






一、作业1
(1)编写UART_2串口发送程序时,初始化需要设置哪些参数?
- UART寄存器相关地址
- GPIOA和UART2时钟使能
- 将GPIO端口设置为复用功能
- 选择引脚的端口复用功能
- 暂时禁用UART功能
- 暂时关闭串口发送与接收功能
- 配置波特率
- 初始化控制寄存器和中断状态寄存器、清标志位
- 启动串口发送与接收功能
- 开启UART功能
- 使能模块中断
(2)假设速度为115200,系统时钟为72MHz,波特率寄存器BRR中的值应该是多少?
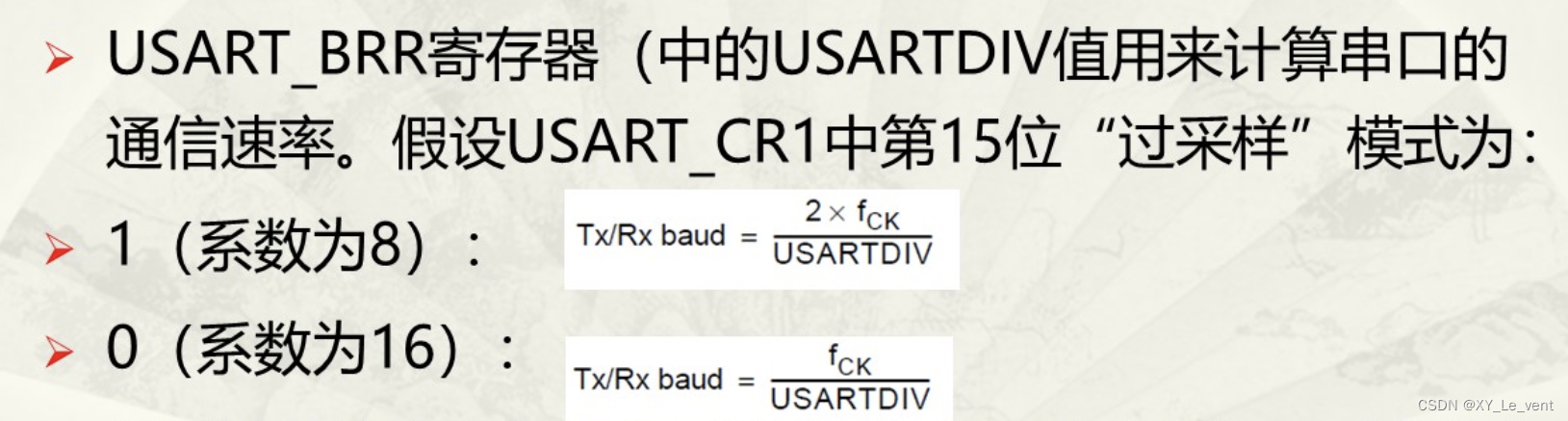
根据公式可得:
