




 本文深入探讨了图的五种常见存储结构:邻接矩阵、邻接表、十字链表、邻接多重表和边集数组,分析了各自的特点、适用场景及优缺点,为选择合适的图存储方式提供指导。
本文深入探讨了图的五种常见存储结构:邻接矩阵、邻接表、十字链表、邻接多重表和边集数组,分析了各自的特点、适用场景及优缺点,为选择合适的图存储方式提供指导。
以下说法均建立在简单图上,即无环无重复边的图。
本文将介绍图的常见存储结构及各自的优缺点
- 邻接矩阵
- 邻接表
- 十字链表
- 邻接多重表
- 边集数组
邻接矩阵
用两个数组来表示图:一个一维数组存储图中顶点信息,一个二维数组(称为邻接矩阵)存储图中边(无向图)或弧(有向图)的信息
若图有n个顶点,则邻接矩阵则为一个n*n的方阵
定义为:

eg:
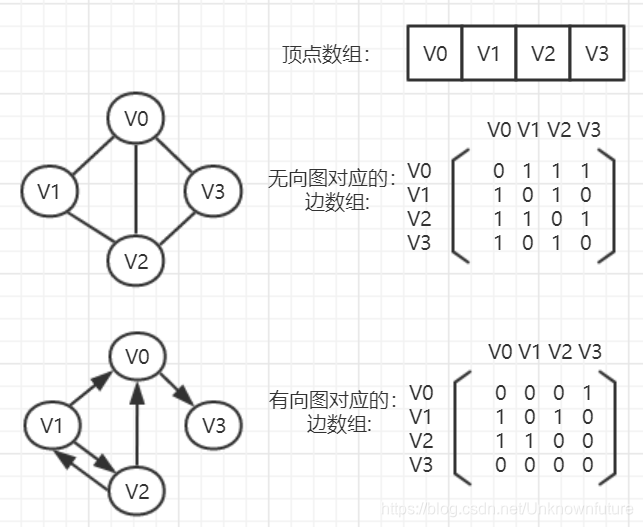
根据定义,可知对角线的值无论是无向图还是有向图均为0。
对于无向图,邻接矩阵是对称的,但有向图并无该特性。
优点:
容易获得每个顶点的度,特别是对于有向图,获得顶点i的出度,只需遍历第i行,即arc[i]的值,入度也只需遍历第i列,即arc[][i]。
缺点:
对于边数相对顶点较少的图,浪费了极大的存储空间。
邻接表
如上所述,顺序存储可能造成存储空间浪费的问题,所以就引出了链式存储结构。
- 对于顶点数组,每个数据元素需要存储指向第一个邻接点的指针。
