



图像直方图
对于一幅数字图像而言,其灰度取值为 d j d_j dj 的像素数 n j n_j nj 为图像的直方图。图像的直方图清楚的表明了一幅数字图像中各个像素值范围的像素个数的多少,是二值化分割取阈值非常方便的数据。
基于区域的分割方法
1、 区域生长算法
常见的区域生长算法是依据图像像素值进行分割的算法。
具体如下:
- 选择种子点(种子点个数没有限制,但是越多算法效率也低,一般一个点比较好用)
- 确定生长准则(一般是用像素差作为生长准则)
- 终止生长
参考:区域生长算法
实现
## 区域生长算法
from PIL import Image
import numpy as np
from matplotlib import pyplot as plt
def region_grow(img):
img_array = np.array(img)
[m, n] = img_array.shape
a = np.zeros((m, n))
a[70, 70] = 1
K = 40
isMyarea = 1
while isMyarea == 1:
isMyarea = 0
lim = (np.cumsum(img_array*a)[-1])/(np.cumsum(a)[-1]) ## np.cumsum(a, axis=0)用于将数组进行累加,不加axis,
## 只有np.cumsum(a)则是按行一个一个往后累加
## 这里计算 mask a在原图中的区域的平均像素
for i in range(2, m):
for j in range(2, n):
if a[i][j] == 1:
for x in range(-1, 2):
for y in range(-1, 2):
if i+x >= m or j+y >= n:
continue
if a[i+x][j+y] == 0:
if (abs(img_array[i+x][j+y]) - lim <= K): #如果像素点与平均像素的差小于K,则把该区域
#定为生长区域
isMyarea = 1
a[i+x][j+y] = 1
#print(' 我是区域,我正在生长。。。。。')
#data = img_array * a
#print(a)
#new_img = Image.fromarray(data)
#print(np.unique(new_img))
#return new_img
return a
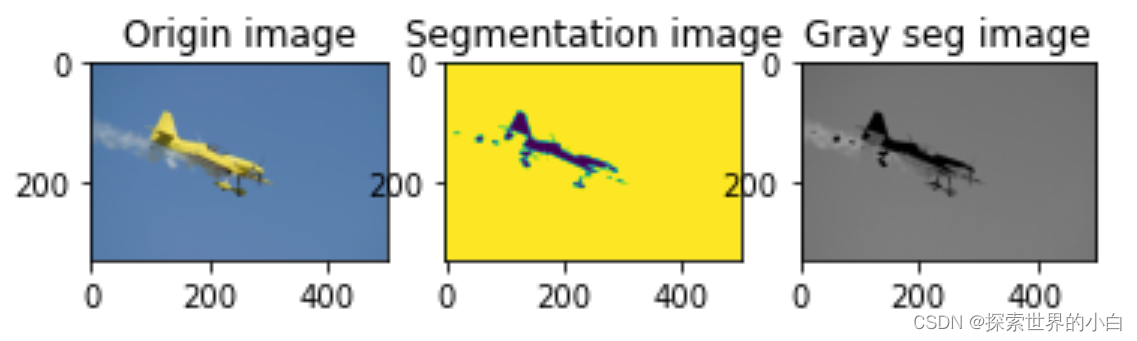
filename = '000228.jpg'
image = Image.open(filename)
img = image.convert('L')
a = region_grow(img)
plt.subplot(131)
plt.imshow(image)
plt.title("Origin image")
seg_img = Image.fromarray(np.array(img*a))
plt.subplot(132)
plt.imshow(a*255)
plt.title("Segmentation image")
plt.subplot(133)
plt.imshow(seg_img)
plt.title("Gray segment image")
plt.show()
常用的生长准则有:连续阈值法、邻接连续阈值法、梯度法、置信连接阈值法
参考:ITK中的几种区域生长准则
2、全局阈值化(global threasholding)
理论介绍
如果图像中的对象对应的灰度值接近于某一常数 C1 的分布区域,而背景的灰度值又接近另一常数 C2,且 C1, C2 差别够大,此时可以用二值化对图像进行分割。具体如下:首先根据图像的灰度直方图选定二值化的阈值,根据此阈值做如下二值化:
d
′
=
{
255
,
d > T
0
,
d <= T
d^{'}= \begin{cases} 255,& \text{d > T}\\ 0,& \text{d <= T} \end{cases}
d′={255,0,d > Td <= T
其中
d
d
d 为待分割图像的像素值,
T
T
T 为选定的二值化阈值。此时可以得到一幅二值图像,这称为全局阈值化。
代码实现
import cv2
import matplotlib.pyplot as plt
import numpy as np
filename = '000228.jpg'
image = cv2.imread(filename)## 读图像
image_gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
img = image.reshape(-1) ## 用于画直方图
img_gray = image_gray.reshape(-1)
plt.figure(figsize=(12, 6))
plt.subplot(1,2,1)
plt.hist(img, 64)
plt.title('colorful image histgram')
plt.xlabel('pixel value')
plt.subplot(1,2,2)
plt.hist(img_gray, 64)
plt.title('gray image histgram')
plt.xlabel('pixel value')
plt.savefig('histgram.png')
彩色图像与灰度图像的直方图,从灰度直方图中可以看到灰度图只有一个峰值,我们选择120为阈值,做二值化分割

