






本文募格学术撰写。参考资料:江苏省教育厅、微博、小红书、知乎、MBA百科等。
毕业1年后,硕士学位论文抽检还是来了。
7月18日,江苏省率先打出论文抽检第一枪。
2023年省硕士学位论文抽检评议工作会议在南京召开。省教育厅副厅长袁靖宇出席会议并讲话。在全省39家培养单位的共同见证下,按照全面覆盖、问题跟踪、重点防范、奖优减负的原则,现场抽取产生了2023年度硕士学位论文抽检名单。本年抽检论文3191篇,其中学术学位论文1264篇,专业学位论文1927篇。
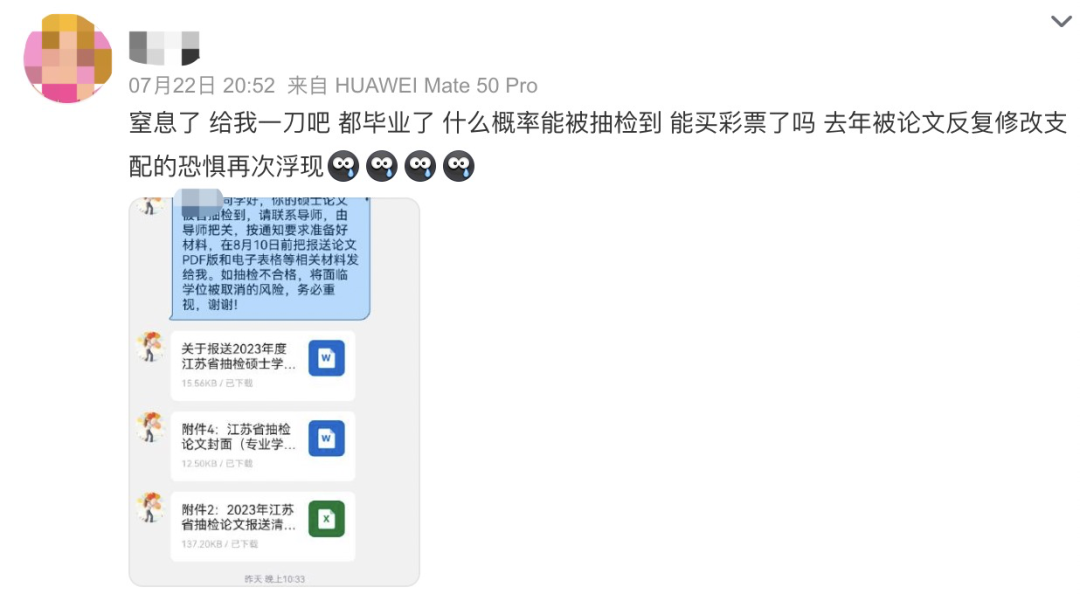
微博上,第一批被抽到的硕士生已经开始重新体验被论文支配的恐惧了。

