




 这篇笔记涵盖了MIT线性代数的Lecture9和Lecture10,主要内容包括线性相关性和无关性的概念,生成空间、基与维数的讨论,以及线性代数中的四个基本子空间——列空间、零空间、行空间和左零空间。解释了列向量的线性相关性与零空间的关系,以及这四个子空间的基和维数。此外,还介绍了将矩阵视为向量的新视角及其子空间的特性。
这篇笔记涵盖了MIT线性代数的Lecture9和Lecture10,主要内容包括线性相关性和无关性的概念,生成空间、基与维数的讨论,以及线性代数中的四个基本子空间——列空间、零空间、行空间和左零空间。解释了列向量的线性相关性与零空间的关系,以及这四个子空间的基和维数。此外,还介绍了将矩阵视为向量的新视角及其子空间的特性。
Lecture9 线性无关,生成空间,基和维数
1. 线性相关性
- 背景
当矩阵A列数大于行数时,很有可能有无穷多个非零解,因为存在自由变量。 - 线性相关性
设有向量v1,v2,... ... ,vnv_1,v_2,... \ ... \ ,v_nv1,v2,... ... ,vn,在什么情况下v1,v2,... ... ,vnv_1,v_2,... \ ... \ ,v_nv1,v2,... ... ,vn线性无关?
1. 定义
若不存在v1,v2,... ... ,vnv_1,v_2,... \ ... \ ,v_nv1,v2,... ... ,vn的非零线性组合,其结果为零向量,称v1,v2,... ... ,vnv_1,v_2,... \ ... \ ,v_nv1,v2,... ... ,vn线性无关。
反之称为向量组线性相关。
含零向量的向量组一定线性相关。
如果将所有向量(列向量)合并成矩阵AAA:
若AAA的零空间内有非零向量,AAA的列向量线性相关,r=nr=nr=n。
若AAA的零空间内只有零向量,AAA的列向量线性无关,r<nr<nr<n。
2.生成空间(Spanning a space),基(Basis),维数(Dimension)
- 生成空间
v1,v2,... ... ,vlv_1,v_2,... \ ... \ ,v_lv1,v2,... ... ,vl的生成空间包含了v1,v2,... ... ,vlv_1,v_2,... \ ... \ ,v_lv1,v2,... ... ,vl的所有线性组合。
也就可以看作,这个空间是由这些向量生成(span)的。 - 基
一个向量空间的基可以看做是具有如下两个性质的一组向量:
(1)这些向量线性无关。
(2)它们生成了整个空间。
在RnR_nRn中的一组基构成的矩阵是不可逆的(invertible)。
向量空间的基不是唯一的。 - 维数
给定一个向量空间,其基中向量的数量是固定的,称为这个向量空间的维数(Dimension)。
Rank of A = # of pivot = Dimension of C(A)
3.零空间维数的讨论
通过以上我们得知了列空间的维数为rrr,代表的是所有列向量中的最大线性无关的个数。
零空间研究的是AAA的线性相关的问题。
Dimension of N(A) = # of free variables = n - r
Lecture10 四个基本子空间
1.四个基本子空间介绍
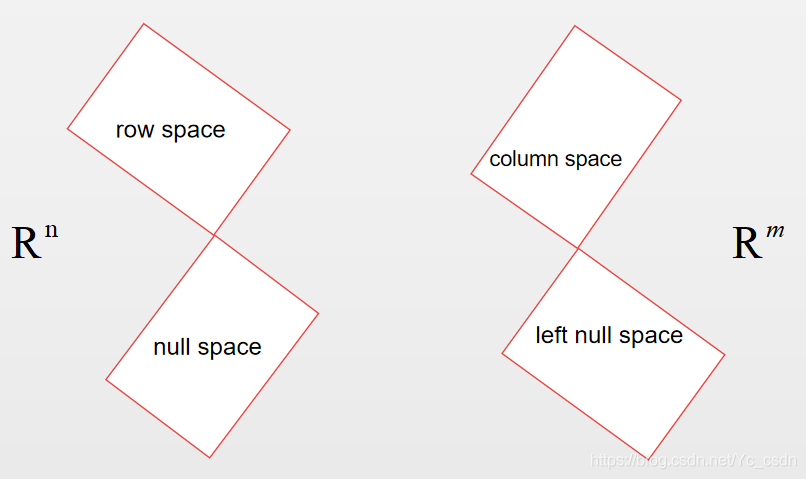