T = 120 ## 选定的阈值
SEG_img = np.zeros_like(image_gray)
for i in range(image_gray.shape[0]):
for j in range(image_gray.shape[1]):
if image_gray[i][j] > T:
SEG_img[i][j] = 255
else:
SEG_img[i][j] = 0
SEG_img = np.ascontiguousarray(SEG_img)
cv2.imwrite('seg.jpg', SEG_img)
以下为待分割原图与分割后的图像效果


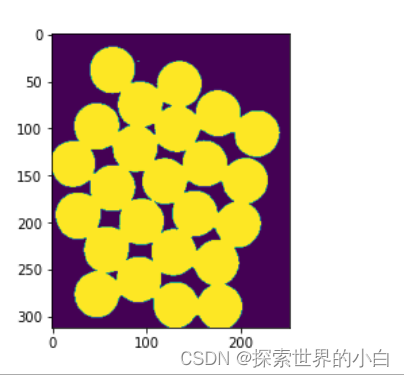
3、自适应阈值分割方法–分水岭算法
OpenCV官网给出了分水岭算法的使用示例,可见此处。算法过程如下:
1.转为灰度图;
2.形态学计算:腐蚀+膨胀,得到 P1,把原始有物体的区域放大;
3.计算距离图像,按 0.7 的位置转成灰度图,P2;
4.P1-P2,得到粗略图像 P3,这里把剩下的 0.3 的位置作为粗略边界;
5.利用 CV2 的连通域函数得到标记 markers;
6.markers + 1,使得所有连通域编号从1开始;
7.进而可以将 P3 的有值区域,即unknow 部分定 marker 为 0;
8.使用 cv2 的 watershed 函数实现算法,得到分割区域(对不同区域做了标记);
9.最后可在原图上对分割边界值进行标记,markers 为 -1 的为边界。
我自己实现了官网的代码,加了一些标注,作为笔记贴在这里。
## 分水岭算法
import cv2
import matplotlib.pyplot as plt
img = cv2.imread('water_coins.jpg')
## cv2.imread 读取图像为BGR格式,数据格式在0~255
assert img is not None, "file could not be read, check with os.path.exist()"
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
## cv2.cvtColor(p1, p2) 是颜色空间转换函数,p1是待转换的函数,p2是转换成何种格式(cv2.COLOR_BGR2RGB
## 将BGR转换成RGB,cv2.COLOR_BGR2GRAY 将BGR转换成灰度图像)
print(np.unique(gray))
ret, thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
'''
这一步应该是把有东西的地方都找出来
opencv中的二值化函数
cv2.threshold(img, thresh, maxVal, type) ## img 为源图,灰度图;thresh为对图像分割的阈值;
maxVal为像素大于(有时小于)阈值时给出的值;type表示划分的时候使用什么类型的算法
具体参考 https://blog.youkuaiyun.com/a19990412/article/details/81172426
'''
plt.imshow(thresh)
plt.show()
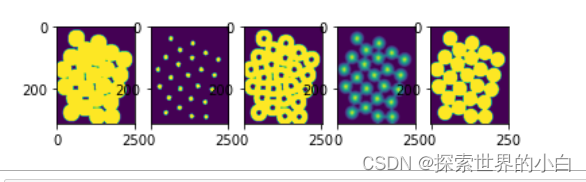
import numpy as np
kernel = np.ones((3,3), np.uint8)
opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations=2)