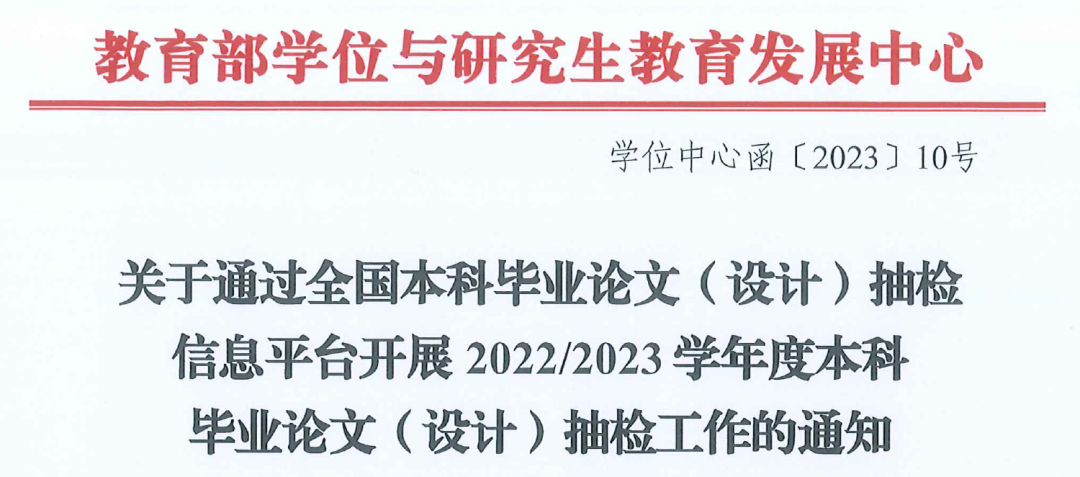
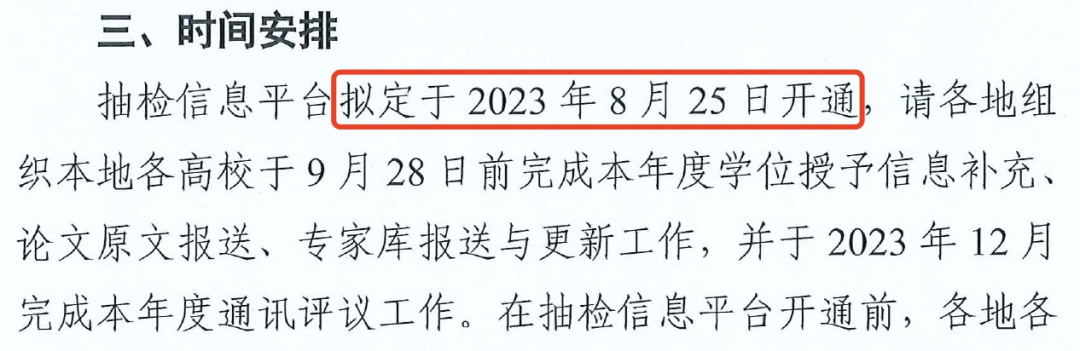
并且,根据消息,在即将到来的8月,全国本科论文抽检工作也将如期开展。
毕业即上岸的历史真的一去不复返,虽然不同学历层次、学科门类的抽检评议要素各不相同,但论文判定方法基本一致:只要累计两位专家给出“不合格”的评议意见,该论文便为“存在问题论文”。
也不怪被抽到的朋友慌的要死,如果论文抽检不合格,是会取消学位证书的。
北大博士抽检没过
被撤销学位
此前,在北大未名BBS上,有网友发帖表示:双证毕业后,还是会继续审查论文,北大有5个博士没有通过论文二次抽检,直接撤销学位。

同样感受到论文抽查“痛苦”的研究生也有很多,不管你是去读博了还是已经工作,抽到了,那就是一次新的论文渡劫...
图源:小红书
研究生毕业一年半在读博时被抽查到了论文
虽然大多数人论文都能安全通关,但还真有一些倒霉蛋子被抽检不合格,只能在知乎和各大平台上询问大家有没有解决办法。
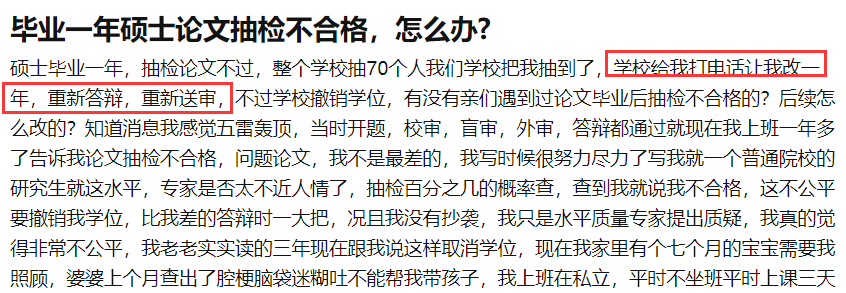
据描述,题主硕士都毕业一年了,被通知论文抽检不合格,学校让其再改一年,重新答辩和送审,本来自己都工作要定讲师了,现在又得重新回去改论文,不然学位证书可能会受到影响。
最后,题主也只能回去和导师商量,重新开始了论文修改。
据悉,论文抽查是教育部是为了制止抄袭学术造假的行为,让各位毕业生重视论文的原创性。文献抽查主要包括论文的选题、逻辑性、研究方案、计划和全文,以及与文章初评与复评有关的资料。在抽查过程中,如果发现你这篇论文有什么问题,一般情况下可以让学生稍作修改,如果经核实,发现你这篇毕业论文存在抄袭或篡改、代写等学术不端行为,将直接取消你的学位证书。
所以论文还是要好好写,好好改,千万不能糊弄。如果抽检被专家判定不合格,会先责令你限期整改。但若经整改仍无法达到要求者,将撤销学位授权。