若USART_CR1的第15位为0,则为72MHz / 115200=625;
若USART_CR1的第15位为1,则为2*72MHz / 115200=1250;
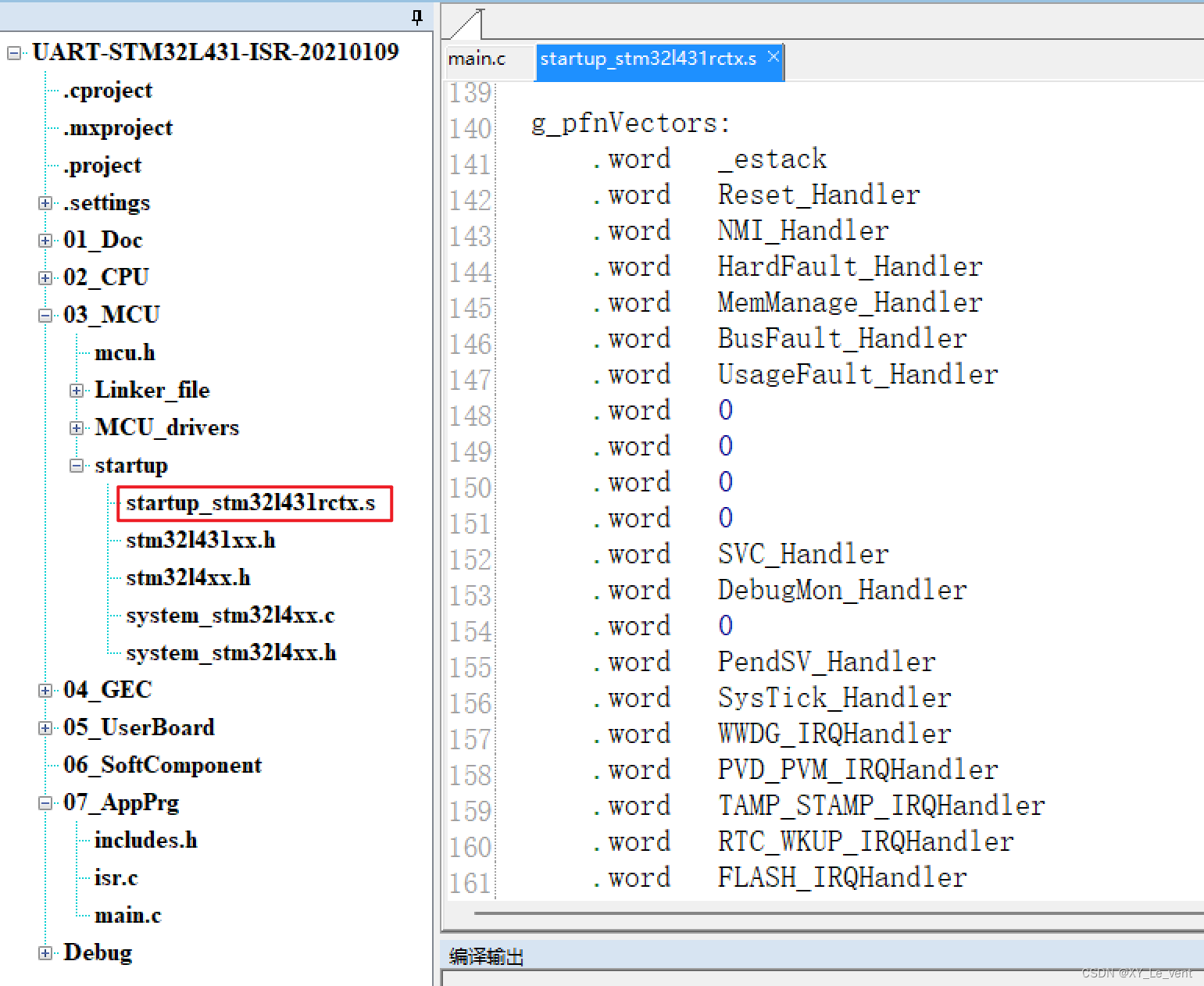
(3)中断向量表在哪个文件中?表中有多少项?给出部分截图。
中断向量表在03_MCU/startup/start_stm32l431rctx.s,表中一共有99个中断项,前16个为内核中断,其余的为非内核中断。
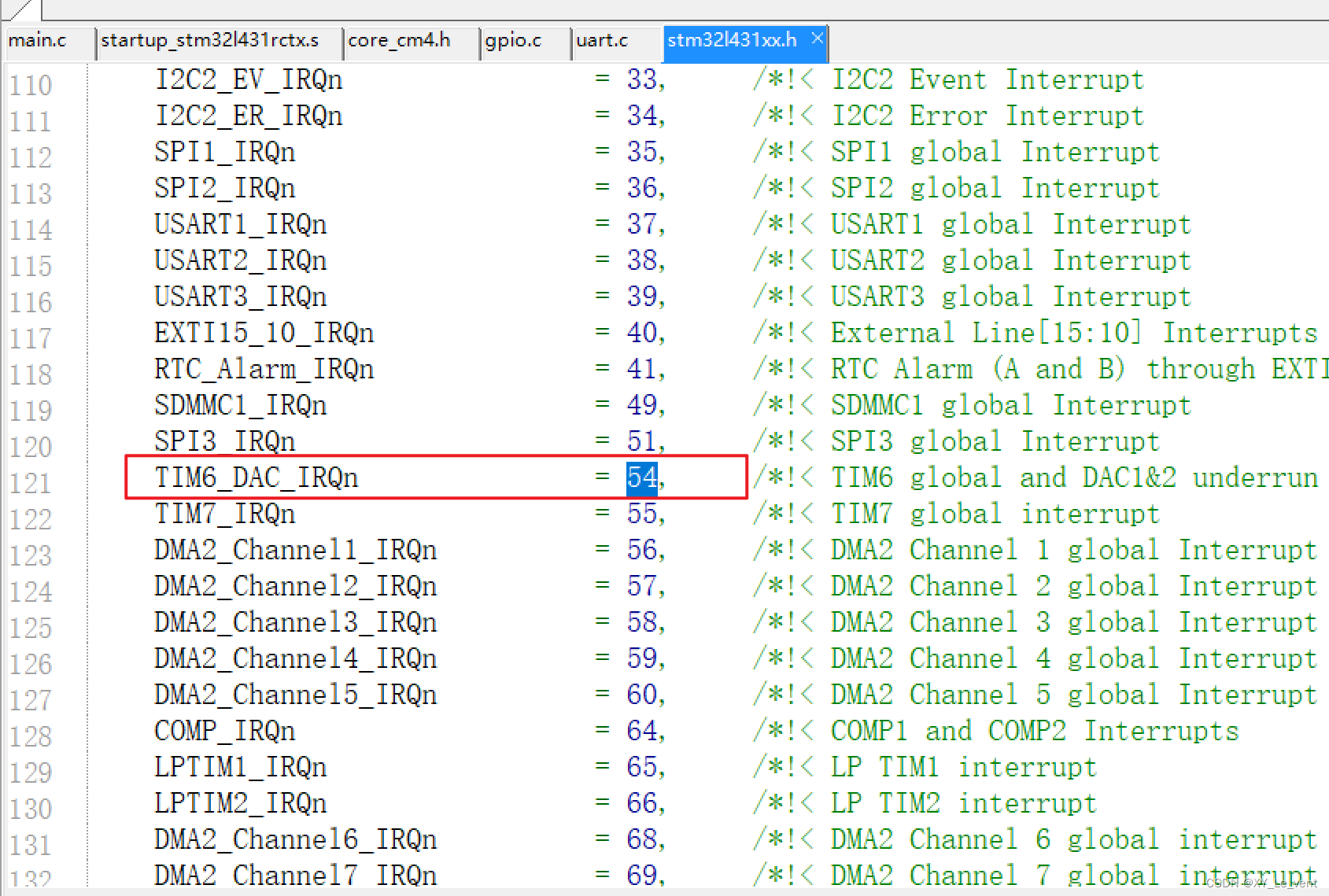
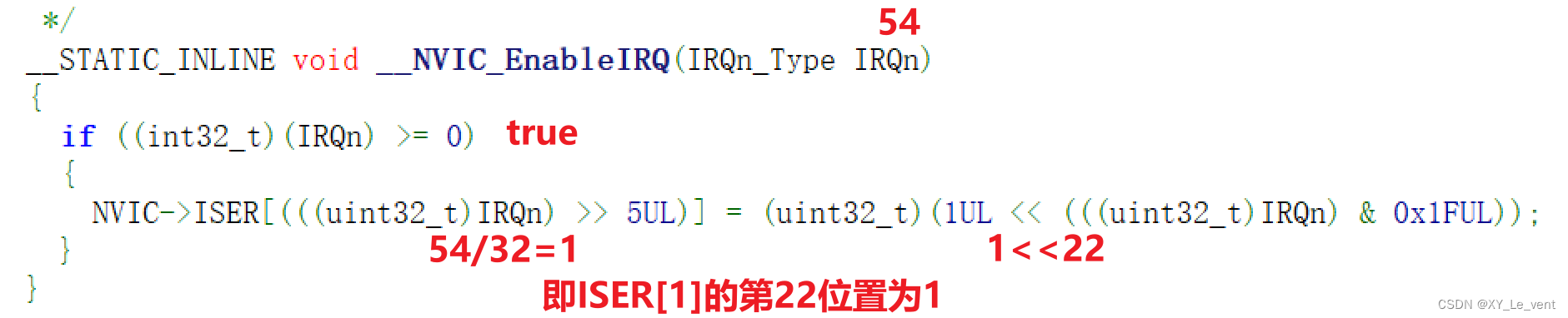
