




目录
写在前面
本文适合拿到四驱仿真任务就开始挠头,想快速的改造出模型,对模型控制策略及相对精度没特殊要求的铁子们,大佬们不用看了,你们都会了。
本文转载自同名公众号:王浮生不怕生。
基于对模型的改造需求,我们分三种情况介绍,一种是就一个需求实现四驱就行,不关注控制策略,简称忽悠鬼型;第二种是实现四驱的同时考虑简单的扭矩分配,能量回收有就行,简称忽悠自己型;第三种需求是实现四驱的同时考虑能量回收及扭矩分配策略,可以忽悠别人了。至于基于效率最优分配、驾驶意图识别、模糊控制等不在本文讨论范畴
模型改造
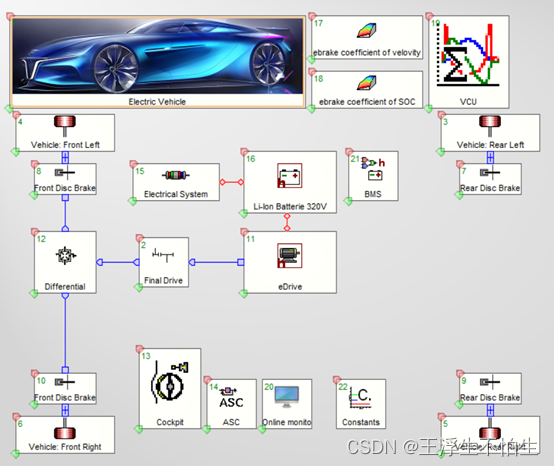
我们在《AVL-Cruise纯电动汽车仿真建模教程-能量回收策略的实现》一文中,以前驱车型为例,介绍了纯电动汽车能量回收及驱动控制,并使用Cruise软件建立了控制策略模型及车辆模型。本文我们在此模型的基础上进行双电机四驱改造,其他模型铁子们可适当参考文中思路。原模型如下图所示:
1.忽悠鬼型
忽悠鬼型最简单,但是不一定能把鬼忽悠住。
【1】复制一套动力系统至后轮,并创建好机械连接喝电器连接,这里需要注意扭矩传递方向。如下图,箭头朝向即为扭矩传递方向,
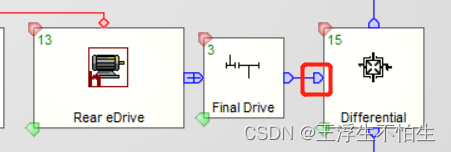
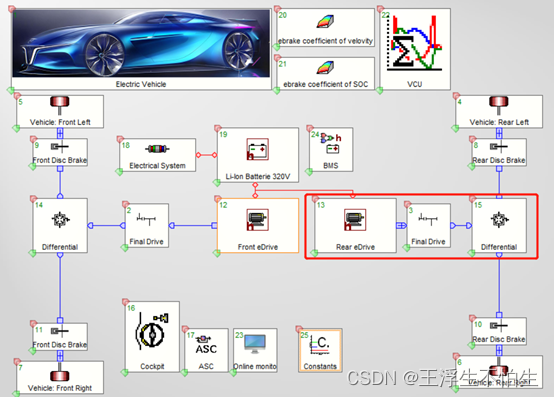
连接好的模型界面如下:
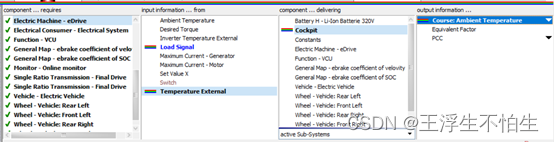
【2】连接信号线,这里只需要连接后驱电机的负载信号和温度信号
因为原模型中的电机负载信号由Function处理后输出,故将后驱电机负载信号连接至Function模块的LoadSignal接口。铁子们看下手里的模型,参考原电机的信号线连接即可。
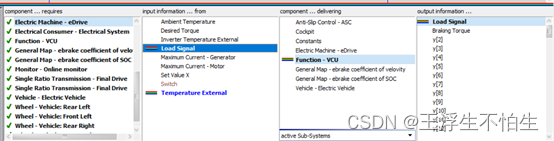
温度信号连接至cockpit的Ambient Temperature端口。
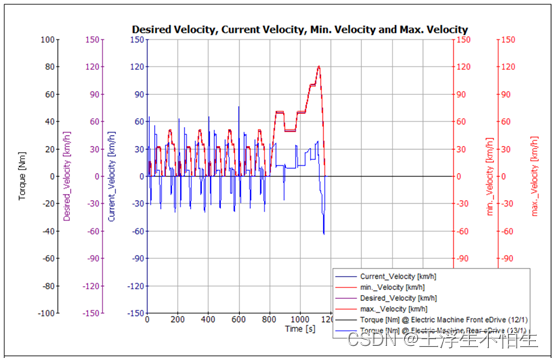
这样就完成了,从下图NEDC工况曲线可以看出车速跟随非常哇塞,而前后电机扭矩完全一致,没有主、辅驱的区别。
如果你觉得鬼其实没那么好糊弄,或者觉得光忽悠鬼还不够,那么继续往下看。
2.忽悠自己型
该类型要求实现四驱的同时考虑简单的扭矩分配,不关注能量回收策略。对于前后电机扭矩分配,我们实现以下策略:
【1】以后驱电机为主,低扭矩需求下靠后驱电机驱动
【2】踏板开度大于0.5时,认为有较大的扭矩需求,此时前驱电机进行扭矩补偿。
考虑到改造难度,我们这里不改动策略部分,通过general模块实现扭矩分配。
从模块库拖入一个general map模块,并通过属性窗口将mode更改为Characteristic。

