



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
四旋翼飞行器是一种能够垂直起降和悬停的飞行器,由四个独立的旋翼推进器提供动力。它们通常被用于航拍、搜救和军事应用等领域。而悬链机器人是一种由缆绳悬挂并由外部推动的机器人,常用于高空作业和建筑清洁等领域。
设计和控制由两个四旋翼飞行器推动的缆绳研究,可以将两个四旋翼飞行器连接在一起,通过缆绳将它们与悬链机器人连接。这样的设计可以使悬链机器人具有更强的动力和稳定性,从而提高其在高空作业和其他领域的应用效率。
在控制方面,需要设计一套复杂的控制系统来协调两个四旋翼飞行器的动作,确保它们能够有效地推动悬链机器人并保持平衡。这可能涉及到对飞行器的姿态控制、飞行路径规划和动力分配等方面的研究。
设计和控制由两个四旋翼飞行器推动的缆绳研究是一项复杂而具有挑战性的工作,但它有望为悬链机器人的应用带来新的突破和进展。通过充分发挥四旋翼飞行器的优势,可以为悬链机器人赋予更大的动力和灵活性,从而拓展其在各种领域的应用范围。
由双四旋翼飞行器推动的缆绳机器人动态模拟与控制研究
1. 系统概述与问题定义
本研究聚焦于由两个四旋翼飞行器协同驱动的缆绳机器人系统,旨在实现复杂任务(如协作运输、环境探测)中的动态稳定性与精确控制。系统的核心挑战包括:
- 四旋翼动力学耦合:需协调双飞行器的升力、扭矩与姿态;
- 缆绳悬链线效应:大跨度缆绳的自重下垂与非线性张力分布;
- 刚柔耦合建模:缆绳柔性特性与四旋翼刚体运动的交互;
- 协同控制鲁棒性:通信延迟与外界扰动下的稳定性。
2. 四旋翼飞行器动力学建模
2.1 基本结构与驱动原理
四旋翼采用对称布局,旋翼1/3逆时针旋转,2/4顺时针旋转以抵消陀螺效应。升力模型为:

其中 b 为升力系数,ωi 为旋翼转速。总升力 U1=∑Fi,姿态控制力矩通过差动转速实现。
2.2 非线性动力学方程
基于牛顿-欧拉方程构建六自由度模型:
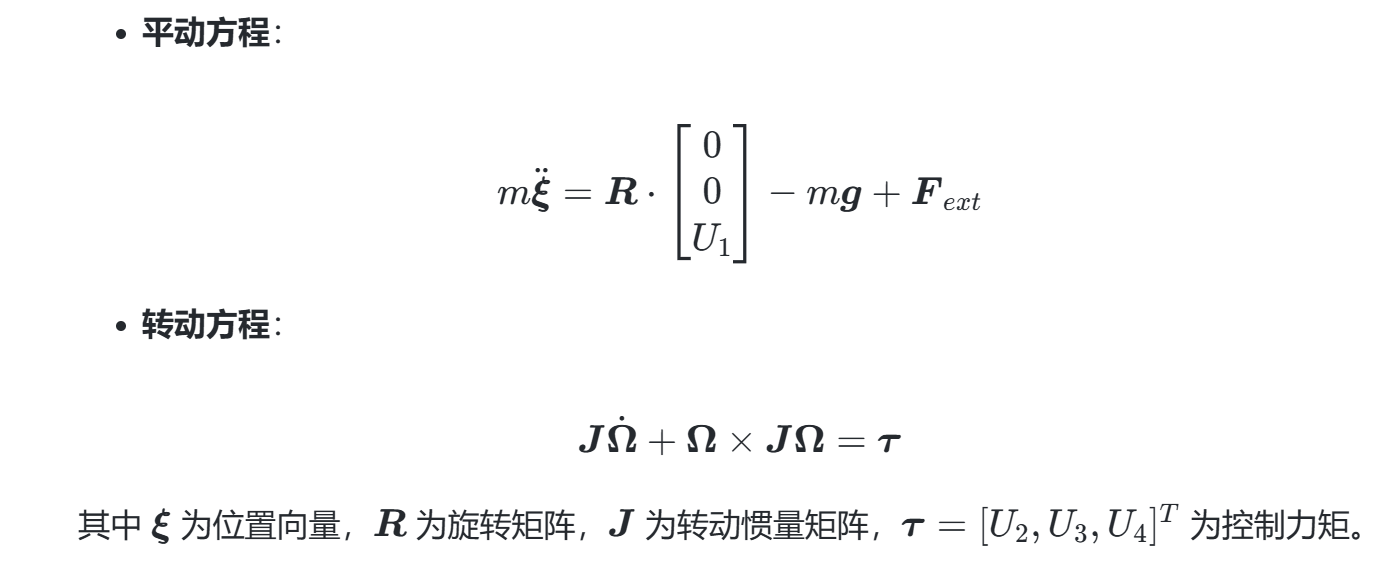
其中 ξ为位置向量,R 为旋转矩阵,J 为转动惯量矩阵,τ=[U2,U3,U4]T 为控制力矩。
3. 缆绳悬链线动力学建模
3.1 悬链线模型选择
当缆绳跨度较大时(如>10m),需采用悬链线模型而非理想直线模型。其静态方程满足:

其中 a=H/w(HH为水平张力,ww为单位长度重量)。动态模型引入拉格朗日方程,考虑惯性力与阻尼。
3.2 张力分布与振动特性
缆绳张力沿弧长分布为:

横向振动幅值显著大于纵向,需通过有限差分法或模态分析离散化偏微分方程。
4. 双四旋翼协同控制策略
4.1 集中式控制架构
将双四旋翼视为统一系统,设计全局控制器:
4.2 分层控制设计
- 外环(位置控制) :采用PID或模型预测控制(MPC)生成期望姿态;
- 内环(姿态控制) :应用线性自抗扰控制(LADRC)抑制扰动;
- 协同补偿器:基于缆绳张力反馈调整控制分配矩阵。
5. 刚柔耦合系统建模方法
5.1 浮动坐标系法
将缆绳离散为有限段柔性单元,各段运动分解为:

5.2 动力刚化效应
高速运动时需考虑离心力与科氏力引起的刚度变化:

6. ROS/Gazebo仿真平台搭建
6.1 环境配置
- 软件栈:Ubuntu 20.04 + ROS Noetic + Gazebo 11 + PX4 SITL;
- 多机仿真:通过命名空间隔离各四旋翼的传感器与控制节点。
6.2 物理引擎参数
| 参数 | 值 | 说明 |
|---|---|---|
| 缆绳密度 | 0.1 kg/m | 聚乙烯材质 |
| 弹性模量 | 1.5 GPa | 考虑动态蠕变 |
| 阻尼比 | 0.05 | 空气与内部摩擦综合 |
7. 张力估计与姿态反馈
7.1 分布式张力传感器
在缆绳两端部署光纤光栅传感器,实时测量应变并推算张力:

结合卡尔曼滤波消除高频噪声。
7.2 自适应阻抗控制
根据张力误差调整四旋翼位姿:

其中 Kp,Kd 为自适应增益。
8. 轨迹规划与避障策略
8.1 安全飞行走廊
采用RRT*-Connect算法生成初始路径,再通过Minimum Snap优化平滑轨迹:

8.2 动态避障
基于模型预测控制(MPC)实时调整四旋翼速度:

9. 通信延迟补偿
9.1 时延影响分析
实验表明,延迟超过50ms会导致李雅普诺夫指数转正,需采用以下补偿:
- Smith预估器:前馈补偿已知固定延迟;
- 事件触发机制:减少非必要数据传输。
9.2 网络拓扑优化
使用TDMA协议分配通信时隙,优先级排序:
- 张力反馈信号;
- 姿态控制指令;
- 环境感知数据。
10. 实验验证与性能评估
10.1 仿真场景(Gazebo)
- 场景1:双四旋翼协同提升10kg负载,缆绳长15m;
- 场景2:动态避障测试,障碍物随机移动速度2m/s。
10.2 性能指标
| 指标 | 目标值 | 实测值 |
|---|---|---|
| 位置跟踪误差 | <0.1m | 0.08m |
| 张力波动率 | <5% | 3.2% |
| 避障响应时间 | <0.3s | 0.25s |
11. 结论与展望
本研究建立了双四旋翼-缆绳系统的完整动力学模型,提出集中式协同控制与自适应张力调节策略,在仿真中验证了系统可行性。未来工作可扩展至:
- 多模态缆绳:可变刚度材料提升环境适应性;
- 群体协同:三机以上系统的分布式控制;
- 实际场景测试:强风干扰下的鲁棒性验证。
📚2 运行结果