(4)以下是中断源使能函数,假设中断源为TIM6,将函数实例化(写出各项具体数值)。

首先中断源使能函数需要传入中断请求号,在stm32l431xx.h可以查到TIM6的中断请求号为54。
接下来在中断源使能函数内判断IRQ号是否是非内核中断,如果是的话就设置相应的中断使能寄存器中的位数为1。
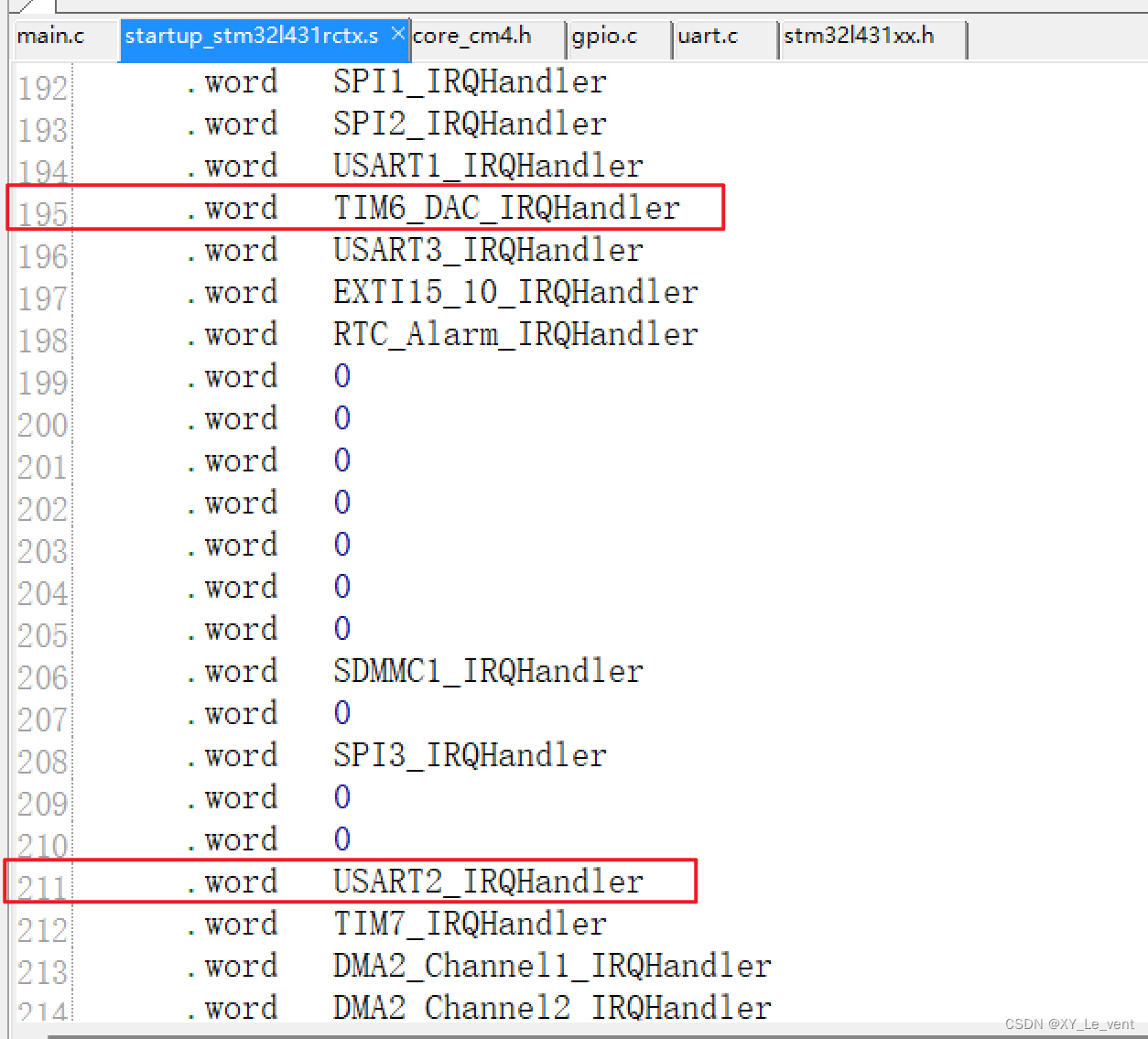
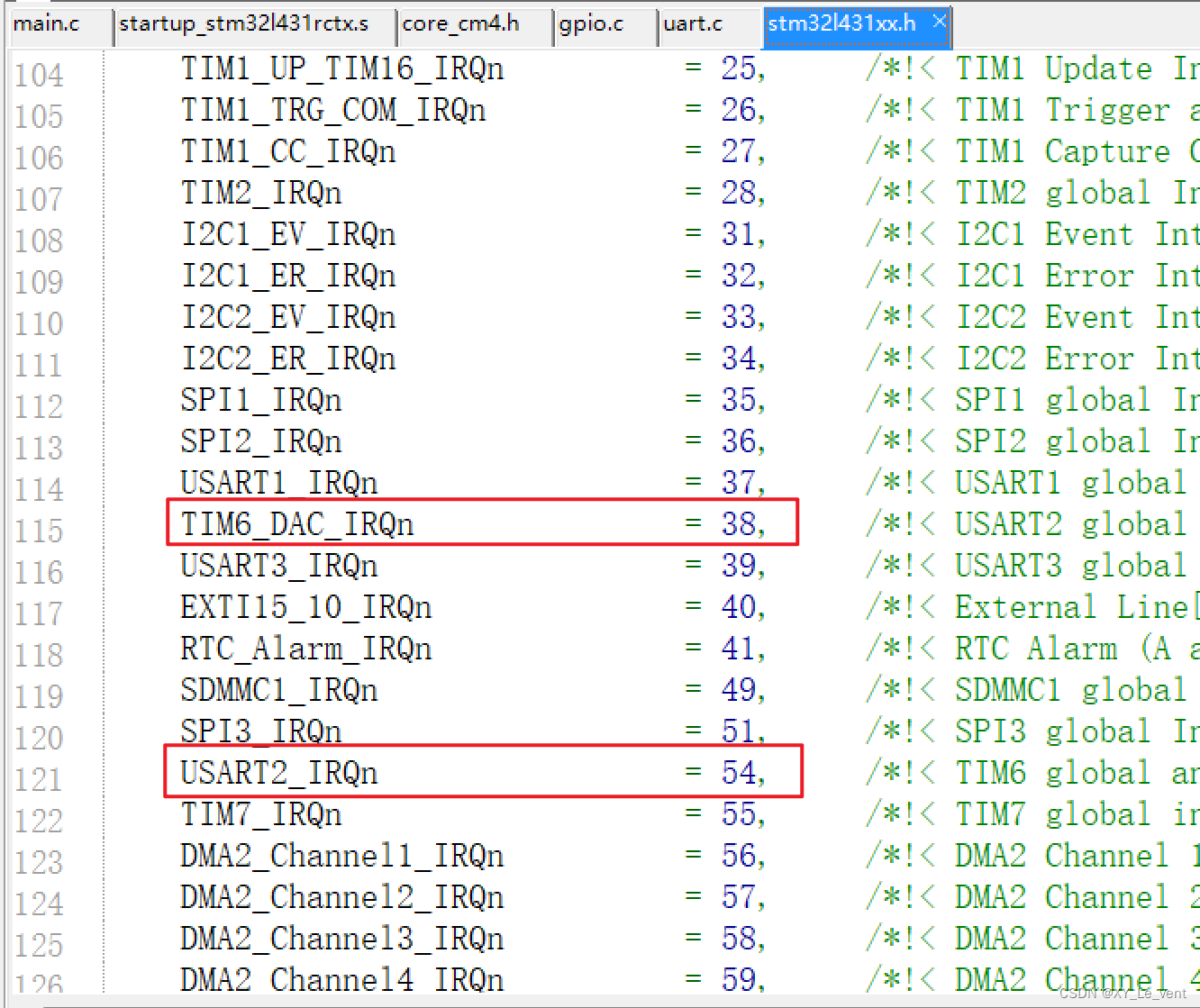
(5)假设将UART_2和TIM6交换其在中断向量表中的位置和IRQ号,UART_2可以正常中断吗?
