




本文仅供学习使用,如有侵权,请私信联系本人删除
Data Association Algorithm for Ballistic MissileTarget based on Optimal Assignment Strategy
基于最优指派策略的弹道导弹目标数据关联算法
文章脉络
全文概述
本文针对弹道导弹目标在突防过程中面临的密集诱饵干扰导致的数据关联难题,提出了一种基于最优分配策略的数据关联算法(OASDA)。在弹道导弹防御系统中,导弹战斗部周围常伴随大量诱饵和干扰物,这些目标在空间上高度密集,传统数据关联算法易产生误关联,导致目标识别错误和轨道计算偏差,进而缩短拦截窗口期。OASDA算法通过将数据关联问题建模为最优分配问题,构建综合隶属度评估函数,结合特征参数权重向量和关联阈值,利用匈牙利算法求解关联矩阵,最终实现测量与航迹的最优匹配。核心创新点包括:1)采用柯西分布函数量化特征参数隶属度,通过归一化残差、速度、航向等多维特征构建关联成本矩阵;2)设计可调权重向量,允许根据先验知识动态调整特征参数重要性;3)将传统预测门限方法抽象为综合隶属度函数,提升算法对相控阵雷达多维测量数据的适应性。仿真结果表明,该算法在密集目标环境下关联准确率显著提升,且通过UKF滤波器验证了其对杂波干扰的鲁棒性。研究为复杂电磁环境下弹道导弹防御系统的多目标跟踪提供了新思路。
术语解释
- OASDA(Optimal Assignment Strategy Data Association): 基于最优分配策略的数据关联算法,通过构建综合隶属度评估函数和关联成本矩阵,利用匈牙利算法求解测量与航迹的最优匹配问题,解决密集目标环境下的误关联难题。
- JPDA(Joint Probabilistic Data Association): 联合概率数据关联算法,通过计算所有可能关联组合的概率权重更新目标状态,适用于多目标杂波环境,但计算复杂度高且易导致航迹合并。
- UKF(Unscented Kalman Filter): 无迹卡尔曼滤波器,采用确定性采样策略近似非线性系统的状态分布,相比传统EKF具有更高精度,本文用于弹道目标状态估计以验证OASDA算法的鲁棒性。
论文速读
论文方法
方法描述
该文提出的是一种基于最优分配策略的数据关联算法,用于解决弹道目标数据关联问题。该算法将综合成员函数表示为关联矩阵,并通过求解关联矩阵来解决问题。在算法中,给定成本矩阵CM,对于每个元素aij1/dij,需要找到一个分配方案X{xij},使得总成本最小化,同时满足限制条件:任何测量都是与最多一个轨迹相关联,任何轨迹都是与最多一个测量相关联。
方法改进
该算法采用了四步优化过程来解决关联矩阵中的零值问题,从而得到最优的分配方案。具体来说,第一步是减去每行的最小值;第二步是减去每列的最小值;第三步是使用最少数量的水平线和垂直线覆盖所有零值;第四步是在没有被线条覆盖的最小值上创建额外的零值。
解决的问题
该算法可以有效地解决弹道目标数据关联问题,即如何将多个测量结果与相应的轨迹匹配,以实现对目标运动状态的跟踪和预测。该算法具有较高的准确性和效率,在实际应用中有广泛的应用前景。
论文实验
