




 本文介绍了ALIENTEK的RGBLCD屏幕中的ATK7016如何驱动电容触摸屏,重点讲述了电容触摸屏的发展、分类,以及ATK7016的结构和使用的FT5426驱动IC的工作原理。通过中断方式读取触摸坐标数据,提供了初始化和读取触摸数据的例程。
本文介绍了ALIENTEK的RGBLCD屏幕中的ATK7016如何驱动电容触摸屏,重点讲述了电容触摸屏的发展、分类,以及ATK7016的结构和使用的FT5426驱动IC的工作原理。通过中断方式读取触摸坐标数据,提供了初始化和读取触摸数据的例程。
一 简介
在了解 RGBLCD 成像原理后 继续学习触摸屏使用
ALIENTEK 的三款 RGB LCD 屏幕都支持多点电容触摸,本章就以 ATK7016 这款 RGB LCD 屏幕为例讲解一下如 何驱动电容触摸屏,并获取对应的触摸坐标值。
1.1 触摸屏发展史
1993年,电阻式的触摸屏被用到了苹果掌上电脑Apple Newton;后来乔布斯又用iPad重新定义了平板电脑的概念和接下来iPhone手机的面世,让以触摸技术结合各种应用软件的智能产品开始逐渐商用化 在此过程中 电容触摸屏也应运而出,电容式触摸屏 普及时间是2007年以后,各种智能手机和平板电脑都使用了触控面板,家喻户晓
和电阻触摸屏相比,电容触摸屏最大的优点是支持多点触摸 ( 后面的电阻屏也支持多点触摸,但是为时已晚 ) ,电容屏只需要手指轻触即可,而电阻屏是需要手指给予一定的压力才有反应,而且电容屏不需要校准。
https://blog.youkuaiyun.com/TyearLin/article/details/131524815ALIENTEK 的三款 RGB LCD 屏幕都是支持 5 点电容触摸屏的
1.2 触摸屏 主要分类
触摸屏根据所用的介质以及工作原理,可分为电阻式、电容感应式、红外线式和表面声波式四种
- 电阻式触摸屏:这种触摸屏利用压力感应进行控制,以电阻薄膜屏为基础,是一种多层复合薄膜,由一层玻璃或硬塑料填以纤维或凝胶等材料构成。 精度高,反应灵敏,对环境的要求比较低,而且没有辐射,屏幕厚度比较薄,一般为5mm左右,价格相对低廉。由于主要利用压力感应,因此容易产生漂移,而且表面损伤后,修复较难,需要用整个更换。