交换UART_2和TIM6在中断向量表中的位置和IRQ号后:
编译并运行工程
可以看到此时并没有执行UART_2的中断处理程序。在系统中,IRQ号用于唯一标识每个外设的中断请求,在中断处理过程中,当一个外设产生中断请求时,处理器会根据中断向量表中的对应项跳转到相应的中断处理程序中去执行。
由于UART_2和TIM6在中断向量表中的位置和IRQ号互换了,此时处理器将会去执行TIM6的中断处理程序,而不是UART_2的中断处理程序,导致UART_2的中断无法正常处理。
因此,中断向量表不可随意更改。
二、作业2
(1)调用构件方式实现
main.c
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
//主函数
int main(void)
{
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
//(1.5)用户外设模块初始化
gpio_init(LIGHT_BLUE,GPIO_OUTPUT,LIGHT_OFF); //初始化蓝灯
gpio_init(LIGHT_RED,GPIO_OUTPUT,LIGHT_OFF); //初始化红灯
gpio_init(LIGHT_GREEN,GPIO_OUTPUT,LIGHT_OFF); //初始化绿灯
uart_init(UART_User,115200); //初始化串口模块
//(1.6)使能模块中断
uart_enable_re_int(UART_User); //使能UART_USER模块接收中断功能
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
printf("--------广州大学----------\n");
printf("--网络211 32106200026 GXY-\n");
printf("--------嵌入式作业5-------\n");
} isr.c
#include "includes.h"
//UART_User串口收到一个字节触发
void UART_User_Handler(void)
{
//【1】声明局部变量
uint8_t ch;
uint8_t flag;
//【2】关总中断
DISABLE_INTERRUPTS;
//【3】读取接到的一个字节
ch=uart_re1(UART_User,&flag); //调用接收一个字节的函数,清接收中断位
//【4】根据flag判断是否真正收到一个字节的数据
if(flag) //有数据
{
if (ch=='R') //判断灯的状态标志
{
gpio_set(LIGHT_RED,LIGHT_ON); //红灯亮
gpio_set(LIGHT_GREEN,LIGHT_OFF);
gpio_set(LIGHT_BLUE,LIGHT_OFF);
}
else if(ch=='G')
{
gpio_set(LIGHT_RED,LIGHT_OFF);
gpio_set(LIGHT_GREEN,LIGHT_ON); //绿灯亮
gpio_set(LIGHT_BLUE,LIGHT_OFF);
}
else if(ch=='B')
{
