




随着车载以太网在域控制器架构中的普及,开发人员面临物理层转换、通信监控与协议仿真的技术整合挑战。本文以ZD-Converter 2000为技术载体,解析其多模态测试功能的硬件实现与工程应用。
一、核心硬件架构
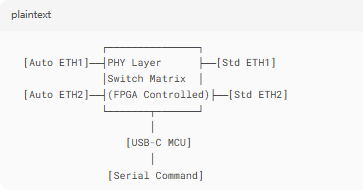
1. 接口拓扑设计
-
双路独立交换矩阵:通过FPGA实现4端口(2×车载以太网+2×标准以太网)的数据路由
-
物理层芯片组:
-
车载端:Marvell 88Q2112(支持100/1000Base-T1,兼容OPEN Alliance TC10睡眠模式)
-
标准端:Realtek RTL8211F(10/100/1000M自适应)
-
2. 工作模式切换原理
| 模式 | 硬件路径 | 技术特性 |
|---|---|---|
| 转换器 | Auto ETH⇄FPGA⇄Std ETH | 实时MAC帧重构(保留VLAN标签) |
| 嗅探器 | Auto ETH→FPGA→Std E |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2872
2872

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









