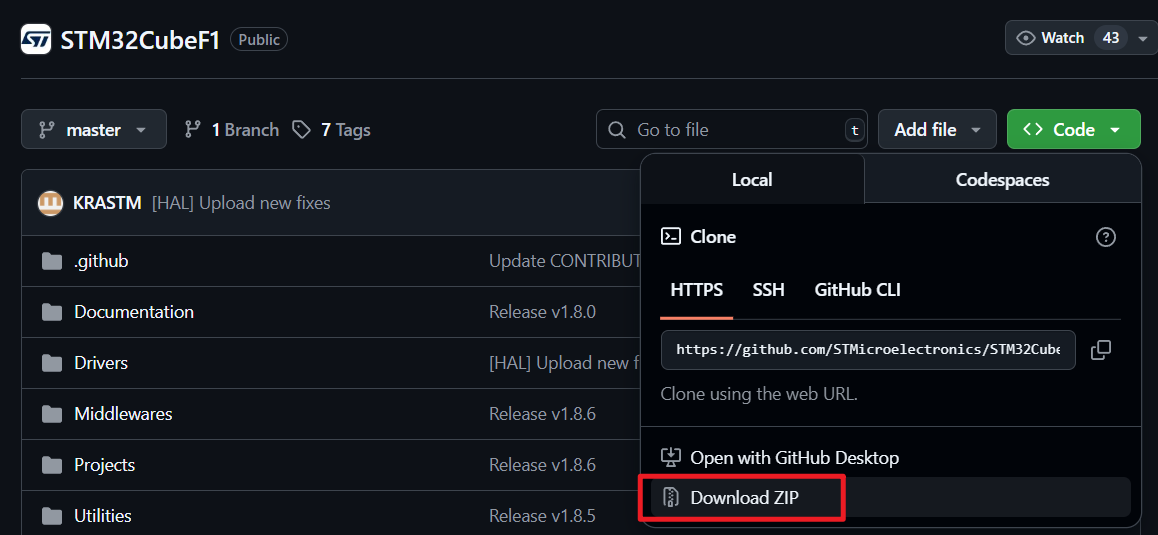
syscalls.c官方原文件获取方式:
① 打开ST官网—STM32CubeF1,滑动到最底部,点击Get from GitHub;
② 下载STM32CubeF1-1.8.6.zip后将其解压缩;
③ 根据以下路径【.\STM32CubeF1-1.8.6\Projects\STM32F103RB-Nucleo\Examples\UART\UART_Printf\SW4STM32】,可获取到syscalls.c文件。

添加完syscalls.c源文件后,我们是不是要将这个syscalls.c源文件引入Makefile脚本,让脚本构建、编译文件?
所以使用鼠标右键复制工程目录下syscalls.c文件的相对路径,再打开Makefile脚本,快捷键ctrl+F搜索找到下图的C_SOURCES位置,将相对路径粘贴到红色箭头处,即可成功引入源文件到Makefile,如下图所示。
到这里可能有人会问了:为什么要将新建的.c源文件引入Makefile呢?
好的,这里请参考我写的另一篇笔记:VSCode+arm-none-eabi-gcc交叉编译+Makefile构建+OpenOCD(基于STM32的HAL库)