本文主要介绍了在超声波相控阵雷达中使用UKF滤波器估计目标状态的性能评估实验。该实验旨在研究不同特征参数权重对目标识别的影响,并通过仿真数据来验证算法的有效性。
实验内容包括以下几个方面:
- 目标识别能力评估:该实验通过对三个目标的距离、方位角和高度等特征参数进行分析,以判断算法是否能够准确地区分这三个目标。结果表明,在距离范围内,三个目标具有相对固定的飞行轨迹,因此可以区分它们。但在其他特征参数如方位角、高度、航向、速度和AD值等方面,这些目标之间存在重叠,难以区分。因此,将距离作为最重的权值(本论文中为0.7),而其他特征参数的权值较低(总权值仅为0.3)。
- 算法稳定性评估:该实验通过观察UKF滤波器的收敛情况来评估算法的稳定性。结果表明,在前28秒内,由于UKF滤波器尚未达到收敛状态,预测门框不稳定,导致一些杂波被错误地分配给弹道导弹目标。但一旦UKF滤波器达到收敛状态,预测门框变得稳定,集成成员函数计算的关联概率连续且良好。在图1中,UKF滤波器在时间28秒之前不稳定,但之后三个弹道目标平行飞行没有错误的关联。
综上所述,本文通过实验证明了在超声波相控阵雷达中使用UKF滤波器估计目标状态的方法是有效的,并且可以通过调整特征参数的权值来提高算法的性能。
关键图表解读
关键图表解读
图1:OASDA算法数据关联结果展示。该图显示在28秒后UKF滤波器收敛后,三个弹道目标实现稳定平行飞行,未出现虚假关联。图中可见初始阶段存在杂波回波误关联,但随着滤波器收敛,关联概率计算值持续稳定,验证了算法在密集目标环境下的有效性。
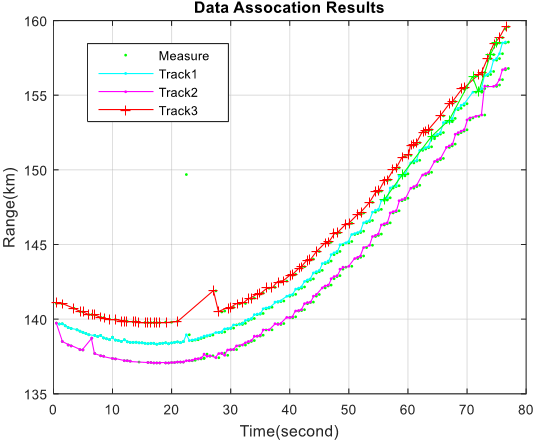
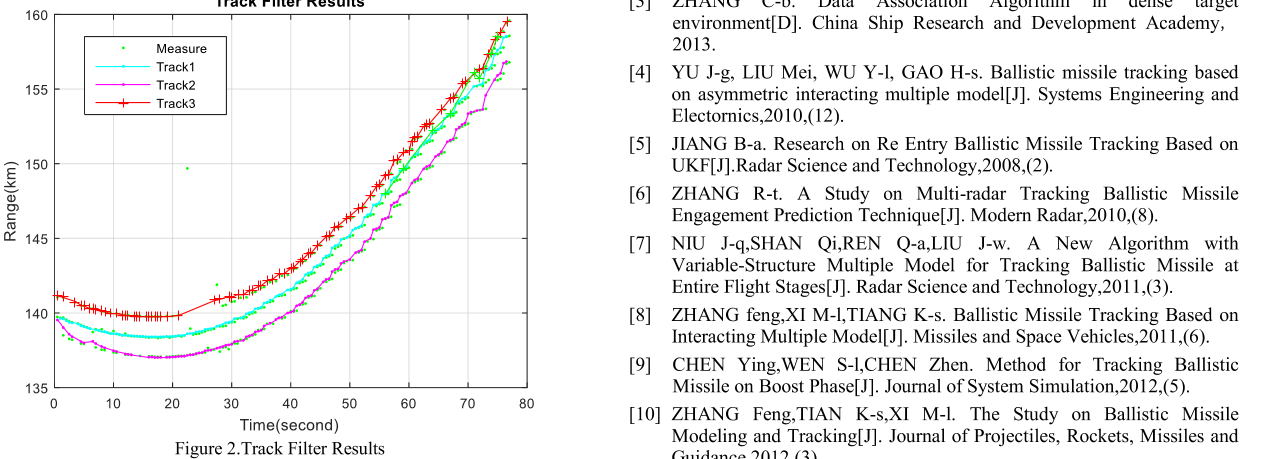
图2:UKF滤波器估计结果对比。该图对比了滤波后的距离估计值与原始测量值,显示滤波后的距离值更加平滑,未受关联杂波回波影响。这证明了UKF滤波器通过运动模型预测轨迹的能力,能够容忍部分异常测量值而不损失性能。
论文总结
文章优点
- 论文提出了一种基于最优分配策略的数据关联算法,能够有效地解决密集目标环境下的数据关联问题。
- 算法利用了Cauchy分布函数来评估特征参数的成员度,并结合权重向量来进行综合评估,提高了数据关联的准确性。
- 论文采用了最优分配算法来解决数据关联矩阵的问题,具有较高的实时性能和可扩展性。
方法创新点
- 该算法将数据关联问题转化为优化问题,并使用最优分配算法求解,与传统的概率数据关联算法相比,更加高效且准确。
- 算法考虑了多个特征参数的影响,并通过加权的方式进行综合评估,提高了数据关联的精度。
- 算法适用于密集目标环境下的数据关联问题,具有较好的适用性和可扩展性。
未来展望
- 可以进一步研究如何处理多传感器融合的情况,提高数据关联的鲁棒性和可靠性。
- 可以探索如何在更复杂的环境下应用该算法,如城市背景下的导弹防御系统等。
- 可以尝试将该算法与其他数据关联算法进行比较和对比,进一步验证其优越性。
全文翻译




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