- 每个顶点Vi的所有邻接点构成一个线性表,并用单链表存储;无向图称为顶点Vi的边表,有向图称为顶点Vi为弧尾的出边表
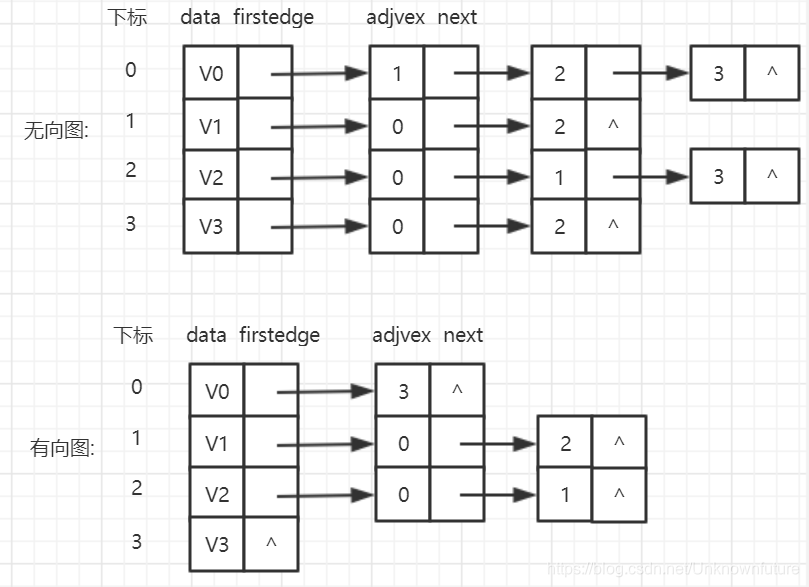
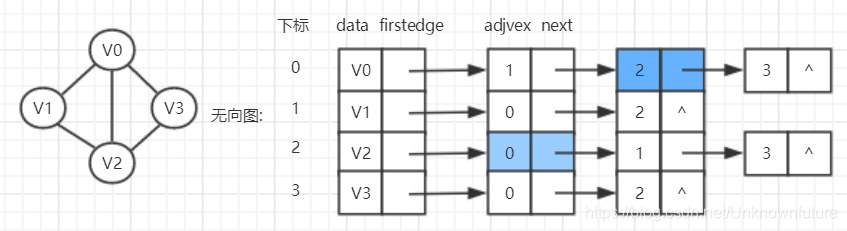
如图 - 顶点表的各个结点由data跟firstedge两个域表示。
data是数据域,存储顶点的信息,firstedge是指针域,指向此顶点的第一个邻接点。 - 边表结点由adjvex和next两个域组成。
adjvex是邻接点域,存储某顶点的邻接点在顶点中的下标,next则存储指向边表中下一个结点的指针。
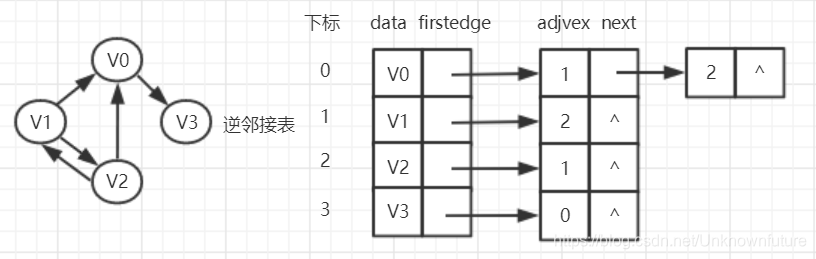
但正如定义,对于有向图,邻接表只存储了各顶点相应的出边,若要便利地获得入度,则可以同理建立一个逆邻接表:对每个顶点都建立一个链接为Vi为弧头的表
缺点:
对于有向图,出度入度是不兼得的,要两样都获得就只能分别建立、遍历对应的邻接表和逆邻接表。空间利用率和效率也不高。
十字链表
把邻接表和逆邻接表结合起来,就得到了十字链表。所以十字链表也是专门为有向图设计的。
-
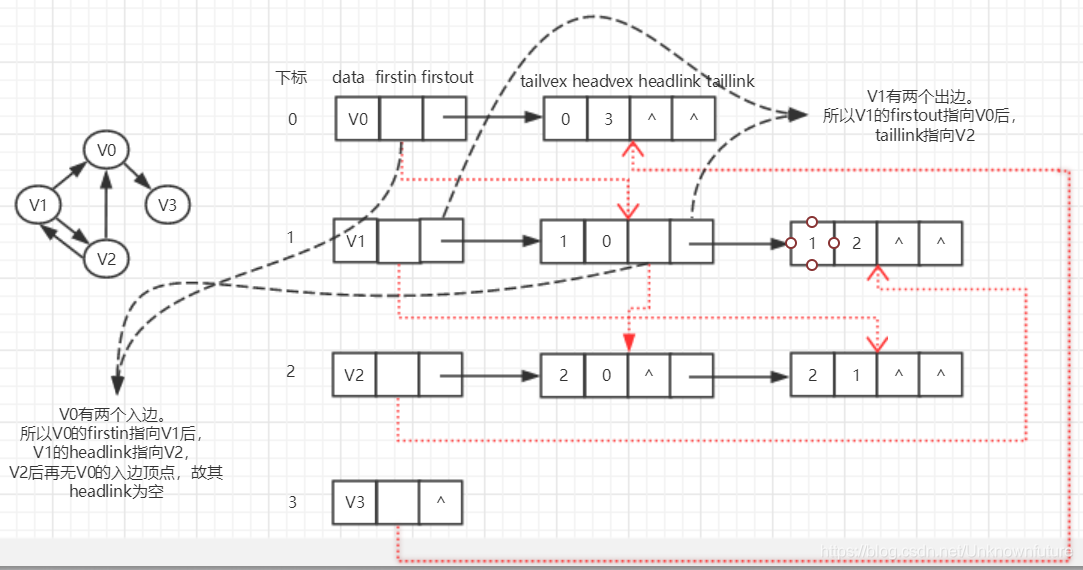
重新定义顶点表结点结构为:
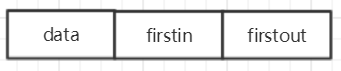
firstin、firstout 分别指向入边表、出边表中的第一个结点 -
重新定义边表结点结构为:

注意 tail、head分别指弧尾、弧头,不要混乱。
tailvex、headvex分别指弧起点(即弧尾)、弧终点(即弧头)在顶点表中的下标。
headlink是指入边表指针域,指向终点相同的下一条边(即弧头相同,所以命名为headlink);
taillink是指出边表指针域,指向起点相同的下一条边(即弧尾相同,所以命名为taillink)
当然了,并不是说十字链表一定比邻接表好,也是看实际需求是否需要同时访问出入度。
邻接多重表
既然十字链表是有向图的优化存储结构,那邻接表对于无向图有没有什么缺点呢?答案是肯定的。
若我们关注的重点是顶点,那邻接表自然是不错的选择;
但如果更关注边的操作,比如删除边(V0,V2)
我们就需要删除图中的两个阴影结点,显然是比较麻烦的。
所以邻接多重表就应运而生了。
- 重新定义边表结点结构为:

其中ivex、jvex是与某条边依附的两个顶点在顶点表中的下标,
ilink指向依附顶点 ivex的下一条边,同理,
jlink指向依附顶点 jvex的下一条边。
当然,因为是无向图,所以ivex跟jvex是什么顺序都是无所谓的,但为了绘图方便,此处将ivex值设置得与一旁顶点下标相同。
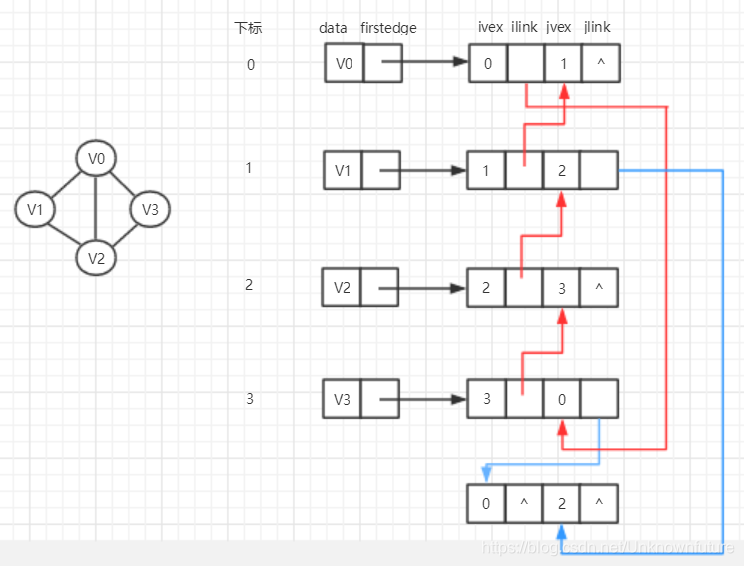
邻接多重表和邻接表的差别,仅仅在于同一条边在邻接表中用两个结点表示,而在邻接多重表中只有一个结点。
所以上述的删除(V0,V2)边,只需要把图中浅蓝色的边对应的链接指向改成^即可。
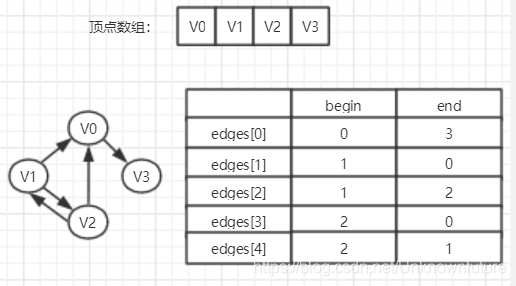
边集数组
邻接表关注的是顶点,十字链表则是对有向图的优化,但关注的重点仍然是顶点;邻接多重表则是对无向图的优化,关注重点是边。
那缺了什么了?没错,就是有向图的关注边的操作时所用的结构,就是本节所说的边集数组。
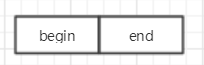
边集数组由两个一维数组构成。
一个存储顶点的信息(即顶点数组),
另一个是存储边的信息:边数组的每个数据元素由一条边的起点下表(begin)、终点下标(end)组成。
人如其名,边集数组关注的是边的集合。在边集数组中查找一个顶点的度需要扫描整个边数组,效率并不高。因此更适合与边相关的操作,而不适合对顶点相关的操作。
汇总
| 结构 | 优点 | 缺点 | 关注点 |
|---|---|---|---|
| 邻接矩阵 | 通用性强 | 需求空间大 | |
| 邻接表 | 节省空间 | 对有向图无法兼备出度入度 | 顶点 |
| 十字链表 | 对有向图兼得出度入度 | 有向图、顶点 | |
| 邻接多重表 | 无向图边操作简单 | 无向图、边 | |
| 边集数组 | 有向图边操作简单 | 有向图、边 |
缺点为空并不代表没有缺点,关注点一列的对应的其实就是优点,反之则是缺点。
参考内容:《大话数据结构》
若有误欢迎指出。

















 1340
1340



 到【灌水乐园】发言
到【灌水乐园】发言