- 电容式触摸屏:这种触摸屏利用人体的电流感应进行工作,主要由触摸屏传感器和触摸屏控制器组成。传感器一般采用四线或五线电阻式,控制器通过电容式触摸屏左上角和右下角电极中必须有一个加以控制。 支持多点触摸、耐用度高、防尘、防水、耐磨、反应灵敏、对环境的要求比较低、无辐射。 精度不高、如果屏幕较小,触摸困难,因而漂移现象比较严重、成本偏高。
- 红外线式触摸屏:这种触摸屏利用手指释放的红外线进行定位,工作原理是在触摸屏的前面设置一个条形音箱,音箱的透光率为零,然后利用音箱接收这些红外线并反射到屏幕的左右角顶端,再由触摸屏反射到音箱。 性能稳定、无漂移、无须力度触摸 但色彩还原能力光照情况下较差
- 表面声波式触摸屏:这种触摸屏利用表面声波技术进行定位。表面声波是一种超声波,采用先进的表面声波处理技术进行定位。具有 反应灵敏、漂移小、可以持续进行高精度高质量的定位,并且屏幕具有防暴保护作用,抗恶劣环境能力较高等特性,
根据屏幕材质又可分为 LCD、TFT、IPS、OLED、AMOLED屏
二 结构原理
电容式触摸屏的主要组成结构是盖板、触摸传感器和触摸控制板组成
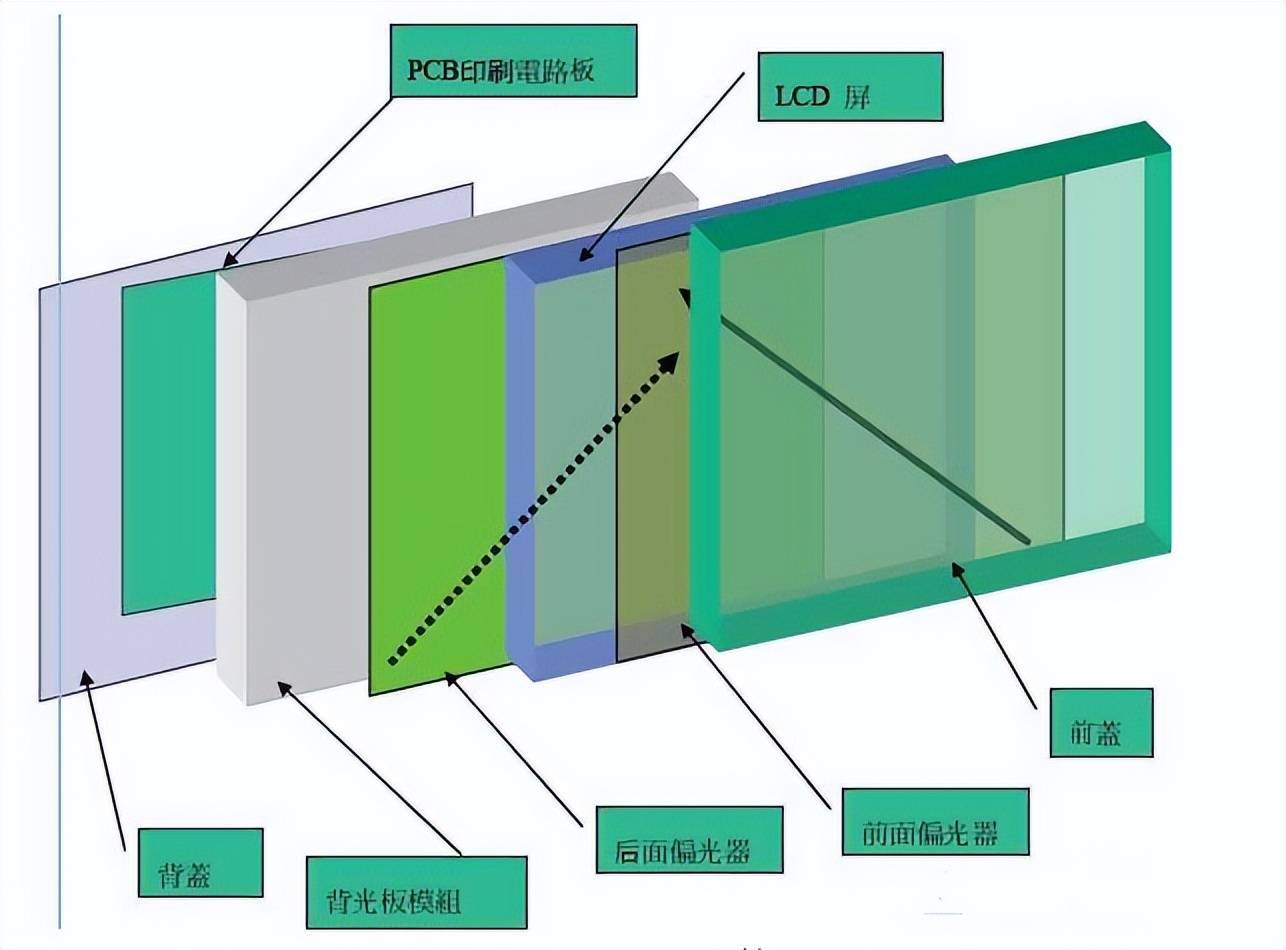
2.1 ATK-7016
ATK-7016
这款屏幕其实是由
TFT LCD+
触摸屏组合起来的。底下是
LCD
面板,上面是触
摸面板,将两个封装到一起就成了带有触摸屏的
LCD
屏幕。
2.2 FT5426
电容触摸屏也是需要一个驱动 IC 的,驱动 IC 一般会提供一个 I2C 接口给主控制器,主控制器可以通过 I2C 接口来读取驱动 IC 里面的触摸坐标数据。ATK-7016、ATK-7084 这两款屏幕使用的触摸控制 IC 是 FT5426,ATK- 4342 使用的驱动 IC 是 GT9147。这三个电容屏触摸 IC 都是 I2C 接口的,使用方法基本一样。
FT5426
这款驱动
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 426
426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









