



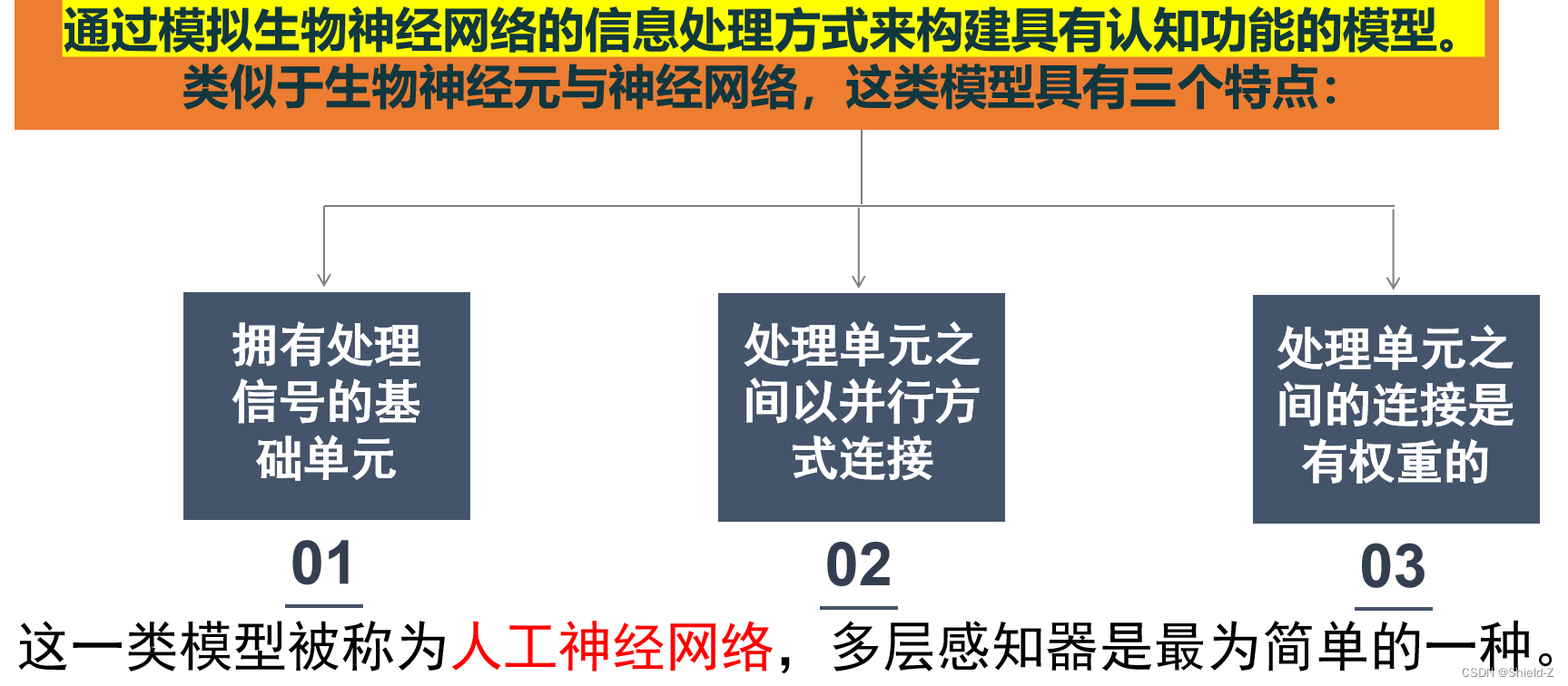
 本文介绍了感知器的基本概念,包括单层感知器的结构和训练过程,以及如何通过权值调整优化输出。重点强调了单层感知器的局限性——处理线性不可分问题,进而引出多层感知器在解决复杂问题上的优势,如异或函数的实现。
本文介绍了感知器的基本概念,包括单层感知器的结构和训练过程,以及如何通过权值调整优化输出。重点强调了单层感知器的局限性——处理线性不可分问题,进而引出多层感知器在解决复杂问题上的优势,如异或函数的实现。
感知器的概念由 罗森布拉特·弗兰克 在1957年提出,它是一种监督训练的二元分类器。
一、单层感知器
考虑一个只包含一个神经元的神经网络。
这个神经元有两个输入x1,x2,权值为w1,w2。其激活函数为符号函数:
根据感知器训练算法,在训练过程中,若实际输出的激活状态 o 与预期输出的激活状态 y 不一致,则权值按以下方式更新:
w ' ← w + α · ( y - o ) · x
其中,w ' 为更新后的权值,
w为原权值,
y为预期输出,
x为输入,
α为学习率。
学习率既可以为固定值,也可以在训练中进行适应性的调整。
例如:
我们设定学习率 α = 0.01,把权值初始化为 w1 = -0.2,w2 = 0.3
若有训练样例 x1 = 5、x2 = 2;y=1,则实际输出与期望输出不一致:
o = sgn(-0.2 * 5 + 0.3 * 2)= -1
因此对权值进行调整:
w1 = -0.2 + 0.01 * 2 * 5 = -0.1
w2 = 0.3 + 0.01 * 2 * 2 = 0.34
直观上来说,权值更新向着损失减小的方向进行,即网络的实际输出 o 越来越接近预期的输出 y 。在这个例子中我们看到,经过以上一次权值更新之后,这个样例输入的实际输出
0 = sgn(-0.1 * 5 + 0.34 * 2)= 1,已经与正确的输出一致。
我们只需要对所有的训练样例重复以上的步骤,直到所有的样本都得到正确的输出即可。
二、多层感知器
单层感知器可以拟合一个超平面 y = ax₁ + bx₂,适合于线性可分的问题,而对于线性不可分的问题则无能为力。考虑异或函数作为函数的情况:
异或函数需要两个超平面才能进行划分。由于单层感知器无法克服线性不可分的问题,引入了多层感知器(Multi-Layer Perceptron,MLP),实现了异或运算,如图:
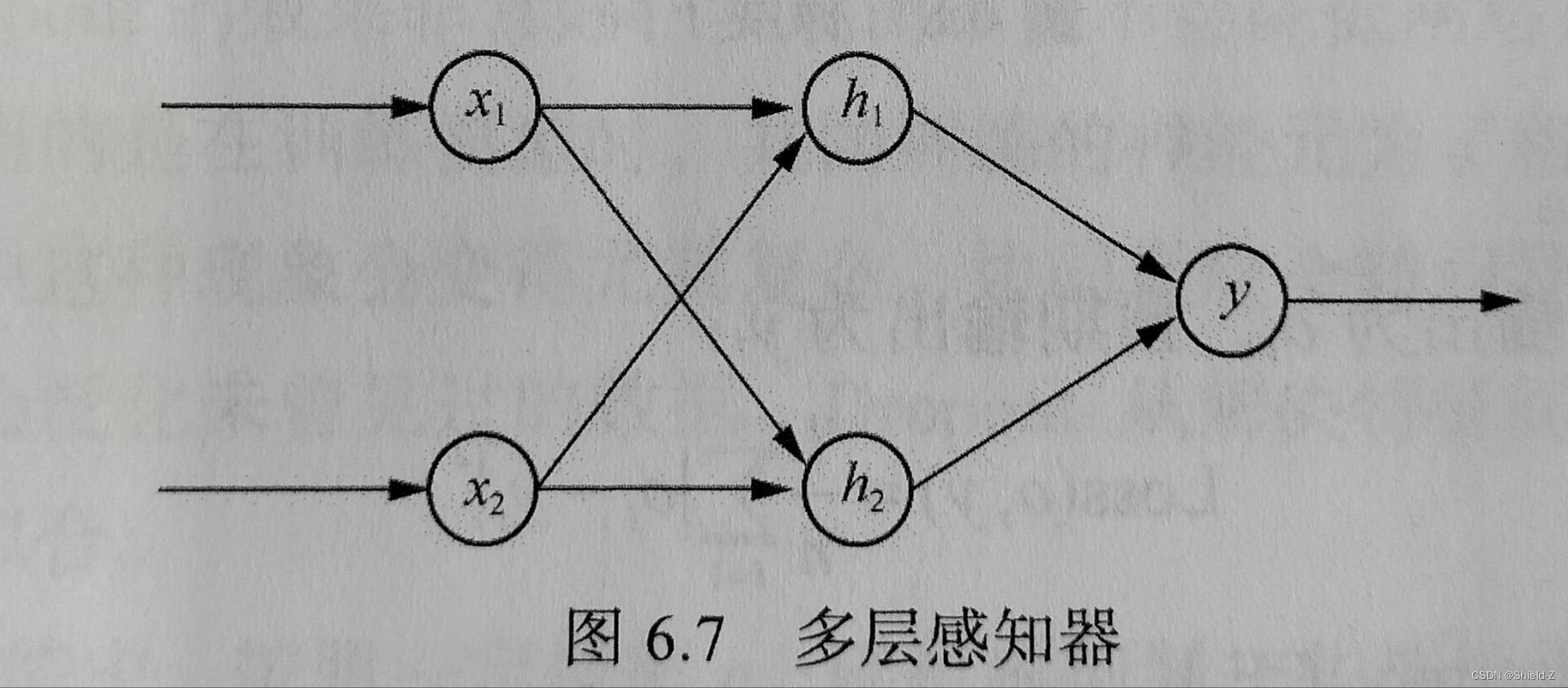
图中的隐藏层神经元 h₁ ,h₂ 相当于两个感知器,分别构造一个超平面

















 1722
1722

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









