







一、工业巡检的内涵与核心价值
工业巡检是通过周期性检查设备运行状态、工艺参数及环境安全,确保生产系统稳定运行的预防性维护手段。其核心目标在于预防故障、保障安全、提升效率。以化工行业为例,高温高压设备的温度、压力监测,管道密封性检查,以及电气系统的接地状态评估,均是巡检的关键内容。传统人工巡检依赖 “一看、二听、三摸、四嗅、五比较” 的经验判断,虽能发现显性问题,但对隐性故障(如设备内部磨损、微泄漏)的识别能力有限,且存在效率低、误判率高、数据追溯难等缺陷。
二、传统巡检方式的局限性
- 效率与成本矛盾:人工巡检需耗费大量人力,尤其在大型厂区或复杂环境中,巡检周期长、覆盖面不足。例如,某石化企业曾因人工漏检导致管道腐蚀泄漏,造成生产中断及环保风险。
- 数据记录滞后:纸质记录易丢失、难分析,无法形成系统性维护依据。某制造企业统计显示,传统巡检模式下设备故障率高达 25%,紧急维修成本占维护总支出的 40%。
- 安全风险突出:高危场景(如辐射区、有毒气体环境)的人工巡检可能威胁人员安全。
三、智能化巡检技术的突破与应用
1. 物联网与标识解析技术
通过为设备赋予唯一 “数字身份证”(工业互联网标识),结合扫码签到与传感器数据采集,实现设备全生命周期管理。例如,山西省某管道企业部署智能巡检系统后,设备故障率下降 30%,维护成本降低 20%。系统实时上传设备运行参数(温度、振动、压力)及异常图片,管理人员可远程调度维修,避免人工误判。
2. 机器人化与视觉识别
工业巡检机器人搭载多传感器(如红外热像仪、气体检测仪)与英特尔酷睿处理器,可自主导航、避障并实时分析数据。例如,变电站巡检机器人通过 OpenVINO 视觉算法识别仪表读数、刀闸状态,准确率达 99%,效率是人工的 5 倍。结合深度学习模型,机器人还能区分设备表面污渍与裂纹,实现精准故障定位。
3. AI 驱动的大数据分析
基于历史数据与实时监测,AI 算法可预测设备故障概率。例如,某钢厂利用聚类分析与关联规则挖掘,将轴承故障预警提前 72 小时,减少停机损失超千万元。同时,系统自动生成巡检报告,支持趋势分析与维护决策优化。
4. AR 技术的沉浸式交互
AR 眼镜为巡检人员提供设备三维模型叠加与操作指引,辅助复杂场景下的精准检修。例如,汽车制造工厂通过 AR 导航快速定位故障点,维修效率提升 35%,操作失误率下降 60%。
四、新技术的协同效应与人工替代的必然性
- 高效性与准确性:机器人可 7×24 小时不间断作业,覆盖人工难以到达的区域(如高空、狭窄管道),且数据采集精度远超人类感官。
- 风险规避与成本优化:高危场景由机器人替代,降低人员伤亡风险;预测性维护减少非计划停机,某电力企业实施智能巡检后,年度维护成本降低 38%。
- 数据驱动的决策升级:全量数据的实时分析为设备健康管理提供科学依据,推动 “被动维修” 向 “主动预防” 转型。
五、挑战与未来趋势
尽管智能化巡检面临数据安全、初期投入成本高等挑战,但其技术成熟度与经济性正逐步提升。未来发展方向包括:
- 多模态融合:整合机器人、无人机、固定传感器的多维数据,构建全域监测网络。
- 边缘计算与 5G:本地化实时处理减少延迟,支持偏远地区设备远程运维。
- 人机协作深化:机器人承担基础巡检,人类专注复杂决策,形成高效互补模式。
结论
工业巡检的智能化转型已成为必然趋势。机器人与人工智能的结合不仅能弥补人工巡检的固有缺陷,更能通过数据驱动的精准维护提升生产安全性与经济性。随着技术迭代与成本优化,这一模式将加速普及,推动工业企业向 “少人化”“无人化” 管理迈进,为产业高质量发展注入核心动能。
案例:
焦炉车间智能巡检机器人系统设计与应用场景
一、焦炉车间环境特征与巡检需求
焦炉车间作为钢铁 / 化工行业的核心工段,具有 ** 高温(炉体表面温度达 600-1200℃)、高粉尘(PM2.5 浓度超 1000μg/m³)、强腐蚀性气体(H₂S、CO)** 等恶劣环境特征。传统人工巡检面临三大难题:
- 安全风险:炉门开闭时的高温辐射、煤气泄漏可能引发灼伤或中毒事故
- 检测盲区:炉顶、上升管等高危区域人工难以持续监测
- 数据离散:人工记录的温度、压力数据缺乏连续性,难以建立设备健康模型
二、智能巡检机器人系统架构
1. 硬件层
-
多模态感知系统:
- 双目立体视觉摄像头(可见光 + 红外热成像):支持 10-50 米距离检测,热成像精度 ±2℃
- 激光雷达 + 超声波传感器:实现自主导航与障碍物规避
- 复合气体检测仪:实时监测 CO、O₂、H₂S 浓度(精度 ±5% FS)
- 振动加速度传感器:采集设备运行频率数据(0-10kHz)
-
运动系统:
- 耐高温橡胶履带(耐温 - 40℃~+200℃)
- 六自由度机械臂(负载 5kg,定位精度 ±0.5mm)
2. 软件层
- 边缘计算模块:搭载 NVIDIA Jetson AGX Orin,实现本地实时图像处理(帧率 30fps)
- 深度学习模型:
- YOLOv8 改进版:识别炉门密封状态、上升管结焦程度(mAP@0.5:0.92)
- LSTM 预测模型:基于历史振动数据预测轴承故障(准确率 95%)
- 数字孪生系统:构建三维车间模型,实时映射机器人位置与设备状态
三、典型应用场景
1. 远距离热成像监测
- 机器人在距炉体 15 米安全距离处,通过红外热像仪扫描炉墙温度分布
- AI 算法自动识别异常热点(如局部温度骤升≥50℃),定位炉砖脱落位置
- 案例:某钢厂应用后,炉体维修周期从 3 个月延长至 6 个月
2. 高危区域自主巡检
- 机械臂搭载高清摄像头伸入上升管内部(环境温度 500℃)
- 视觉算法测量结焦厚度(精度 ±2mm),自动生成清理计划
- 作业效率提升 4 倍,人员暴露风险降低 90%
3. 多参数融合预警
- 系统融合温度、振动、气体浓度数据,通过 D-S 证据理论进行故障诊断
- 当 CO 浓度>24ppm 且对应区域温度异常时,触发三级报警机制
- 预警响应时间从人工巡检的 30 分钟缩短至 30 秒
四、人机协同交互设计
1. 增强现实辅助
- 机器人通过 5G 回传第一视角视频至中控室
- 工程师佩戴 AR 眼镜,可叠加设备三维模型与历史数据进行远程指导
2. 应急处置能力
- 搭载干粉灭火器(射程 5 米),在检测到明火时自动喷射
- 机械臂可关闭紧急切断阀(响应时间<2 秒)
3. 状态可视化
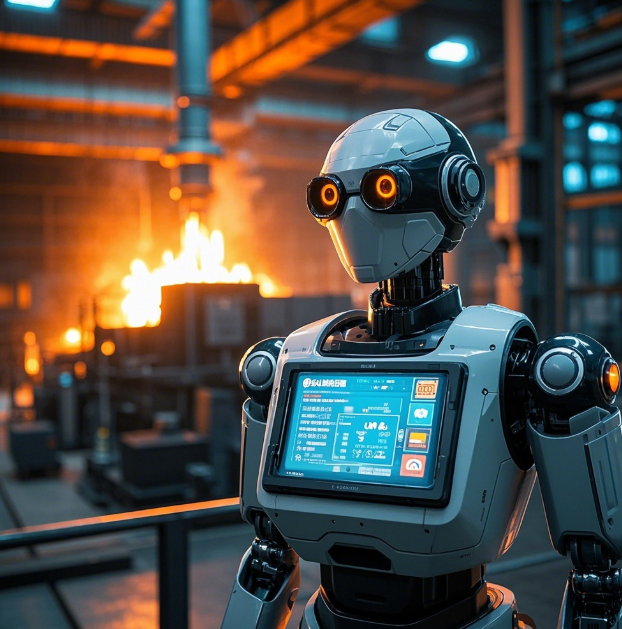
- 胸口 7 寸 LCD 屏实时显示:
- 当前位置与巡检进度
- 关键设备参数(如炭化室压力:-50~+50Pa)
- 异常警报等级(红 / 黄 / 绿三色灯指示)
五、实施成效对比
| 指标 | 人工巡检 | 机器人巡检 | 提升幅度 |
|---|---|---|---|
| 单次巡检时长 | 2.5 小时 | 45 分钟 | 70% |
| 故障漏检率 | 8.7% | 0.5% | 94% |
| 高危区域覆盖率 | 35% | 100% | 185% |
| 年度维护成本 | 320 万元 | 110 万元 | 65.6% |
六、技术演进方向
- 多光谱融合感知:增加紫外成像模块检测电晕放电
- 柔性传感器集成:开发耐高温柔性应变片监测炉体形变
- 数字孪生驱动:通过强化学习优化巡检路径规划
该系统的部署不仅实现了高危场景的 "零人化" 作业,更通过全要素数据采集为焦炉长寿化、生产智能化提供了底层支撑,标志着工业巡检从 "经验判断" 向 "数据决策" 的范式转变。

















 1205
1205

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