gpio_set(LIGHT_RED,LIGHT_OFF);
gpio_set(LIGHT_GREEN,LIGHT_OFF);
gpio_set(LIGHT_BLUE,LIGHT_ON); //蓝灯亮
}
else
{
gpio_set(LIGHT_BLUE,LIGHT_OFF);
gpio_set(LIGHT_RED,LIGHT_OFF);
gpio_set(LIGHT_GREEN,LIGHT_OFF);
}
ch+=1;
uart_send1(UART_User,ch); //回发接收到的字节
}
//【5】开总中断
ENABLE_INTERRUPTS;
}结果:
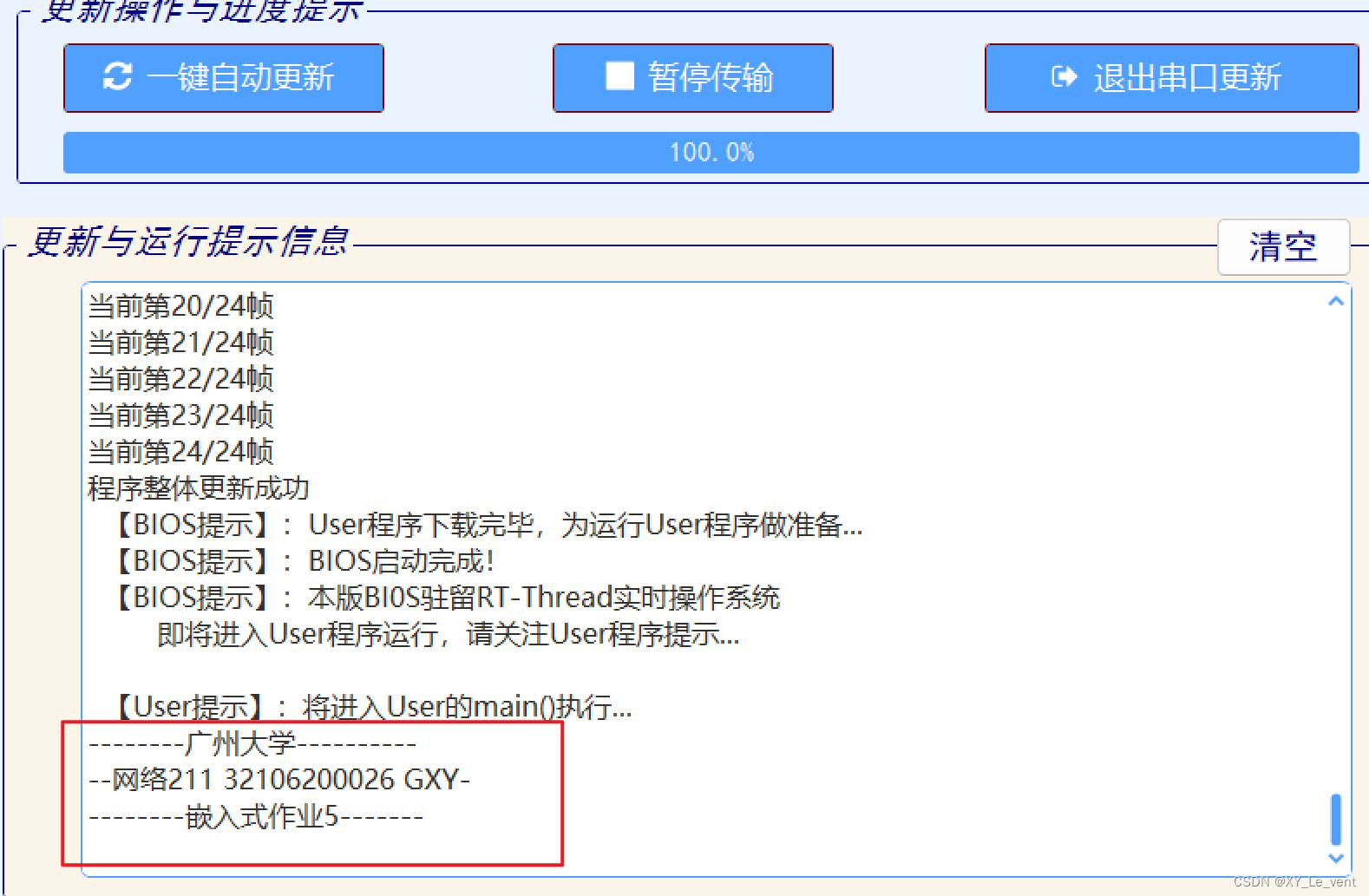
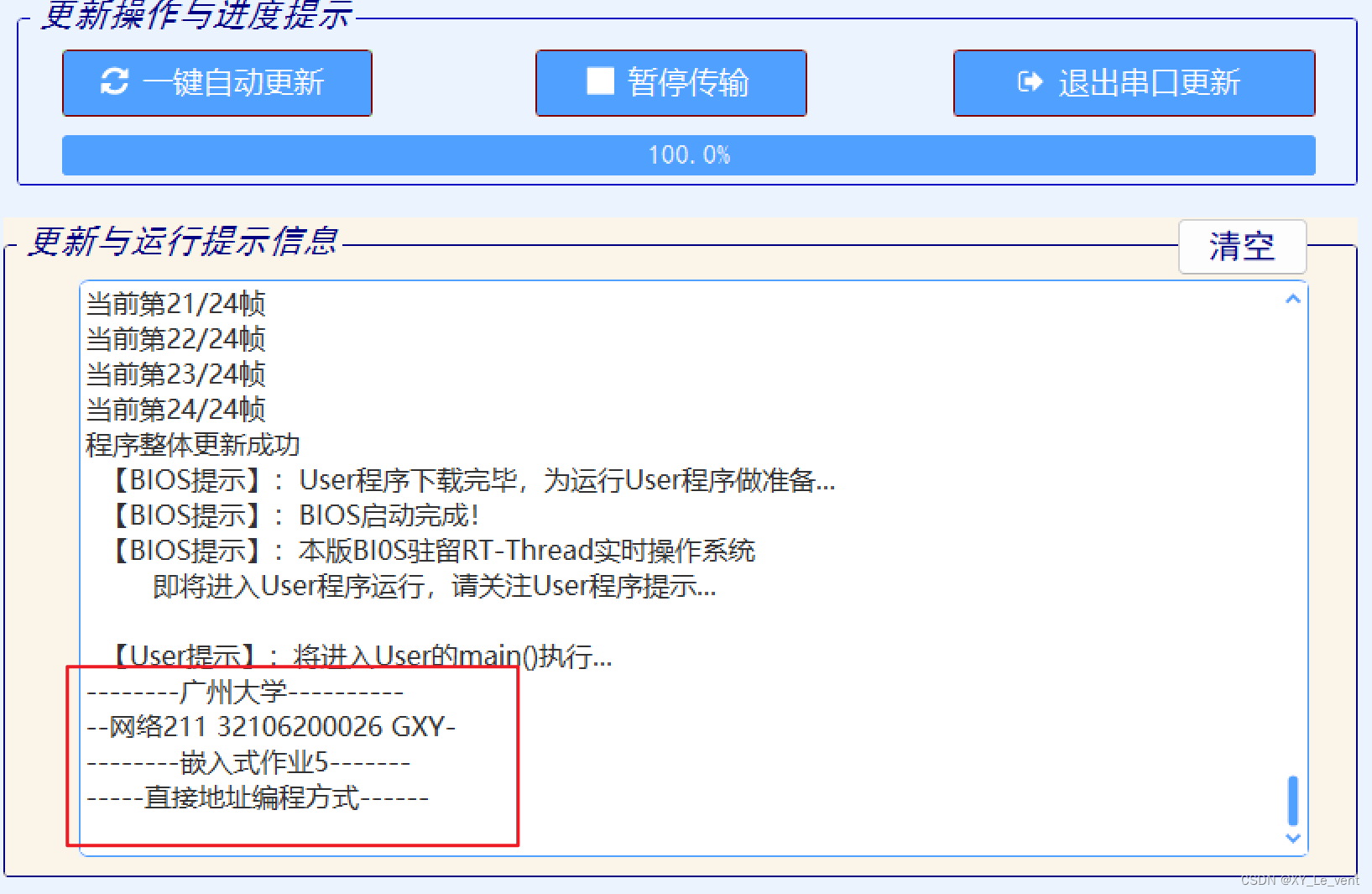
编译完成后更新工程

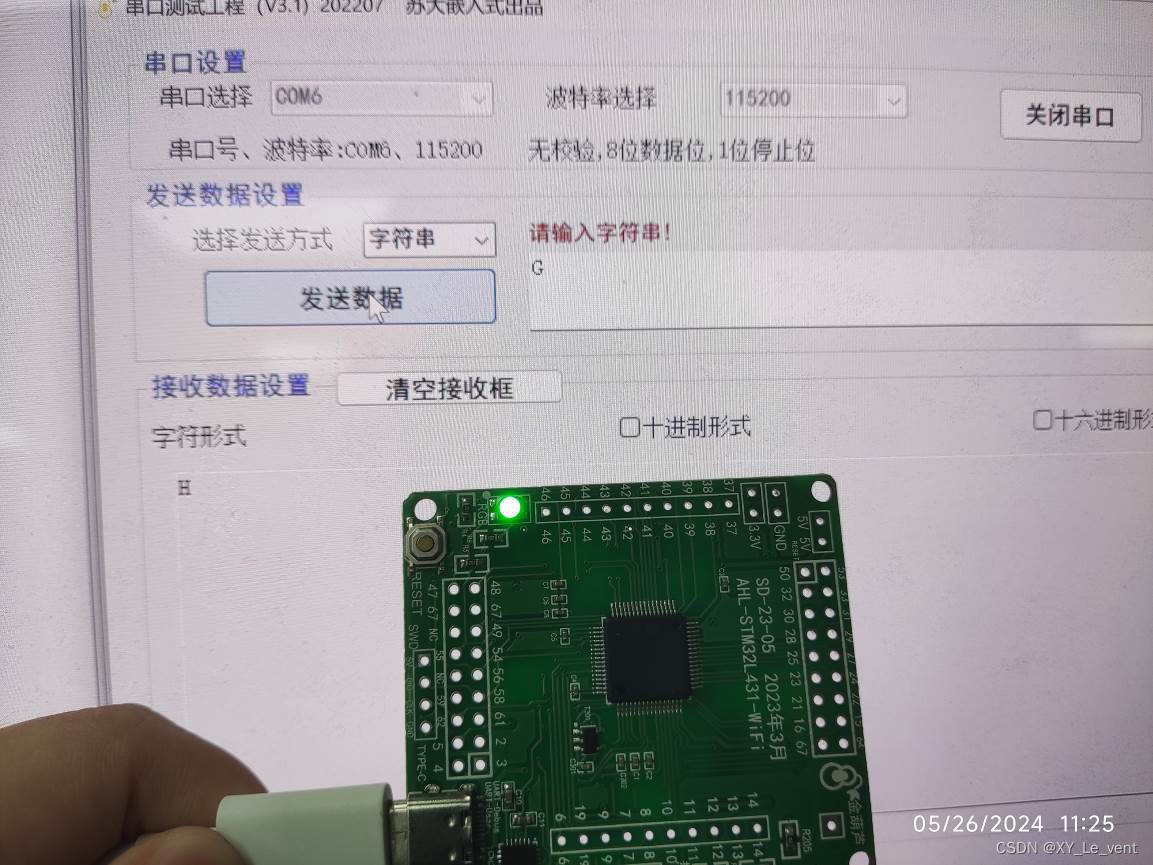
可以看到输入B后成功点亮了蓝灯,并且输出了该字符的下一个字符C
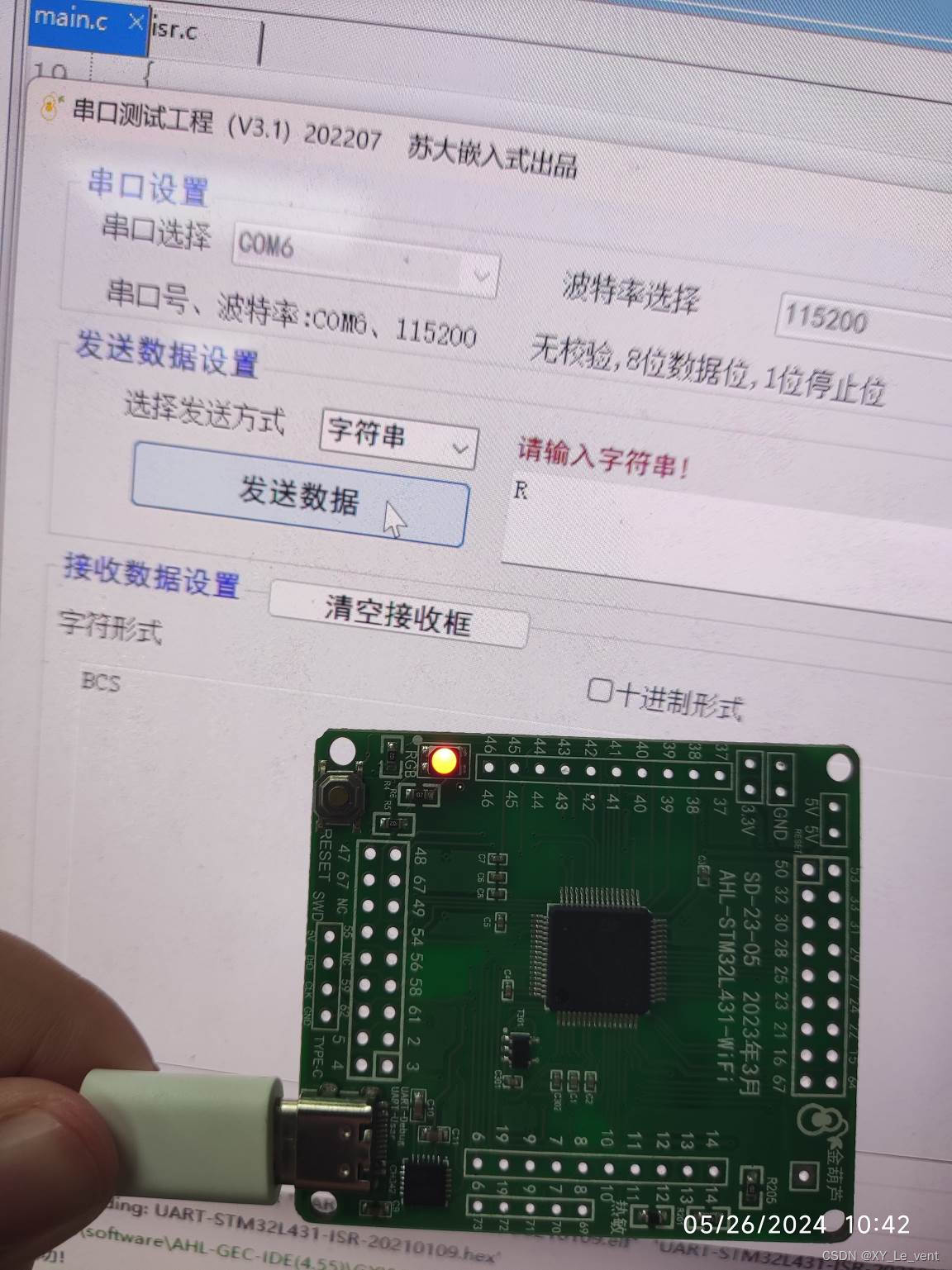
可以输入R成功点亮了红灯,并且输出了下一个字符S
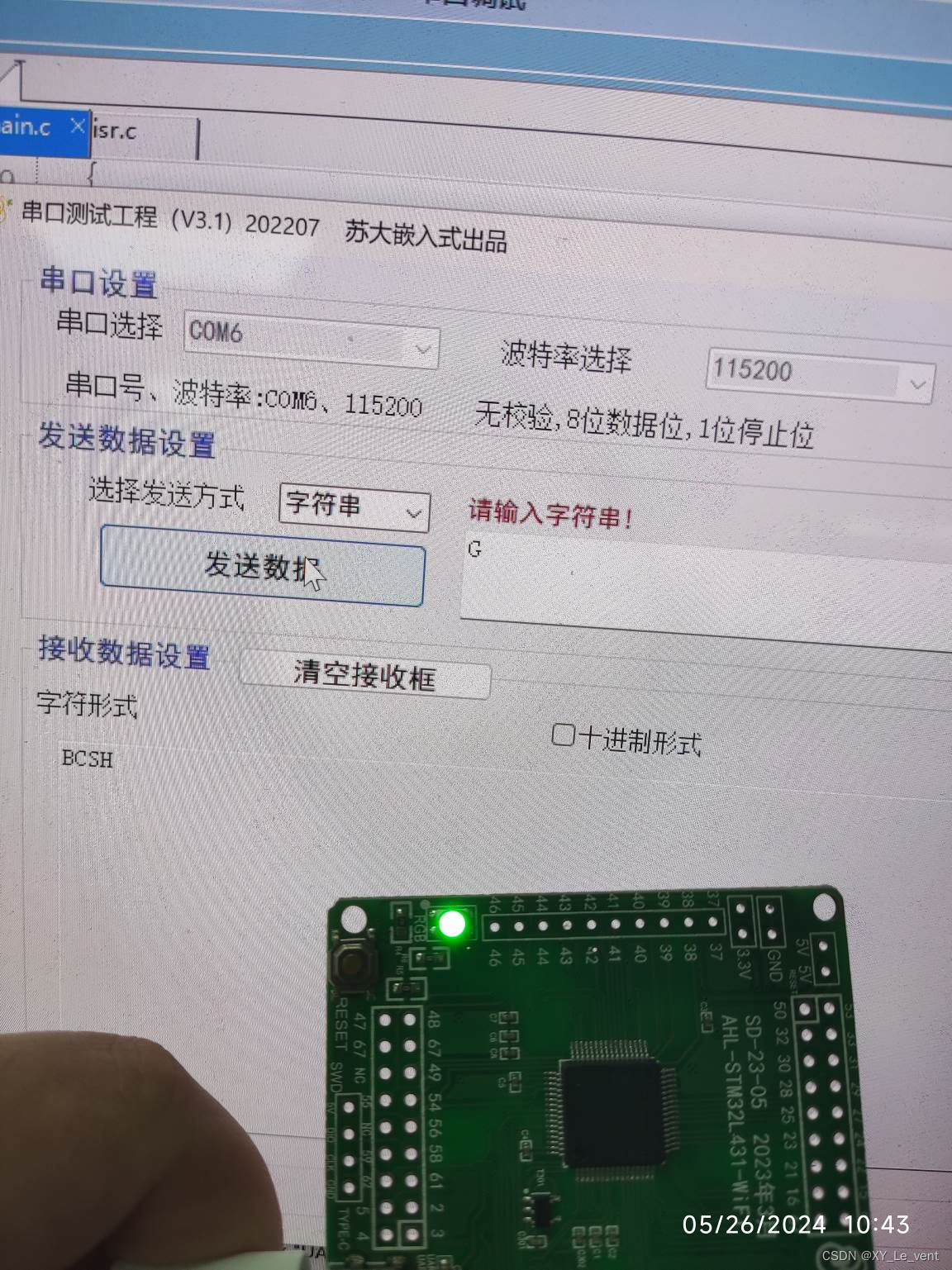
可以看到输入G成功点亮了绿灯,并且输出了下一个字符H

可以看到在输出除了RGB三个字符外,其余字符都不会点亮灯,但是还会成功输出该字符对应的下一个字符。
(2)直接地址编程实现
main.c
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
int main(void)
{
//uart寄存器相关地址
volatile uint32_t* RCC_AHB2; //GPIO的A口时钟使能寄存器地址
volatile uint32_t* RCC_APB1; //UART的2口时钟使能寄存器地址
volatile uint32_t* gpio_ptr; //GPIO的A口基地址
volatile uint32_t* uart_ptr; //uart2端口的基地址
volatile uint32_t* gpio_mode; //引脚模式寄存器地址=口基地址
volatile uint32_t* gpio_afrl; //GPIO复用功能低位寄存器
volatile uint32_t* uart_brr; //UART波特率寄存器地址
volatile uint32_t* uart_isr; // UART中断和状态寄存器基地址
volatile uint32_t* uart_cr1; //UART控制寄存器1基地址
volatile uint32_t* uart_cr2; // UART控制寄存器2基地址
volatile uint32_t* uart_cr3; // UART控制寄存器3基地址
volatile uint32_t* uart_tdr; // UART发送数据寄存器
uint16_t usartdiv; //BRR寄存器应赋的值
//变量赋值
RCC_APB1=0x40021058UL; //UART时钟使能寄存器地址
RCC_AHB2=0x4002104CUL; //GPIO的A口时钟使能寄存器地址