General Map模块进行如下定义:
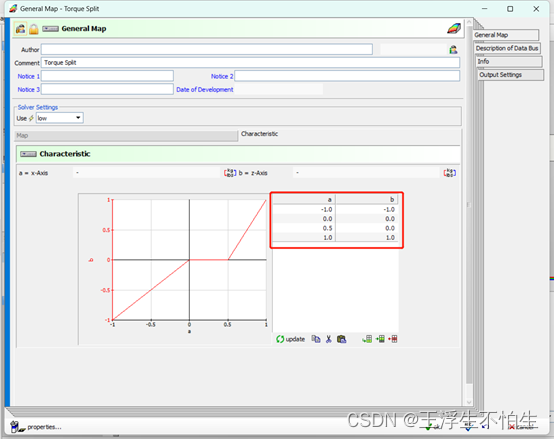
图中a列代表负载信号,b列代表修正后的前驱电机负载信号,当负载信号值在[-1,0]内时,不对前驱电机负载进行修正,按原值输出;当负载信号值在[0,0.5]时,前驱电机负载为0;当负载信号值在[0.5,1]时,前驱电机负载对应输出[0,1];是不是非常简单。
分别定义一个输入、输出接口,如下图。

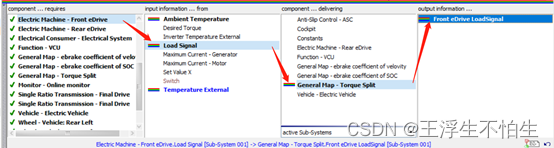
定义好之后我们把该General map的LoadSignal端口连接至Function的Load Signal端口
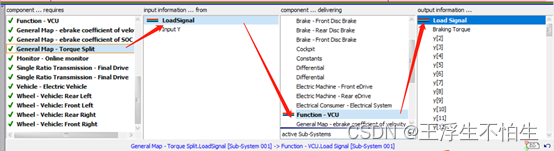
将前驱电机的Load Signal端口连接至该General Map的Front eDrive LoadSignal端口。
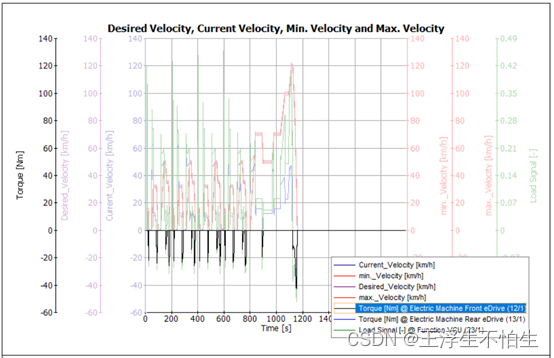
大功告成,我们同样跑一个NEDC工况,如下图此时Loadsignal未超过0.5,前驱电机只有回收扭矩,符合我们的需求。
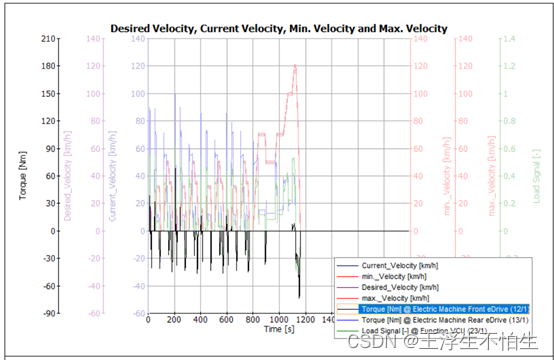
为了确认在LoadSignal大于0.5时前驱电机能否按需进行补偿,我们增加一部分车辆阻力。通过下图可以看出在Loadsignal大于0.5,此时仍以后驱为主驱电机,前驱电机提供一部分补偿扭矩,符合我们的需求。
3.结语
介于篇幅限制,第三种需求的改造方法我们下一篇介绍。铁子们可关注同名公众号:王浮生不怕生。
需要注意的是,本文旨在探讨通过AVL Cruise软件进行双电机四驱电动汽车的仿真建模思路,在建立模型的过程中忽略了若条件,对于工程项目而言本文所述模型并不具备所需精度,请慎用。
本文由“王浮生不怕生”,拒绝任何形式的抄袭及转载!
关注同名公众号,获取文中模型。


















 4856
4856




 到【灌水乐园】发言
到【灌水乐园】发言