## cv2.morphologyEx(src, op, kernel) 进行各类形态学变化
## src:传入的图片. op:进行变化的方式. kernel:表示方框的大小
## op = cv2.MORPH_OPEN 是开运算,先进行腐蚀,再进行膨胀
## op = cv2.MORPH_CLOSE 是闭运算,先进行膨胀,再进行腐蚀
## 参考https://blog.youkuaiyun.com/qq_39507748/article/details/104539673
## https://zhuanlan.zhihu.com/p/110330329
sure_bg = cv2.dilate(opening, kernel, iterations=3)
## cv2.dilate 对图片进行膨胀处理,iterations 为膨胀次数
dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2, 5)
## cv2.distanceTransform 距离变换函数,结果图像中每个像素的灰度值为该像素与
## 与距离其最近的背景像素间的距离
ret, sure_fg = cv2.threshold(dist_transform, 0.7*dist_transform.max(), 255, 0)
sure_fg = np.uint8(sure_fg)
unknown = cv2.subtract(sure_bg, sure_fg)
print(unknown.max())
plt.subplot(1,5,1)
plt.imshow(sure_bg)
plt.subplot(1,5,2)
plt.imshow(sure_fg)
plt.subplot(153)
plt.imshow(unknown)
plt.subplot(154)
plt.imshow(dist_transform)
plt.subplot(155)
plt.imshow(opening)
plt.show()
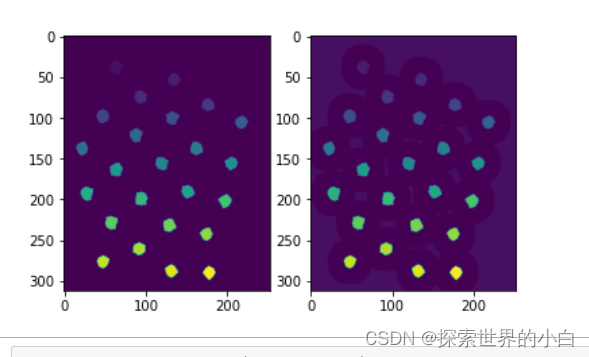
ret, markers = cv2.connectedComponents(sure_fg)
## cv2.connectedComponents 连通区域分析方法,返回连通域的数目和每个像素位置的标记
print(np.unique(markers))
markers = markers + 1 ## 使得有标记的区域数字从1开始
plt.subplot(121)
plt.imshow(markers)
markers[unknown==255] = 0
plt.subplot(122)
plt.imshow(markers)
plt.show()
markers = cv2.watershed(img, markers)
print(np.unique(markers))
img[markers==-1] = [255, 25, 128]
plt.subplot(121)
plt.imshow(markers)
plt.subplot(122)
plt.imshow(img)
plt.show()
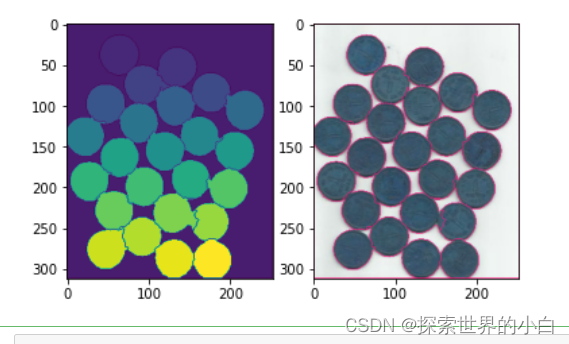
分水岭的具体实现可在知乎这篇文章看到,简单说就是首先对各个区域进行标记,然后对粗分割出的边界,即上面代码里的unknow部分逐像素进行分辨,采用堆栈的方式一次对每个像素进行归类,最后归到该像素左右两侧的像素不一致时,此像素即为边界。


















 2433
2433

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