gpio_ptr=0x48000000UL; //GPIOA端口的基地址
uart_ptr=0x40004400UL; //UART2端口的基地址
gpio_mode=0x48000000UL; //引脚模式寄存器地址=口基地址
gpio_afrl=0x48000020UL; // GPIO复用功能低位寄存器
uart_cr1=0x40004400UL; //UART控制寄存器1基地址
uart_brr=0x4000440CUL; // UART波特率寄存器地址
uart_isr=0x4000441CUL; // UART中断和状态寄存器基地址
uart_tdr=0x40004428UL; //UART发送数据寄存器
uart_cr2=0x40004404UL; // UART控制寄存器2基地址
uart_cr3=0x40004408UL; //UART控制寄存器3基地址
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
//(1.5)用户外设模块初始化
gpio_init(LIGHT_BLUE,GPIO_OUTPUT,LIGHT_OFF); //初始化蓝灯
gpio_init(LIGHT_RED,GPIO_OUTPUT,LIGHT_OFF); //初始化红灯
gpio_init(LIGHT_GREEN,GPIO_OUTPUT,LIGHT_OFF); //初始化绿灯
//uart_init(UART_User,115200);
//使能GPIOA和UART2的时钟
*RCC_APB1|=(0x1UL<<17U); //UART2时钟使能
*RCC_AHB2 |=(0x1UL<<0U); //GPIOA时钟使能
//将GPIO端口设置为复用功能
//首先将D7、D6、D5、D4清零
*gpio_mode &= ~((0x3UL<<4U)|(0x3UL<<6U));
//然后将D7、D6、D5、D4设为1010,设置PTA2、PTA3为复用功能串行功能。
*gpio_mode |=((0x2UL<<4U)|(0x2UL<<6U));
//选择引脚的端口复用功能
//首先将D15~D8清零
*gpio_afrl &= ~((0xFUL<<8U)|(0xFUL<<12U));
//然后将D15~D8设置为01110111,分别将PTA3、PTA2引脚设置为USART2_RX、USART2_TX
*gpio_afrl=(((0x1UL<<8U)|(0x2UL<<8U)|(0x4UL<<8U))|((0x1UL<<12U)
|(0x2UL<<12U)|(0x4UL<<12U)));
//暂时禁用UART功能,控制寄存器1的第0位对应的是UE—USART使能位。
//此位清零后,USART预分频器和输出将立即停止,并丢弃所有当前操作。
*uart_cr1 &= ~(0x1UL);
//暂时关闭串口发送与接收功能,控制寄存器1的发送器使能位(D3)、接收器使能位(D2)
*uart_cr1 &= ~((0x1UL<<3U)|(0x1UL<<2U));
//配置波特率
if(*uart_cr1&(0x1UL<<15) == (0x1UL<<15))