接下来我们开始编译……嗯……想必过程不会如此顺利,果不其然地会报错,如下图。
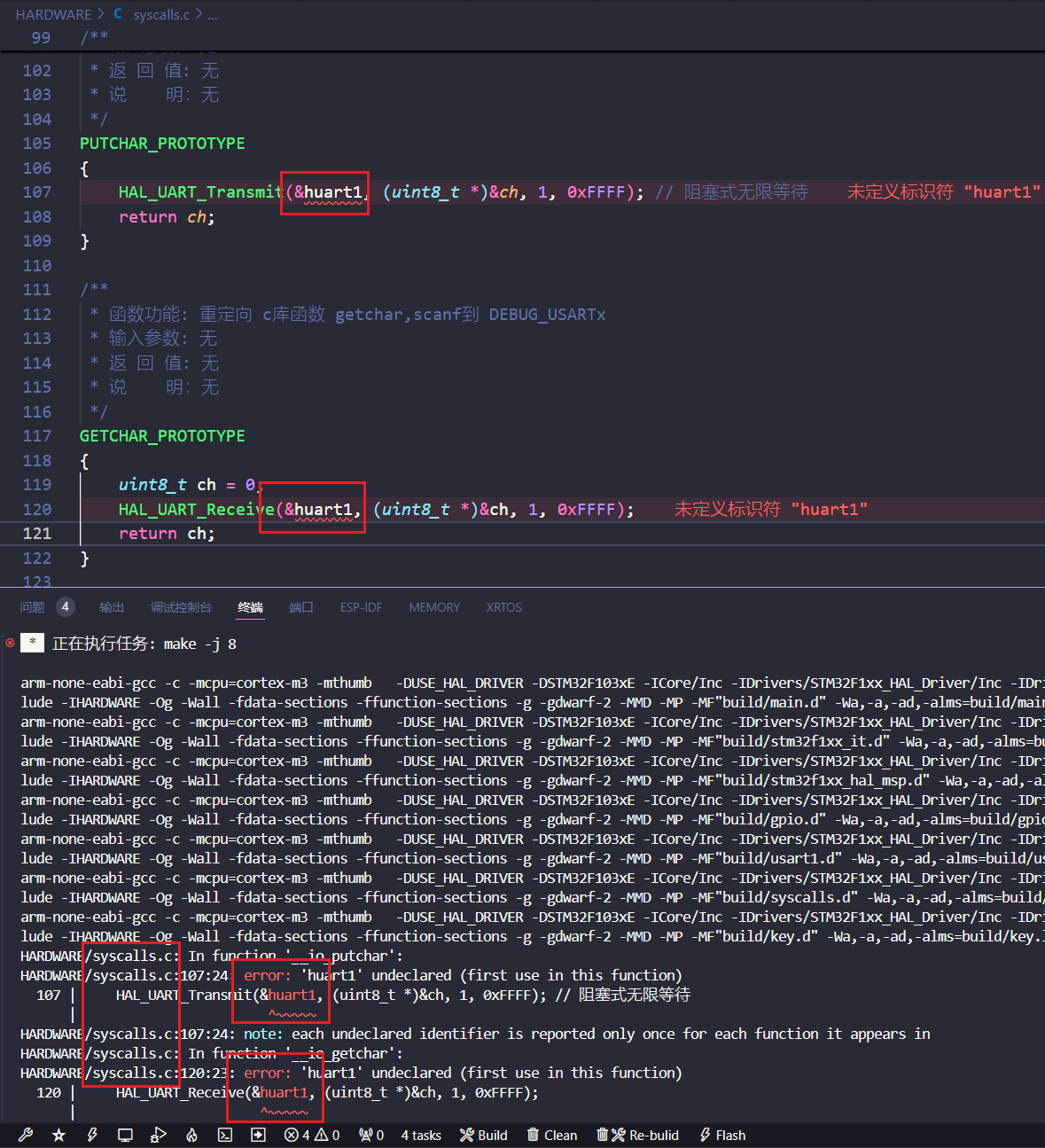
报了syscalls.c中没有定义结构体句柄huart1的错误,这里先附上我的usart1.c和usart1.h代码:
usart1.c:
#include "usart1.h"
UART_HandleTypeDef huart1;
/*************************************************************************************************
* 函 数 名: HAL_UART_MspInit
* 入口参数: huart - UART_HandleTypeDef定义的变量,即表示定义的串口
* 返 回 值: 无
* 函数功能: 初始化串口引脚
* 说 明: 无
*************************************************************************************************/
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if (huart->Instance == USART1)
{
__HAL_RCC_USART1_CLK_ENABLE(); // 开启 USART1 时钟
GPIO_USART1_TX_CLK_ENABLE; // 开启 USART1 TX 引脚的 GPIO 时钟
GPIO_USART1_RX_CLK_ENABLE; // 开启 USART1 RX 引脚的 GPIO 时钟
GPIO_InitStruct.Pin = USART1_TX_PIN; // TX引脚
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; // 复用推挽输出
GPIO_InitStruct.Pull = GPIO_PULLUP; // 上拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // 速度等级
HAL_GPIO_Init(USART1_TX_PORT, &GPIO_InitStruct);
GPIO_InitStruct.Pin = USART1_RX_PIN; // RX引脚
HAL_GPIO_Init(USART1_RX_PORT, &GPIO_InitStruct);
}
}
/*************************************************************************************************
* 函 数 名: USART1_Init
* 入口参数: 无
* 返 回 值: 无
* 函数功能: 初始化串口配置
* 说 明: 无
*************************************************************************************************/
void USART1_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = USART1_BaudRate;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
while (HAL_UART_Init(&huart1) != HAL_OK)
{
}
}
usart1.h:
#ifndef __USART1_H
#define __USART1_H
#include <stdio.h>
#include "stm32f1xx_hal.h"
/*-------------------------------------------- USART配置宏 ---------------------------------------*/
#define USART1_BaudRate 115200
#define USART1_TX_PIN GPIO_PIN_9 // TX 引脚
#define USART1_TX_PORT GPIOA // TX 引脚端口
#define GPIO_USART1_TX_CLK_ENABLE __HAL_RCC_GPIOA_CLK_ENABLE() // TX 引脚时钟
#define USART1_RX_PIN GPIO_PIN_10 // RX 引脚
#define USART1_RX_PORT GPIOA // RX 引脚端口
#define GPIO_USART1_RX_CLK_ENABLE __HAL_RCC_GPIOA_CLK_ENABLE() // RX 引脚时钟
/*---------------------------------------------- 函数声明 ---------------------------------------*/
void USART1_Init(void); // USART1初始化函数
#endif
我在源文件里面已经定义结构体句柄UART_HandleTypeDef huart1;了,之所以报错,是因为syscalls.c是个源文件,没有引入huart1这个结构体句柄,我们需要在syscalls.c里面包含 #include “usart1.h” ,

同时在头文件usart1.h里面extern结构体句柄huart1,如下图所示

这样句柄huart1就引入syscalls.c里面了,最终在main.c里写上测试代码,看看能否打印 整型 和 单/双精度浮点型 数据(实验归实验,大家还是少用extern,因为这样会提高程序的耦合性,后续难以移植)
main.c:
int main(void)
{
uint16_t a = 128; // 测试整形变量
float b = 9.123456; // 测试单精度浮点型变量,小数点后6位
double c = 3.141592653589793; // 测试双精度浮点型变量,小数点后15位
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
USART1_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
printf("STM32 串口实验 \r\n");
printf("printf函数测试 \r\n");
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
// cnt--;
// while (!cnt)
// {
// cnt = 0;
// }
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_0);
HAL_Delay(500);
/* USER CODE END WHILE */
printf("十进制格式: %d\r\n", a);
printf("十六进制格式:%x\r\n", a);
printf("单精度小数格式: %f\r\n", b);
printf("双精度小数格式: %.15lf\r\n", c);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
对整个工程编译,到这里就是大家最喜欢看到的0 error,0 warning了,下载程序,观察到实验现象,结束。后面就可以开开心心地使用printf打印信息了。



















 948
948



 到【灌水乐园】发言
到【灌水乐园】发言








