







 本文详细介绍了在自动车道保持和轨迹跟踪场景下,基于路面误差的车辆动力学模型。模型包括四个状态变量:横向误差、横向误差率、航向误差和航向误差率。通过状态空间表达式展示了模型的推导过程,并指出在实际应用中,由于轨迹的平滑性,某些项可以忽略。此外,还提到了横向误差和横向误差变化率的另一种表示方法,来源于Frenet坐标系的推导。
本文详细介绍了在自动车道保持和轨迹跟踪场景下,基于路面误差的车辆动力学模型。模型包括四个状态变量:横向误差、横向误差率、航向误差和航向误差率。通过状态空间表达式展示了模型的推导过程,并指出在实际应用中,由于轨迹的平滑性,某些项可以忽略。此外,还提到了横向误差和横向误差变化率的另一种表示方法,来源于Frenet坐标系的推导。
车辆动力学知识总结(四) 基于路面误差的动力学模型
参考资料:
Apollo代码学习(三)—车辆动力学模型_follow轻尘的博客-优快云博客_车辆动力学符号
https://blog.youkuaiyun.com/u013914471/article/details/83018664
目录
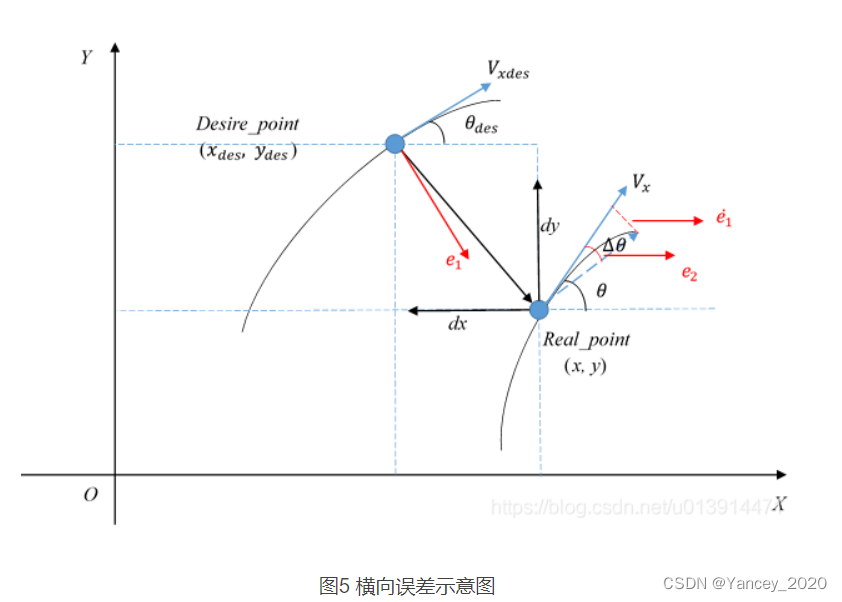
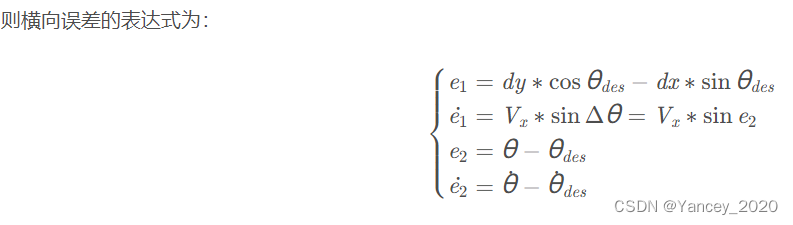
3、横向误差和横向误差变化率的另一种表示方法(从Frenet推导)
我的在线笔记
1 状态变量
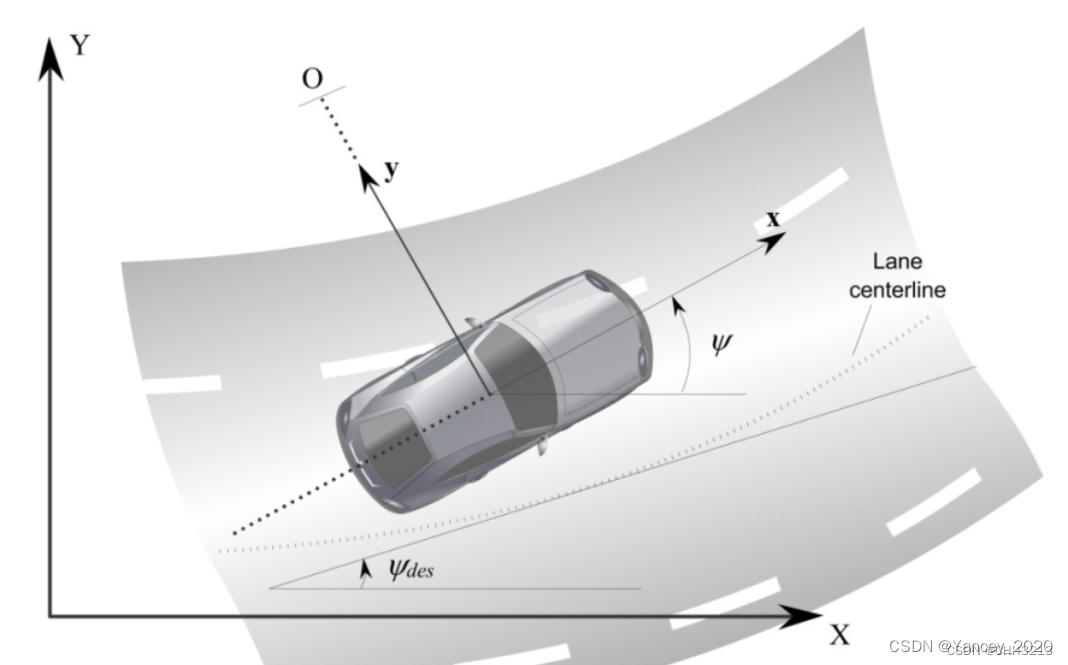
当研究目的是自动车道保持的转向控制系统时,使用相对路面的位置及方向误差这类状态变量的动力学模型更为有效。
一般在做车道保持或轨迹跟踪时,常常使用基于路面误差的动力学模型,此模型基于二自由度车辆动力学模型演化而来。
根据《车辆动力学及控制》或Apollo,横向控制的状态变量有4个:
横向误差 lateral_error e1
横向误差率 latetal_error_rate e1_dot
航向误差 heading_error e2
航向误差率 heading_error_rate e2_dot
横向误差e1表示车辆质心距车道中心线的距离,e2为航向误差,不过书中表示成了横摆角误差。
考虑车辆在半径为R的车道上以恒定纵向速度Vx行驶,此时有:
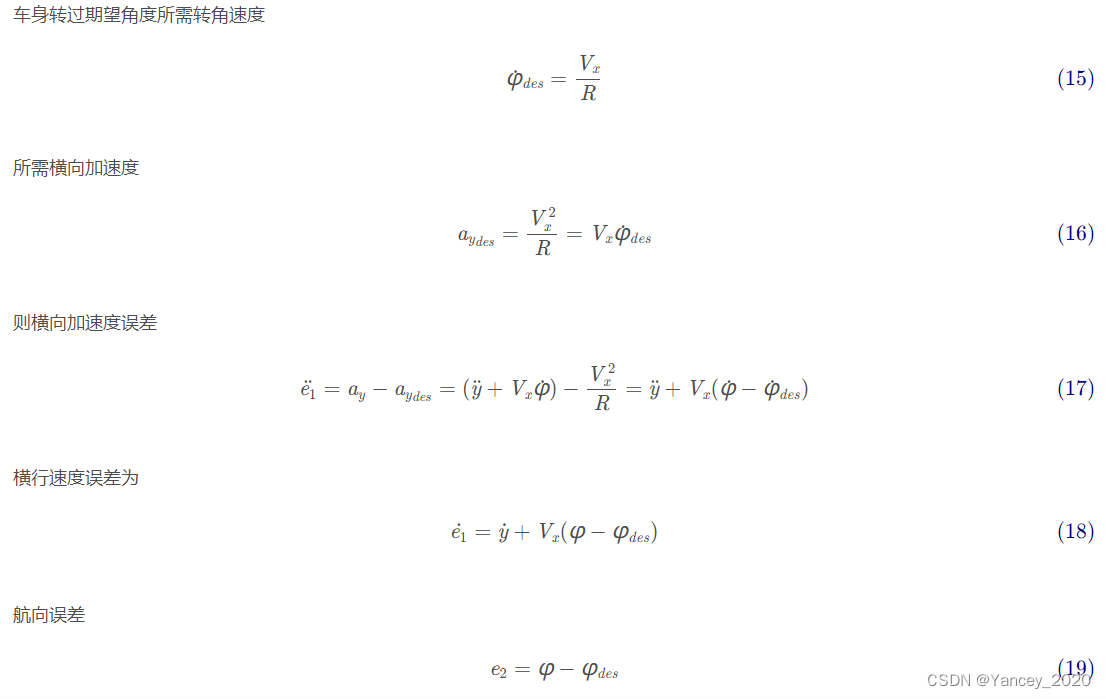
2 公式推导
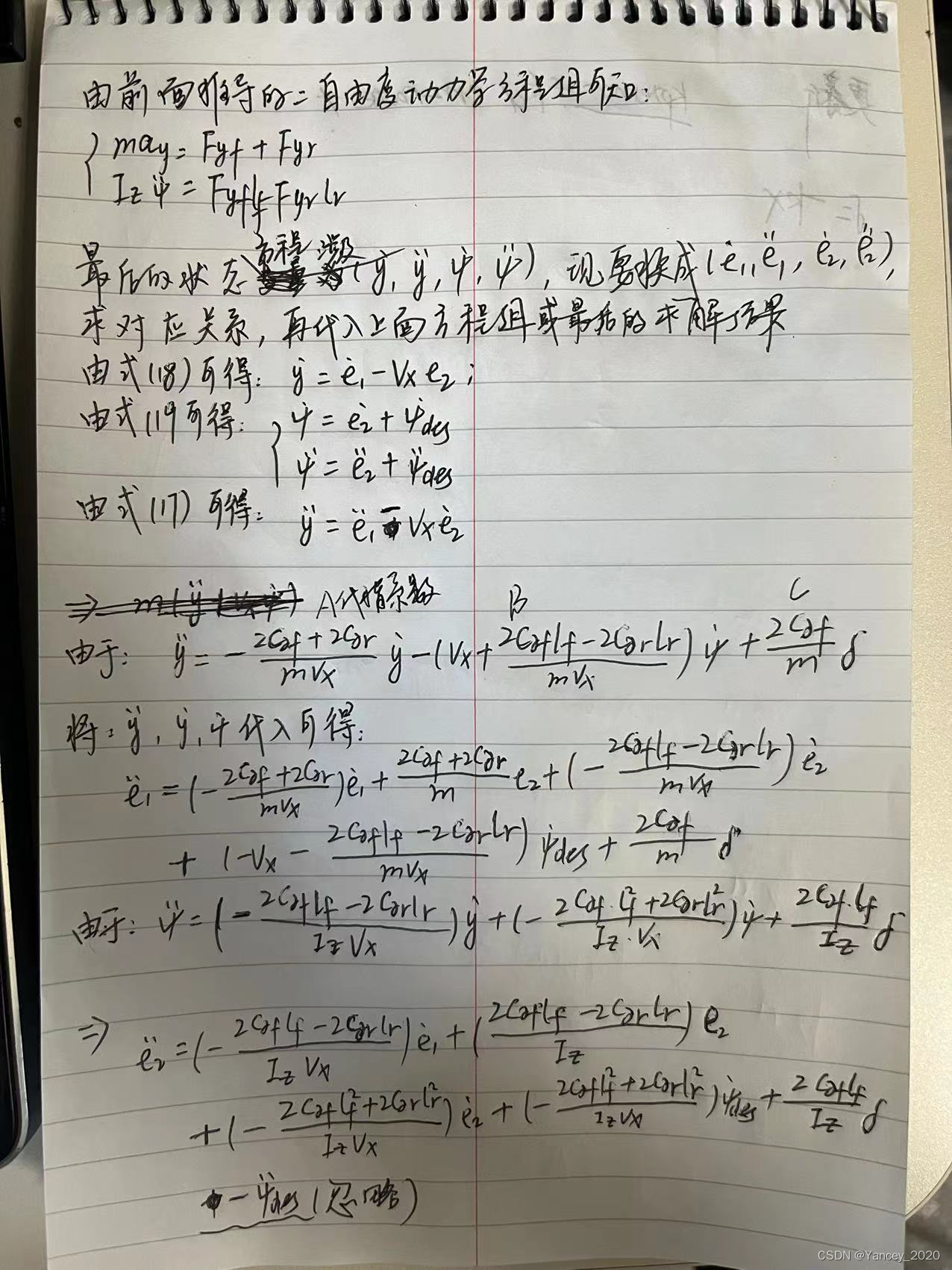
最后的状态空间表达式为:
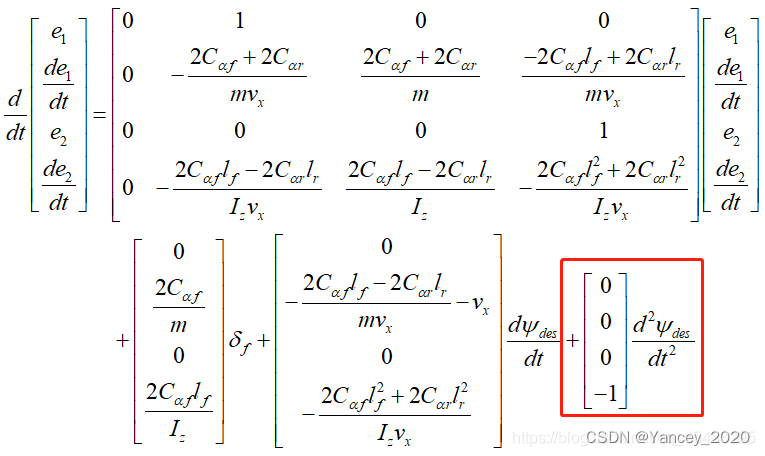
需要注意:
- 一般规划模块给出的轨迹比较平滑,因此公式里的最后一项(红框里标注部分)通常很小,可忽略不计。
- 公式推导中侧偏刚度为单个轮胎的,Apollo是两侧轮胎之和。
- 不考虑坡度;若考虑,在右侧加一项[0,0,g,0]Tsinφ
- 该模型主要用于Apollo中LQR和MPC问题的建模
3、横向误差和横向误差变化率的另一种表示方法(从Frenet推导)
详细推导可查看车辆控制知识总结之纵向误差PID算法 或找博客https://blog.youkuaiyun.com/u013914471/article/details/83018664


















 1309
1309

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