usartdiv = (uint16_t)((SystemCoreClock/115200)*2);
else
usartdiv = (uint16_t)((SystemCoreClock/115200));
*uart_brr = usartdiv;
//初始化控制寄存器和中断状态寄存器、清标志位
//关中断
*uart_isr = 0x0UL;
//将控制寄存器2的两个使能位清零。D14—LIN模式使能位、D11—时钟使能位
*uart_cr2 &= ~((0x1UL<<14U)|(0x1UL<<11U));
//将控制寄存器3的三个使能位清零。D5 (SCEN) —smartcard模式使能位、
//D3 (HDSEL) —半双工选择位、D1 (IREN) —IrDA 模式使能位
*uart_cr3 &= ~((0x1UL<<5U) | (0x1UL<<3U) |(0x1UL<<1U));
//启动串口发送与接收功能
*uart_cr1 |= ((0x1UL<<3U)|(0x1UL<<2U));
//开启UART功能
*uart_cr1 |= (0x1UL<<0U);
//(1.6)使能模块中断
uart_enable_re_int(UART_User); //使能UART_User模块接收中断功能
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
printf("--------广州大学----------\n");
printf("--网络211 32106200026 GXY-\n");
printf("--------嵌入式作业5-------\n");
printf("-----直接地址编程方式------\n");
}isr.c
#include "includes.h"
void User_SysFun(uint8_t ch);
void USART2_IRQHandler(void)
{
uint8_t ch;
uint8_t flag;
//寄存器相关地址
volatile uint32_t* uart_isr;
volatile uint32_t* uart_rdr;
volatile uint32_t* uart_tdr;
flag = 0;
uart_isr=0x4000441CUL;
uart_rdr=0x40004424UL;
uart_tdr=0x40004428UL;
DISABLE_INTERRUPTS; //关总中断
//接收一个字节的数据
for (volatile uint32_t t = 0; t < 0xFBBB; t++)//查询指定次数
{
//判断接收缓冲区是否满
if (*uart_isr & (0x1UL<<5UL))
{
ch=*uart_rdr; //获取数据,清接收中断位
flag = 1; //接收成功
break;
}
}
if(flag) //有数据
{
if (ch=='R') //判断灯的状态标志
{
gpio_set(LIGHT_RED,LIGHT_ON); //红灯亮
gpio_set(LIGHT_GREEN,LIGHT_OFF);
gpio_set(LIGHT_BLUE,LIGHT_OFF);
}
else if(ch=='G')
{