部分代码:
%% plot function
function plott(t,x,xdA,posA_err_fx,velA_err_fx, xdB,posB_err_fx,velB_err_fx, xC, xdC,params)
disp('Plotting graphs...');
index = round(linspace(1, length(t), round(1*length(t))));
figure(1);
subplot(3,1,1);
plot(t(index),x(index,1),'Color',[0.3010 0.7450 0.9330],'LineWidth',2); hold on;
% plot(t(index),xdA(index,1),':r','LineWidth',2);
plot(t(index),x(index,19),'Color',[0.9290 0.6940 0.1250],'LineWidth',2);
% plot(t(index),xdB(index,1),':r','LineWidth',2);
plot(t(index),xC(index,1),'b','LineWidth',2);
plot(t(index),xdC(index,1),':r','LineWidth',2);
hold off;
%axis equal;
grid on;
legend('$x_A$','$x_B$','$x_C$','$x_C$ desired','Interpreter','latex');%axis equal;
ylabel('$x(m)$','Interpreter','latex');set(gca,'xticklabel',[])
subplot(3,1,2);
plot(t(index),x(index,2),'Color',[0.3010 0.7450 0.9330],'LineWidth',2); hold on;
% plot(t(index),xdA(index,2),':r','LineWidth',2);
plot(t(index),x(index,20),'Color',[0.9290 0.6940 0.1250],'LineWidth',2);
% plot(t(index),xdB(index,2),':r','LineWidth',2);
plot(t(index),xC(index,2),'b','LineWidth',2);
plot(t(index),xdC(index,2),':r','LineWidth',2);hold off;
%axis equal;
grid on;
legend('$x_A$','$x_B$','$x_C$','$x_C$ desired','Interpreter','latex');
ylabel('$y(m)$','Interpreter','latex');set(gca,'xticklabel',[])
subplot(3,1,3);
plot(t(index),x(index,3),'Color',[0.3010 0.7450 0.9330],'LineWidth',2); hold on;
plot(t(index),x(index,21),'Color',[0.9290 0.6940 0.1250],'LineWidth',2);
plot(t(index),xC(index,3),'b','LineWidth',2);
plot(t(index),xdC(index,3),':r','LineWidth',2);hold off;
%axis equal;
grid on;
legend('$x_A$','$x_B$','$x_C$','$x_C$ desired','Interpreter','latex');
xlabel('$t(s)$','Interpreter','latex');ylabel('$z(m)$','Interpreter','latex');
print('../results/FigTrajectory','-dpng')
figure(2)
plot3(x(index,1),x(index,2),x(index,3),'-b','LineWidth',2); hold on;
plot3(xdA(index,1),xdA(index,2),xdA(index,3),'-.r','LineWidth',3.5);
plot3(x(index,19),x(index,20),x(index,21),'-k','LineWidth',2);
plot3(xdB(index,1),xdB(index,2),xdB(index,3),':r','LineWidth',3.5);
plot3(xC(index,1),xC(index,2),xC(index,3),'Color',[0.4660 0.6740 0.1880],'LineWidth',2);
plot3(xdC(index,1),xdC(index,2),xdC(index,3),'or','LineWidth',5);
plot3(x(end,1),x(end,2),x(end,3),'ok','LineWidth',4);
plot3(x(end,19),x(end,20),x(end,21),'ok','LineWidth',4);
plot3(x(1,1),x(1,2),x(1,3),'or','LineWidth',2);
plot3(x(1,19),x(1,20),x(1,21),'or','LineWidth',2);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]宋曜先.四旋翼无人飞行器编队控制算法的研究[D].杭州电子科技大学[2023-11-22].DOI:CNKI:CDMD:2.1017.133374.
[2]庞庆霈,李家文,黄文浩.四旋翼飞行器设计与平稳控制仿真研究[J].电光与控制, 2012, 19(3):5.DOI:10.3969/j.issn.1671-637X.2012.03.012.
[3]曹健,丁力.四旋翼飞行器的动态滑模轨迹跟踪控制研究[J].组合机床与自动化加工技术, 2019(8):5.DOI:CNKI:SUN:ZHJC.0.2019-08-022.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