毕业不等于进保险箱
2020年以来,多地区要求以省教育厅为组织单位,开展对已授予硕士学位论文的重新抽检。
在8月,陆续将有更多的省份加入到抽检硕士论文的大军中。
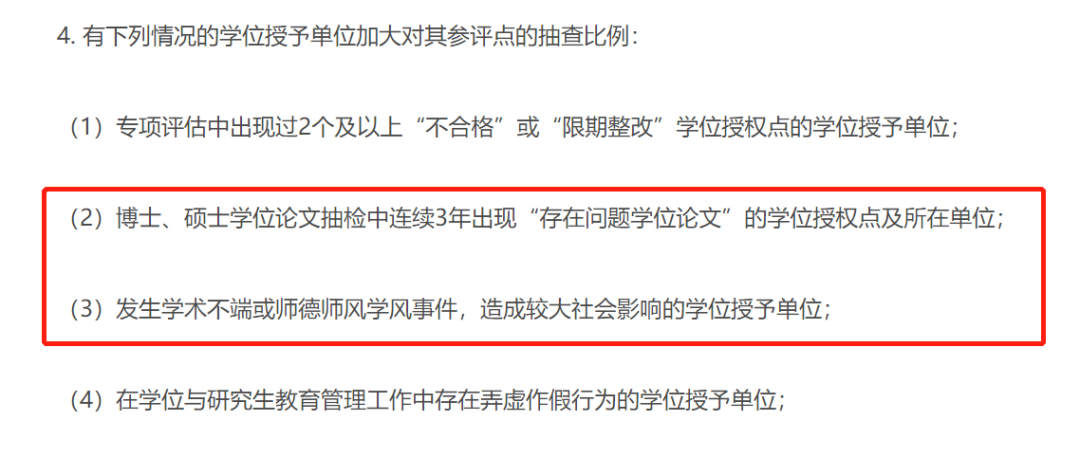
拿江苏省举例,硕士论文的抽检比例为5%左右,同时,还会对上一学年存在不合格评议结果的论文进行一个跟踪抽检。
抽检比例看似不高,但有一年,江苏省144篇硕士论文被撤销学位。放在大环境看,这个比例也着实不低。
同时,如果查出来论文有问题,一方面,学校会被约谈,另一方面,指导导师当年立即停招。
种种强化审查下,史上最严苛的论文审核确确实实拉开了序幕,对待毕业论文,千万不能持侥幸心理,即使当时过关了,也不意味着进入保险箱。
如果抽检到了
也别慌
最后,如果真的论文在毕业后被抽检到了,也别慌。合格的话自然皆大欢喜,万一不合格,对照不合格意见,和导师商量逐一进行修改,再找相关专业的人辅导一下,基本都能过关。
说到底,希望每个人都能实打实的写好自己的论文,人生海海,愿我们在读研的海域里成功各自登陆吧。
—END—高效学习3D视觉三部曲
第一步 加入行业交流群,保持技术的先进性
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶方向,细分群包括:[工业方向]三维点云、结构光、机械臂、缺陷检测、三维测量、TOF、相机标定、综合群;[SLAM方向]多传感器融合、ORB-SLAM、激光SLAM、机器人导航、RTK|GPS|UWB等传感器交流群、SLAM综合讨论群;[自动驾驶方向]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器讨论群、多传感器标定、自动驾驶综合群等。[三维重建方向]NeRF、colmap、OpenMVS等。除了这些,还有求职、硬件选型、视觉产品落地等交流群。大家可以添加小助理微信: dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。
第二步 加入知识星球,问题及时得到解答
针对3D视觉领域的视频课程(三维重建、三维点云、结构光、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业、项目对接为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:「3D视觉从入门到精通」
学习3D视觉核心技术,扫描查看,3天内无条件退款
第三步 系统学习3D视觉,对模块知识体系,深刻理解并运行
如果大家对3D视觉某一个细分方向想系统学习[从理论、代码到实战],推荐3D视觉精品课程学习网址:www.3dcver.com
基础课程:
[1]面向三维视觉算法的C++重要模块精讲:从零基础入门到进阶
工业3D视觉方向课程:
[1](第二期)从零搭建一套结构光3D重建系统[理论+源码+实践]
SLAM方向课程:
[1]如何高效学习基于LeGo-LOAM框架的激光SLAM?
[2]彻底剖析激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战
[3](第二期)彻底搞懂基于LOAM框架的3D激光SLAM:源码剖析到算法优化
[4]彻底搞懂视觉-惯性SLAM:VINS-Fusion原理精讲与源码剖析
[5]彻底剖析室内、室外激光SLAM关键算法和实战(cartographer+LOAM+LIO-SAM)
视觉三维重建
[1]彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进)
自动驾驶方向课程:
[1] 深度剖析面向自动驾驶领域的车载传感器空间同步(标定)
[2]面向自动驾驶领域目标检测中的视觉Transformer


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