四个基本子空间的概念是线性代数的核心,假设Am×nA_{m\times n}Am×n,它的四个子空间为
- 列空间C(A)C(A)C(A)
是RmR_mRm的子空间。 - 零空间N(A)N(A)N(A)
是RnR_nRn的子空间 - 行空间C(AT)C(A^T)C(AT)
AAA的行向量生成的空间,若仍采用列向量表示,也就是C(AT)C(A^T)C(AT)。
是RnR_nRn的子空间 - 左零空间
原矩阵AAA转置的零空间N(AT)N(A^T)N(AT)。
是RmR_mRm的子空间
四个子空间如下图所示:
- 子空间的基和维数
- C(A)C(A)C(A)
维数为rrr (rrr为AAA的秩)。
基可由AAA的主元列构成。 - N(A)N(A)N(A)
维数为n−rn-rn−r。
基可以由进行消元操作后几个自由变量取不同的值得到,详见Lecture7-8。 - C(AT)C(A^T)C(AT)
维数为rrr。
初等行变换不改变行空间,因为相当于行的线性组合。
所以基是由RRR的前rrr行决定的。RRR是经过行变换化简之后的最终A矩阵,前rrr行均为非零行。
由此也可以看出行空间的维数为rrr,因为有rrr个主元行,它们线性无关。 - N(AT)N(A^T)N(AT)
维数为m−rm-rm−r。
Why left null space?
首先根据定义:设左零空间内的向量为yyy,ATy=0A^Ty=0ATy=0。
两边取转置即为:
yTA=0y^TA=0yTA=0
How to get left null space?
使用高斯若尔消元法,也就是类似求A−1A^{-1}A−1的方法:
[Am×n∣Im×m ]\begin{bmatrix}A_{m\times n}&|&I_{m\times m} \ \ \end{bmatrix}[Am×n∣Im×m ]
使用消元法使得A→RA\rightarrow RA→R,得到:
[Rm×n∣Em×m ] \begin{bmatrix}R_{m\times n}&|&E_{m\times m} \ \ \end{bmatrix}[Rm×n∣Em×m ]
由高斯消元法的思想,将AAA变为RRR的过程相当于左乘EEE矩阵。
即:EA=REA=REA=R
回顾前面逆矩阵所讲的,最终R=I,E=A−1R=I,E=A^{-1}R=I,E=A−1。
而这是一个长方形矩阵,不能得到逆矩阵。
这时构建这个E的意义在于,EEE的最后m−rm-rm−r行构成左零空间的一组基。
原因:在矩阵乘法的一种思考方式是,一个矩阵左乘一个行向量表示的是矩阵行的线性组合。观察EA=REA=REA=R,RRR的最后的m−rm-rm−r行一定是0,因为行空间的秩为rrr。
EEE的最后m−rm-rm−r每一行r∗r^*r∗均满足r∗TA=0{r^*}^TA=0r∗TA=0
因为EEE是可逆的,所以最后m−rm-rm−r行一定也是线性无关的,构成了左零空间的一组基。
2.一种新的向量空间
本节课最后,提出了一种新的向量空间,空间内的向量是一个个的矩阵,也就是把矩阵看做向量。
因为矩阵也满足加法和数乘的封闭性(不考虑矩阵乘法)。
- 这种新向量空间的子空间
假设一个矩阵构成的空间为MMM。
上三角矩阵,对称矩阵,对角矩阵均为MMM的子空间。

















 924
924

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