gpio_set(LIGHT_RED,LIGHT_OFF);
gpio_set(LIGHT_GREEN,LIGHT_ON); //绿灯亮
gpio_set(LIGHT_BLUE,LIGHT_OFF);
}
else if(ch=='B')
{
gpio_set(LIGHT_RED,LIGHT_OFF);
gpio_set(LIGHT_GREEN,LIGHT_OFF);
gpio_set(LIGHT_BLUE,LIGHT_ON); //蓝灯亮
}
else
{
gpio_set(LIGHT_BLUE,LIGHT_OFF);
gpio_set(LIGHT_RED,LIGHT_OFF);
gpio_set(LIGHT_GREEN,LIGHT_OFF);
}
ch+=1;
//发送缓冲区为空则发送数据
for (volatile uint32_t t = 0; t < 0xFBBB; t++)
{
if (*uart_isr & (0x1UL<<7UL))
{
*uart_tdr = ch;
break;
}
}
}
ENABLE_INTERRUPTS; //开总中断
}
//内部函数
void User_SysFun(uint8_t ch)
{
//(1)收到的一个字节参与组帧
if(gcRecvLen == 0) gcRecvLen =useremuart_frame(ch,(uint8_t*)gcRecvBuf);
//(2)字节进入组帧后,判断gcRecvLen=0?若为0,表示组帧尚未完成,
// 下次收到一个字节,再继续组帧
if(gcRecvLen == 0) goto User_SysFun_Exit;
//(3)至此,gcRecvLen≠0,表示组帧完成,gcRecvLen为帧的长度,校验序列号后(与
// 根据Flash中倒数一扇区开始的16字节进行比较)
// gcRecvBuf[16]进行跳转
if(strncmp((char *)(gcRecvBuf),(char *)((MCU_SECTOR_NUM-1)*MCU_SECTORSIZE+
MCU_FLASH_ADDR_START),16) != 0)
{
gcRecvLen = 0; //恢复接收状态
goto User_SysFun_Exit;
}
//(4)至此,不仅收到完整帧,且序号比较也一致, 根据命令字节gcRecvBuf[16]进行跳转
//若为User串口程序更新命令,则进行程序更新
switch(gcRecvBuf[16]) //帧标识
{
case 0:
SYSTEM_FUNCTION((uint8_t *)(gcRecvBuf+17));
gcRecvLen = 0; //恢复接收状态
break;
default:
break;
}
User_SysFun_Exit:
return;
}结果:
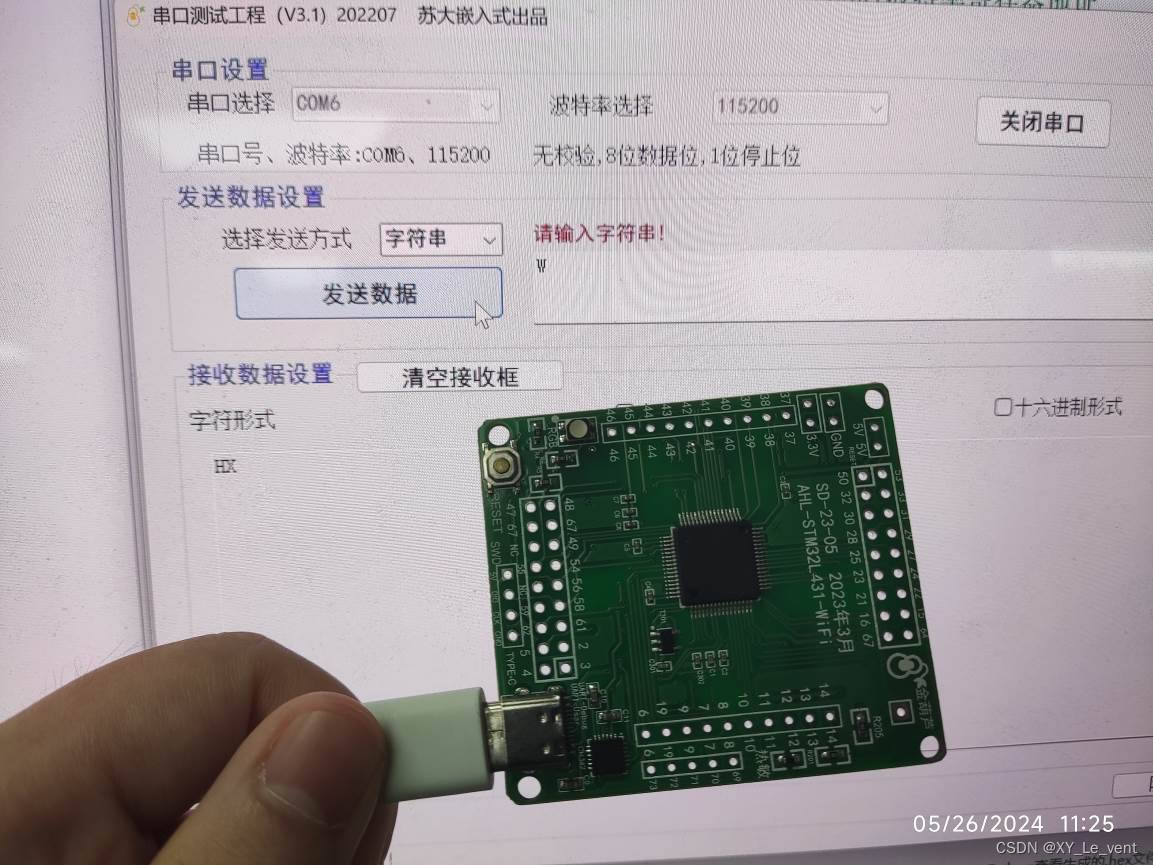


可以看到和直接调用构件实现的结果一样,成功点亮了对应颜色的灯,并且会送了对应的下一个字符。

















 779
779

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









